目錄
- 1.摘要
- 2.算法背景
- 3.GDRRT*-PSO與虛擬領航者跟蹤算法
- 4.結果展示
- 5.參考文獻
- 6.算法輔導·應用定制·讀者交流
1.摘要
隨著無人機技術的快速發展及其卓越的運動和機動性能,無人機在社會和軍事等諸多領域得到了廣泛應用。多無人機協同作業,能夠顯著提升任務執行的效率和速度,因此成為當前研究的熱點。無人機已在娛樂、交通、物流、社會治理以及軍事偵察、跟蹤和打擊等多個場景中發揮著重要作用,推動了群體智能系統的研究進步。本文提出了一種創新無人機群體拓撲結構,將一致性虛擬領航者跟蹤群集算法(CBVLTSA)與基于目標距離快速擴展隨機樹-粒子群優化算法(GDRRT*-PSO)相結合,實現了高效的隊形控制與路徑規劃。GDRRT*-PSO在大范圍環境下具備高效的路徑搜索和快速收斂能力,并通過粒子群優化進一步縮短路徑長度。CBVLTSA則通過勢函數推拉機制,協調群體成員之間的協作與避障,同時保持隊形和安全飛行。
2.算法背景
GDRRT*和GDRRT*-PSO路徑規劃算法
GDRRT* 是在傳統RRT算法基礎上發展而來,專為無人機三維環境設計。相較于RRT* ,它不僅具備更快的目標收斂速度和更低的計算成本,還有效克服了環境規模擴大時路徑規劃效率下降的問題。GDRRT* 通過引入受控的采樣機制,減少了隨機性,使得采樣點能夠更有針對性地朝目標區域分布,從而提升了路徑規劃的效率和穩定性。隨機樣本分配:
xrand=(xcurrent?d2)+rand(0,1)×((xcurrent+d2)?(xcurrent?d2))x_{rand}=\mathrm{~}\left(x_{current}-\frac{d}{2}\right)+rand(0,1)\times\mathrm{~}\left(\left(x_{current}+\frac{d}{2}\right)-\left(x_{current}-\frac{d}{2}\right)\right) xrand?=?(xcurrent??2d?)+rand(0,1)×?((xcurrent?+2d?)?(xcurrent??2d?))
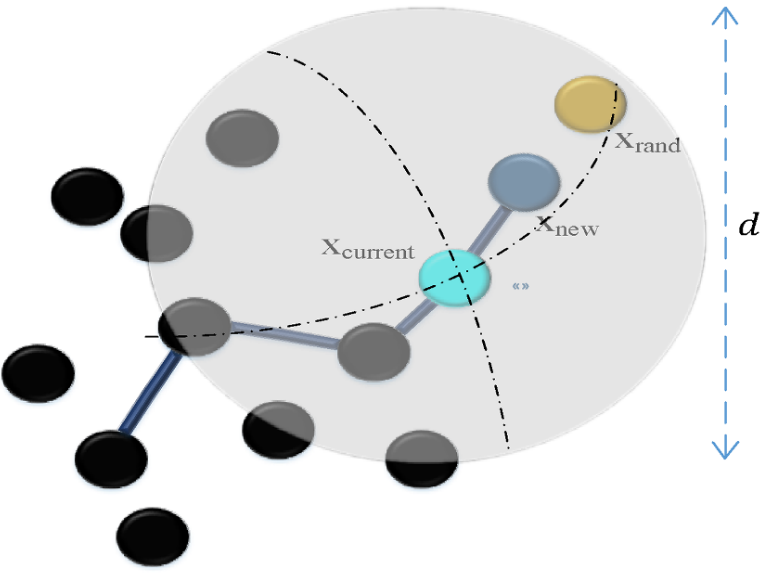
GDRRT* 在采樣時會將新節點限制在以當前節點為中心、半徑為d/2的空間范圍內,而不是在整個空間內隨機采樣。這種約束讓每次采樣都更加接近目標,提高了算法的收斂速度。
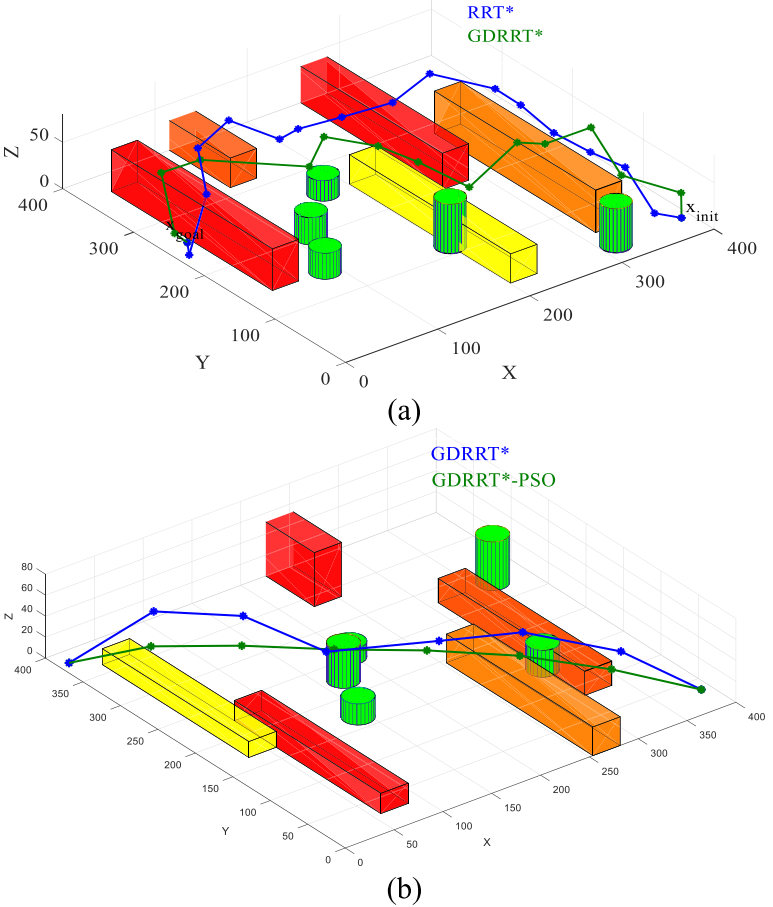
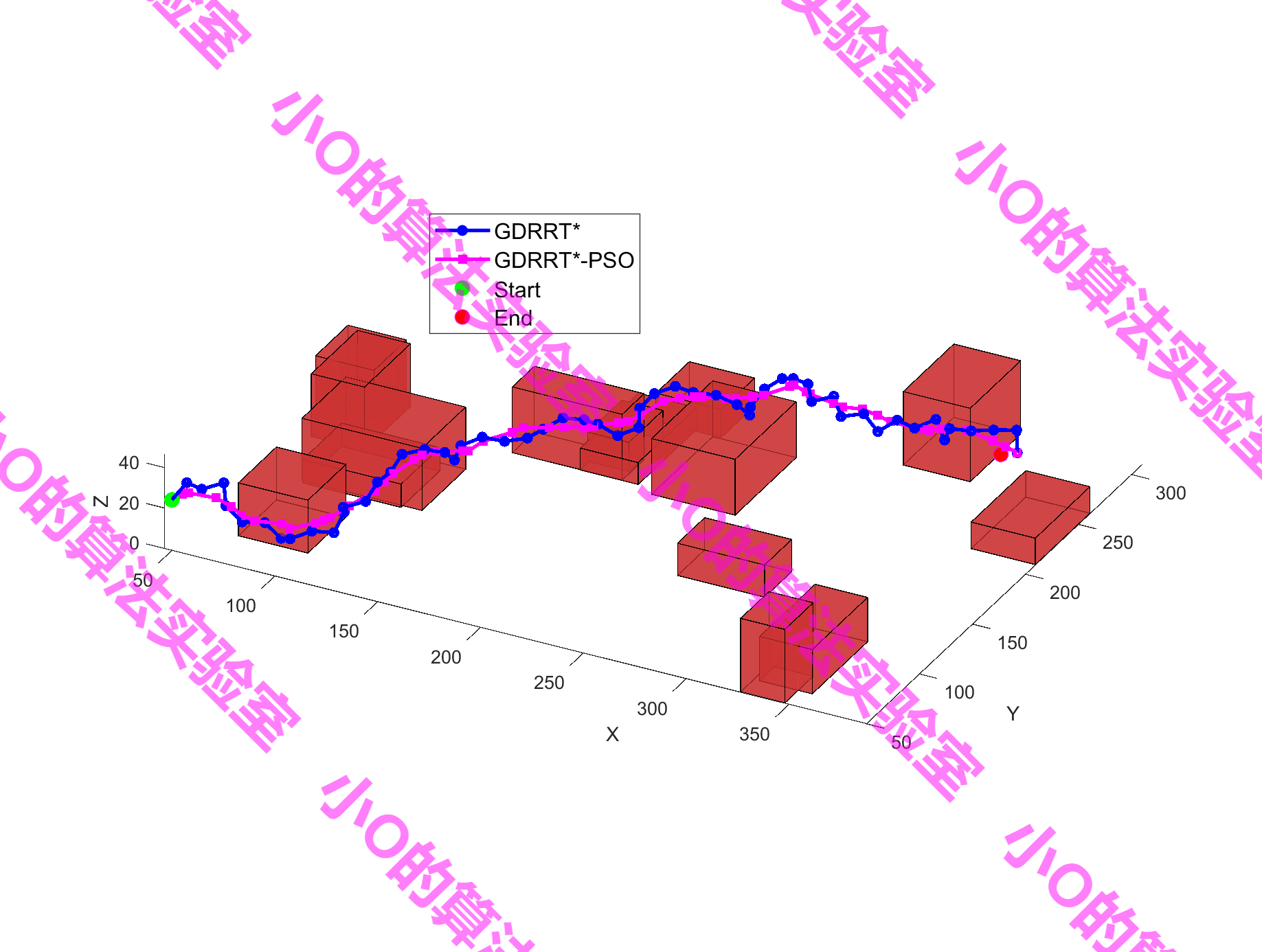
在路徑長度優化方面,結合PSO算法(GDRRT*-PSO)能夠進一步縮短GDRRT* 規劃路徑。多次實驗表明,GDRRT* -PSO在路徑長度和規劃時間上都優于單獨的GDRRT* 和RRT算法。在不同三維環境下,GDRRT*-PSO不僅大幅減少了規劃時間,也有效縮短了最終路徑。
離散時間一致性算法
基于一致性群體算法是一種根據協作群體成員之間的鄰域關系來實現信息流動的算法。當第iii個群體成員向其鄰居jjj有信息流動(dij>0d_{ij} > 0dij?>0)時,協作數據流的更新:
Ci(t+1)=∑j∈NidijCi(t)C_i(t+1)=\sum_{j\in N_i}d_{ij}C_i(t) Ci?(t+1)=j∈Ni?∑?dij?Ci?(t)
相反,如果dij=0d_{ij} = 0dij?=0,則認為兩者之間沒有信息傳遞。
當將鄰居關系轉化為矩陣形式后,群體成員之間的信息交互可以通過一個行隨機矩陣DDD來描述。每一時刻,各成員根據自身和鄰居狀態的加權平均來更新自己的信息。只要鄰接關系形成的網絡結構滿足一定條件,矩陣
DDD會有一個特征值為1,其余特征值都在單位圓內。所有成員的狀態最終都會收斂到一個共同值,這個值是初始狀態的加權平均。
一致性虛擬領航者跟蹤群體拓撲結構
在UAV建模中,基本物理動力學可以根據位置、速度或加速度來定義。本研究采用離散時間單積分器動力學模型:
xi(t+1)=xi(t)+ui(t),i?Nx_i(t+1)=x_i(t)+u_i(t),i\epsilon N xi?(t+1)=xi?(t)+ui?(t),i?N
其中,xi(t)x_i(t)xi?(t)表示第iii架無人機在三維空間中的瞬時位置,控制輸入ui(t)u_i(t)ui?(t)決定了其下一時刻的位置xi(t+1)x_i(t+1)xi?(t+1) 。無人機集群的規模用NNN表示,NNN是包含所有群體成員的集合,每個成員都有一個半徑為εr\varepsilon_rεr?的球形傳感器感知范圍。
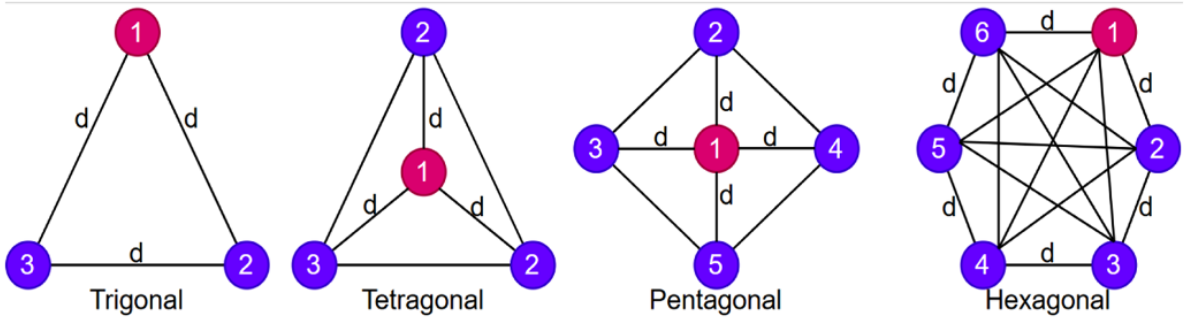
在基于一致性群體拓撲結構中,成員之間的全局通信及每個成員對數據流的貢獻帶來了顯著優勢,該拓撲采用分布式有向圖(Distributed Directed Graph, DDG)來描述,其中每個成員可以實時共享位置信息。
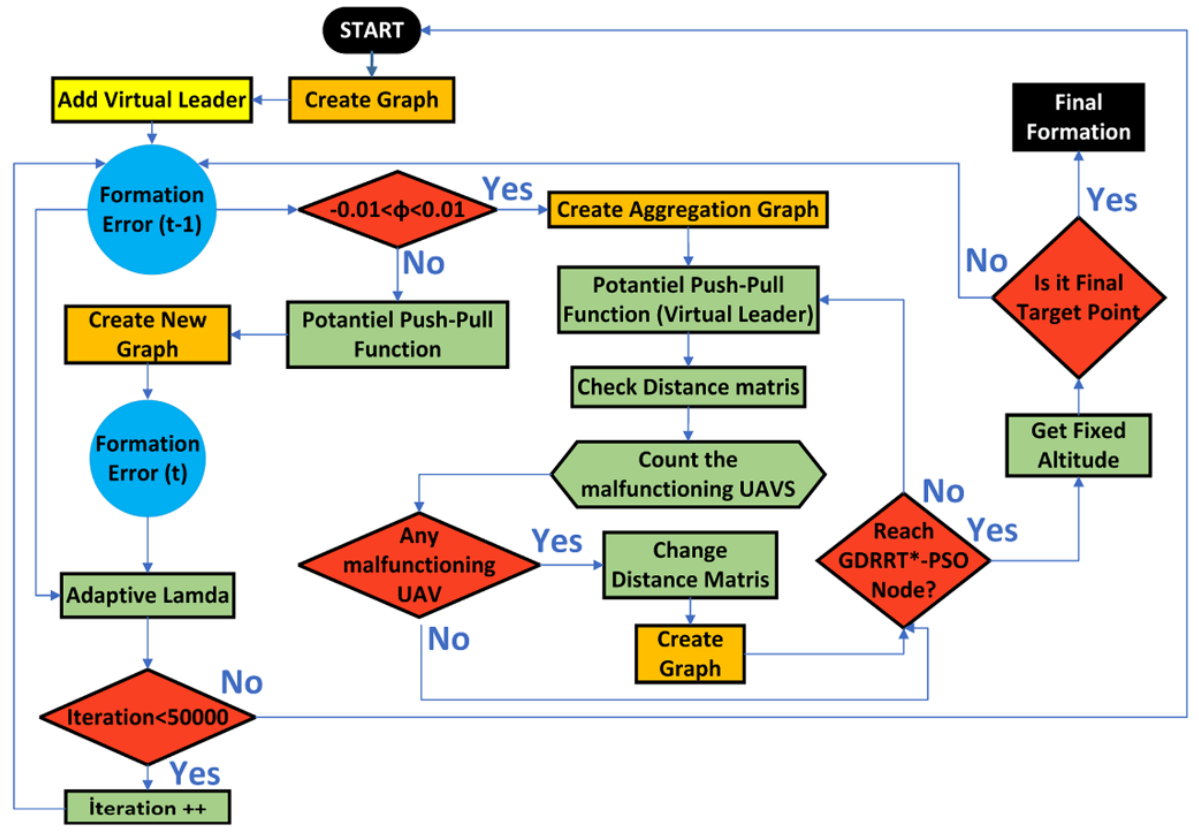
3.GDRRT*-PSO與虛擬領航者跟蹤算法
真實領航者跟蹤適合小范圍應用,但在大范圍環境下容易導致系統失穩。因此,本文將虛擬領航者一致性算法與GDRRT*-PSO路徑規劃融合,實現了隊形穩定與高效路徑規劃的統一,該混合算法能動態調整隊形和通信結構,提高了無人機群的魯棒性與任務效率。
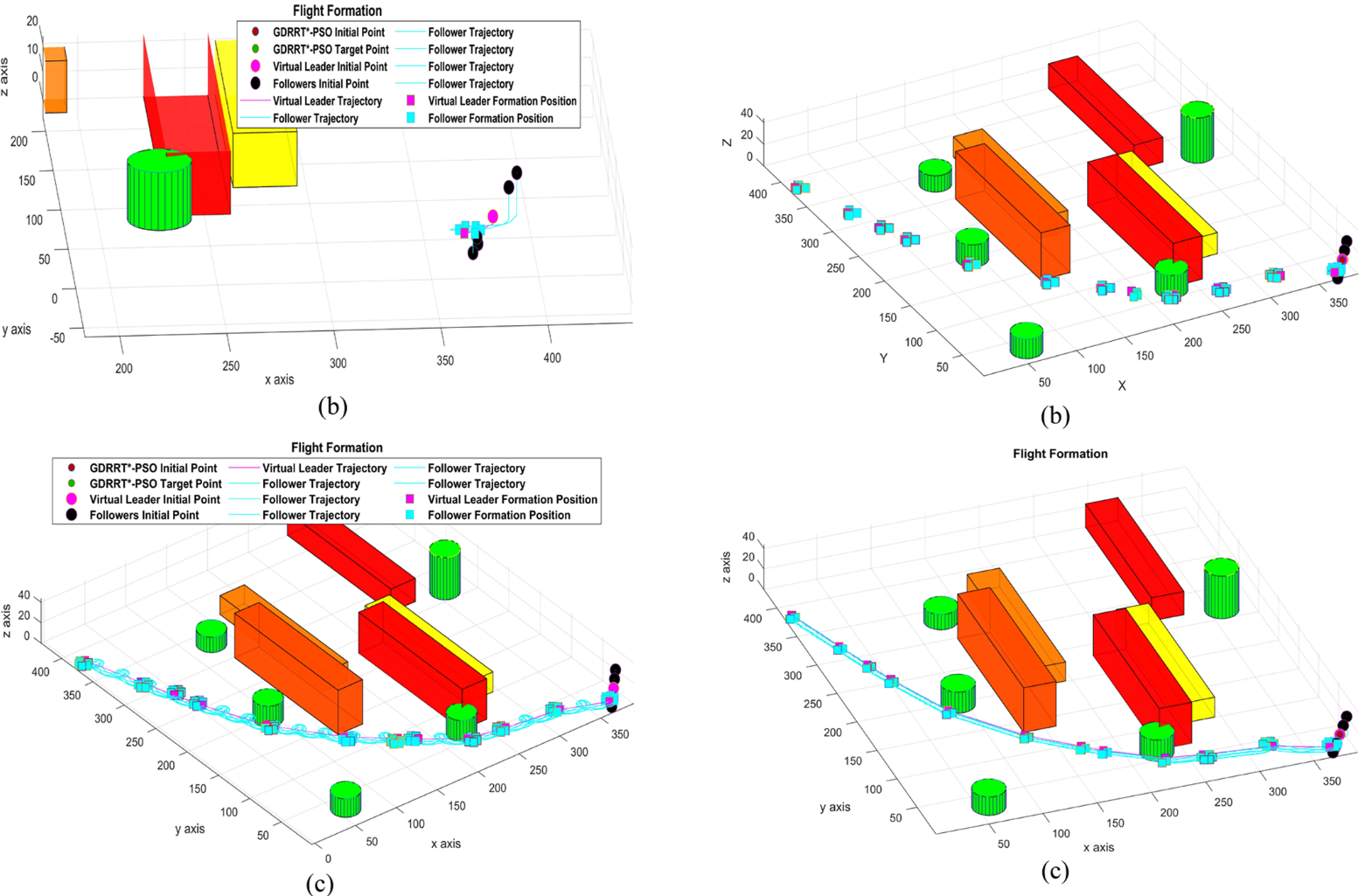
4.結果展示
5.參考文獻
[1] Yildiz B, Aslan M F, Durdu A, et al. Consensus-based virtual leader tracking swarm algorithm with GDRRT*-PSO for path-planning of multiple-UAVs[J]. Swarm and Evolutionary Computation, 2024, 88: 101612.



系統及知識準備)
內存和內存地址、數組的查找算法和排序算法;)
場:河南農業大學(補題))

以pinia為中心的開發模板(監聽watch))








 :使用 Milvus 實現高效圖片查重功能)
的自述)

