色調H:
使用角度度量,取值范圍為0°\~360°,從紅色開始按逆時針方向計算,紅色為0°,綠色為120°,藍色為240°。它們的補色是:黃色為60°,青色為180°,紫色為300°。通過改變H的值,可以選擇不同的顏色
飽和度S:
飽和度S表示顏色接近光譜色的程度。一種顏色可以看成是某種光譜色與白色混合的結果。其中光譜色所占的比例越大,顏色接近光譜色的程度就越高,顏色的飽和度就越高。飽和度越高,顏色就越深而艷,光譜色的白光成分為0,飽和度達到最高。通常取值范圍為0%\~100%,其中0%表示灰色或無色,100%表示純色,通過調整飽和度的值,可以使顏色變得更加鮮艷或者更加灰暗。
明度V:
明度表示顏色明亮的程度,對于光源色,明度值與發光體的光亮度有關;對于物體色,此值和物體的透射比或反射比有關。通常取值范圍為0%(黑)到100%(白),通過調整明度的值,可以使顏色變得更亮或者更暗。
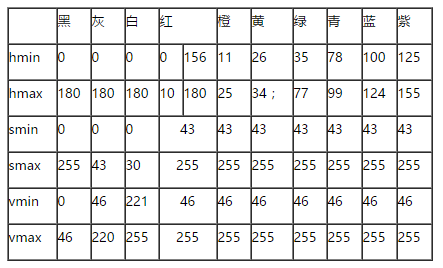
一般對顏色空間的圖像進行有效處理都是在HSV空間進行的,然后對于基本色中對應的HSV分量需要給定一個嚴格的范圍,下面是通過實驗計算的模糊范圍(準確的范圍在網上都沒有給出)。
H: 0— 180
S: 0— 255
V: 0— 255
此處把部分紅色歸為紫色范圍:
為什么有了RGB顏色空間我們還是需要轉換成HSV顏色空間來進行圖像處理呢?
- 符合人類對顏色的感知方式:人類對顏色的感知是基于色調、飽和度和亮度三個維度的,而HSV顏色空間恰好就是通過這三個維度來描述顏色的。因此,使用HSV空間處理圖像可以更直觀地調整顏色和進行色彩平衡等操作,更符合人類的感知習慣。
- 顏色調整更加直觀:在HSV顏色空間中,色調、飽和度和亮度的調整都是直觀的,而在RGB顏色空間中調整顏色不那么直觀。例如,在RGB空間中要調整紅色系的顏色,需要同時調整R、G、B三個通道的數值,而在HSV空間中只需要調整色調和飽和度即可。
- 降維處理有利于計算:在圖像處理中,降維處理可以減少計算的復雜性和計算量。HSV顏色空間相對于RGB顏色空間,減少了兩個維度(紅、綠、藍),這有利于進行一些計算和處理任務,比如色彩分割、匹配等。
因此,在進行圖片顏色識別時,我們會將RGB圖像轉換到HSV顏色空間,然后根據顏色區間來識別目標顏色。



- 正確用法 - 年均收益18%)


)




(C/C++))







機器學習---決策樹和隨機森林)