OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多變量時序預測一鍵對比
目錄
- OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多變量時序預測一鍵對比
- 預測效果
- 基本介紹
- 程序設計
- 參考資料
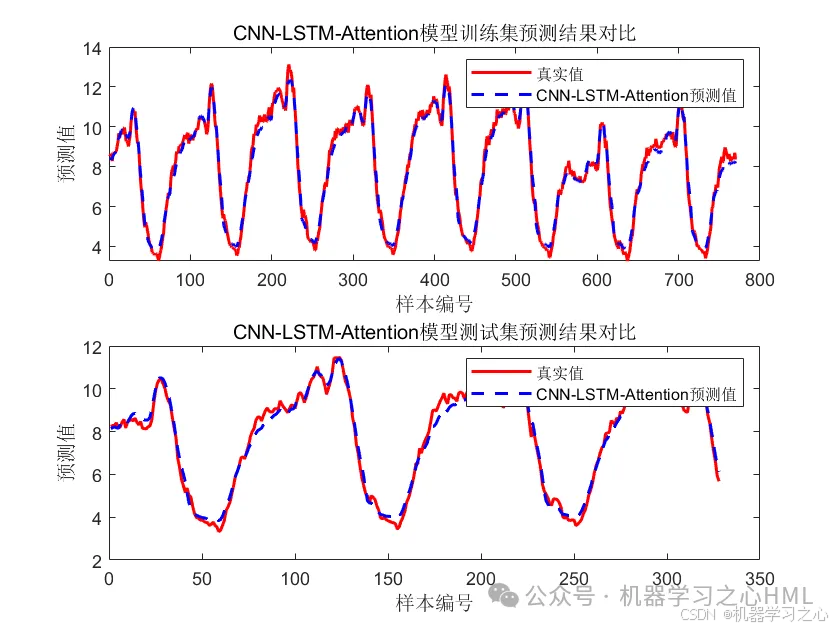
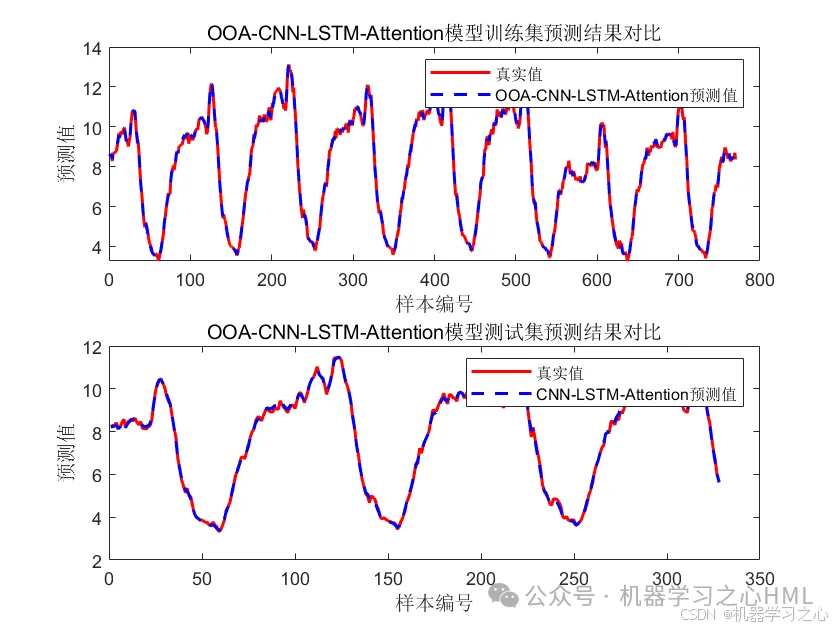
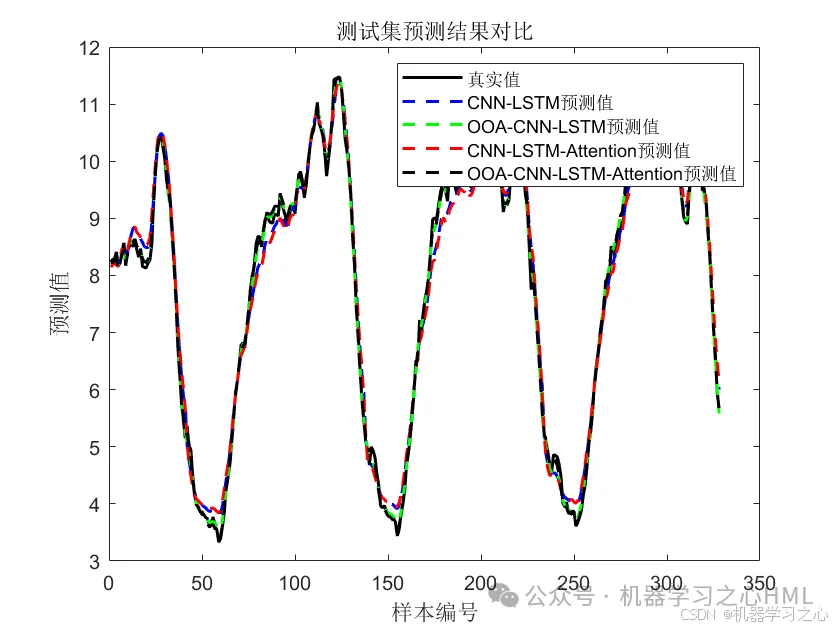
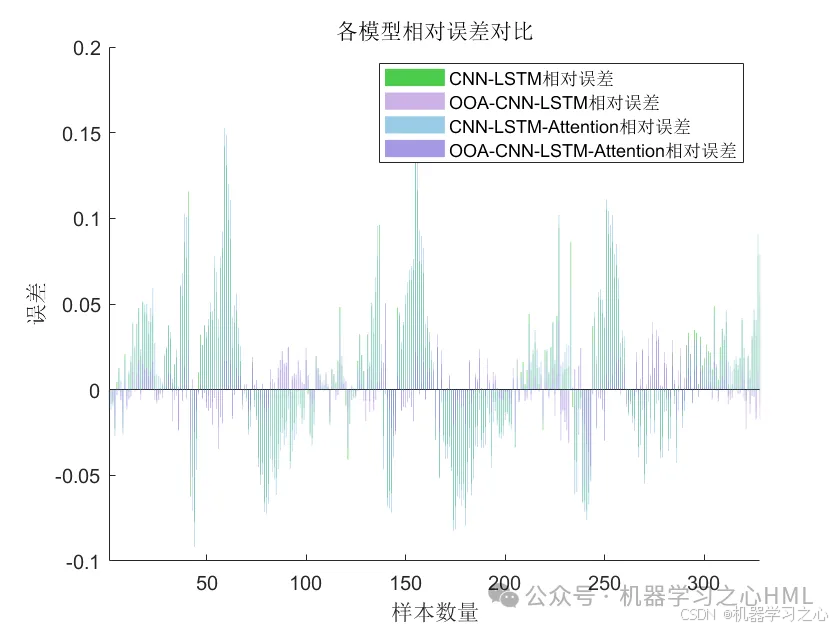
預測效果
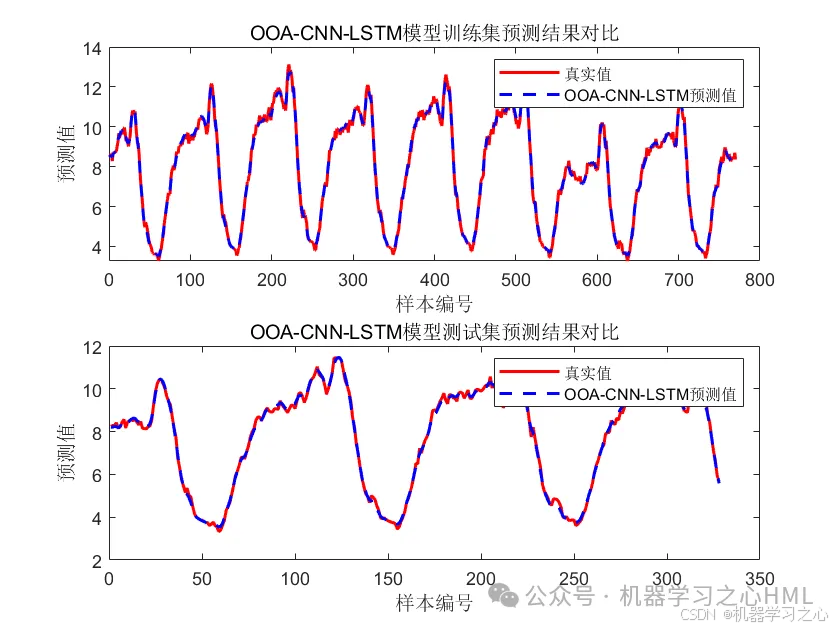
基本介紹
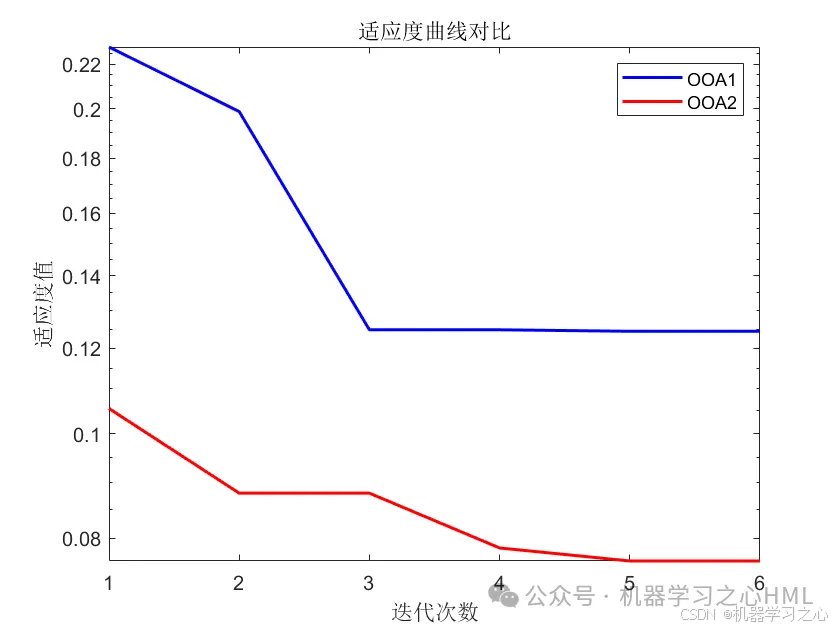
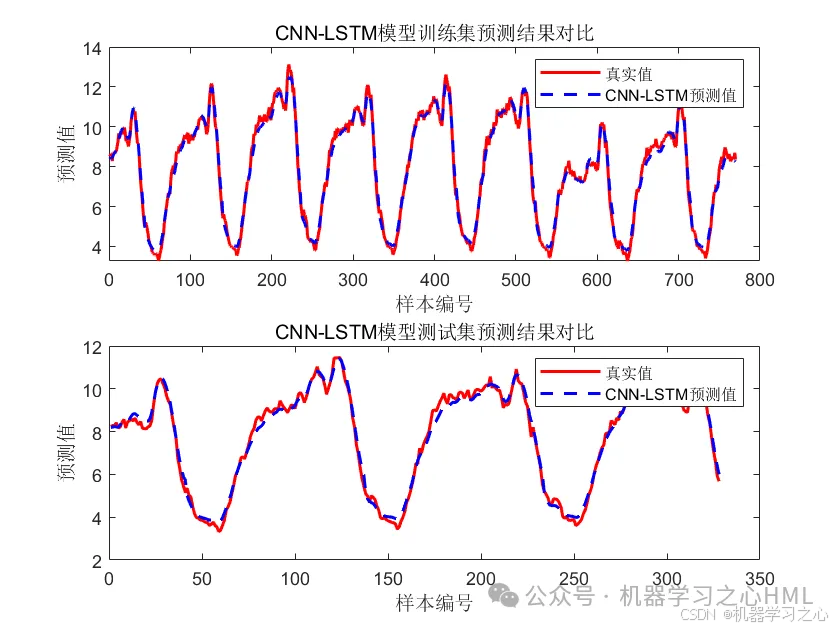
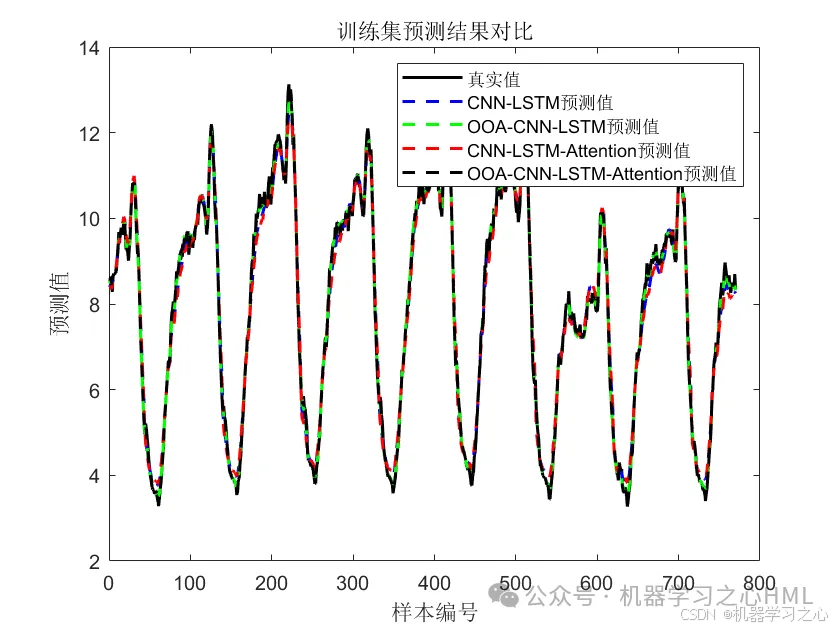
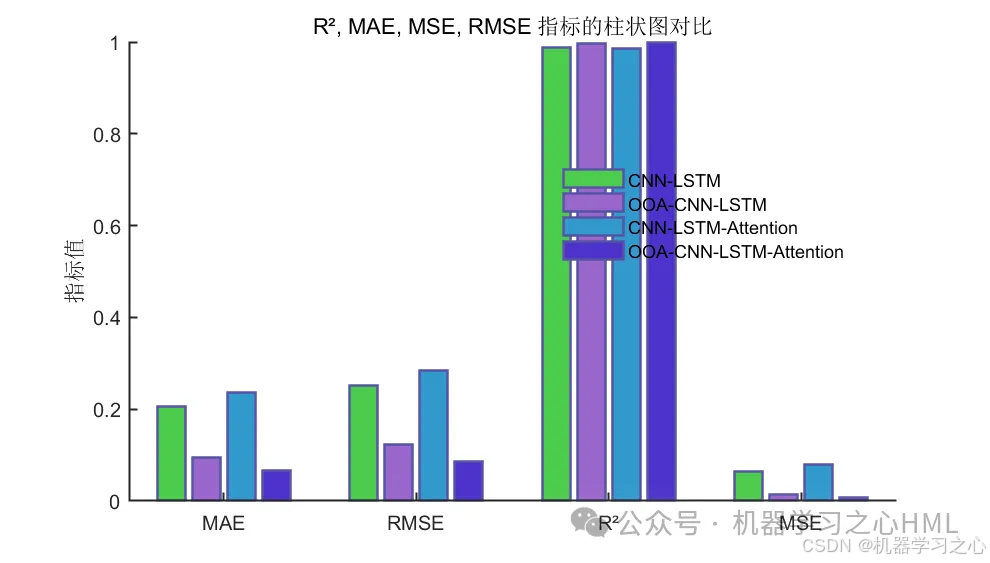
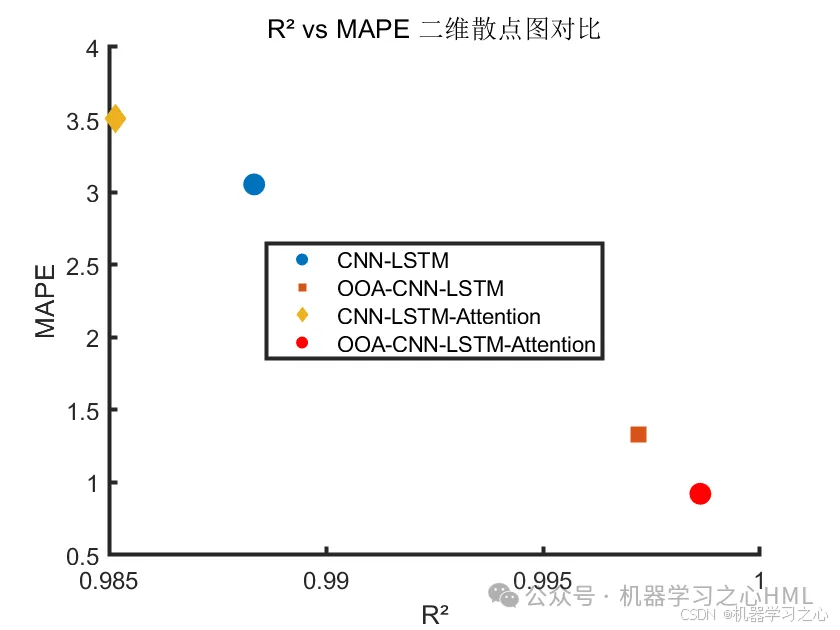
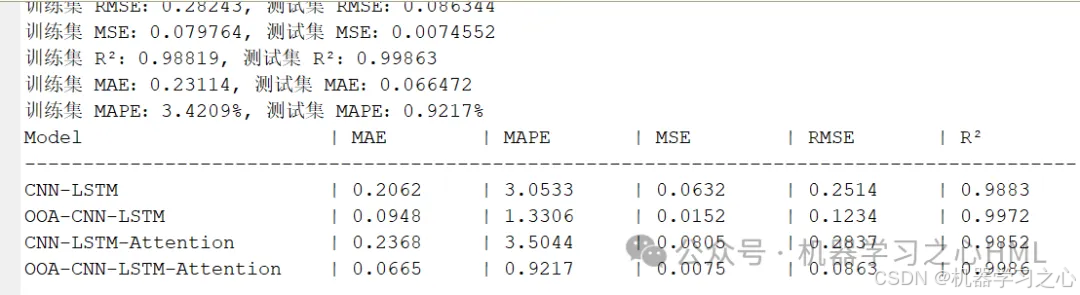
基于OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多變量時序預測一鍵對比(僅運行一個main即可)
Matlab代碼,每個模型的預測結果和組合對比結果都有!
1.無需繁瑣步驟,只需要運行一個main即可一鍵出所有圖像。
2.程序已經調試好,無需更改代碼替換數據集即可運行!!!數據格式為excel!
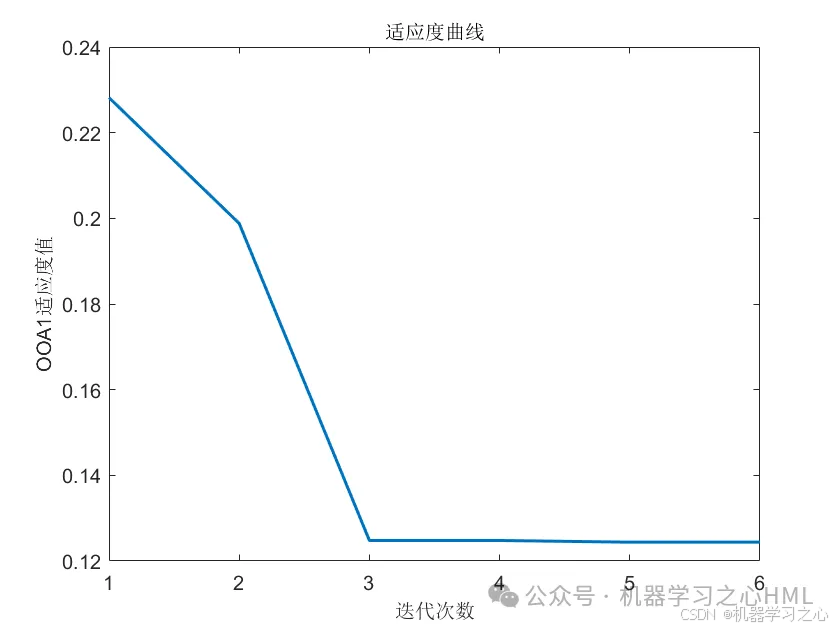
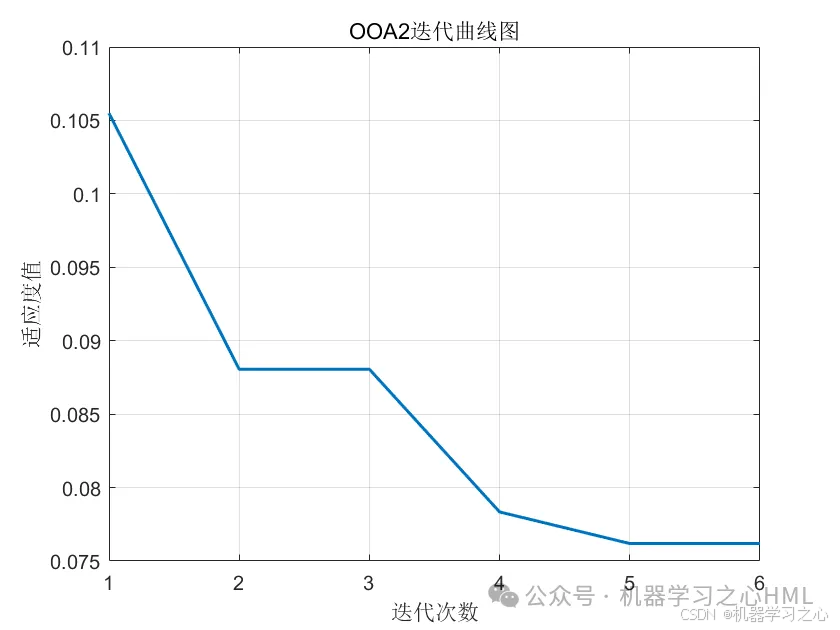
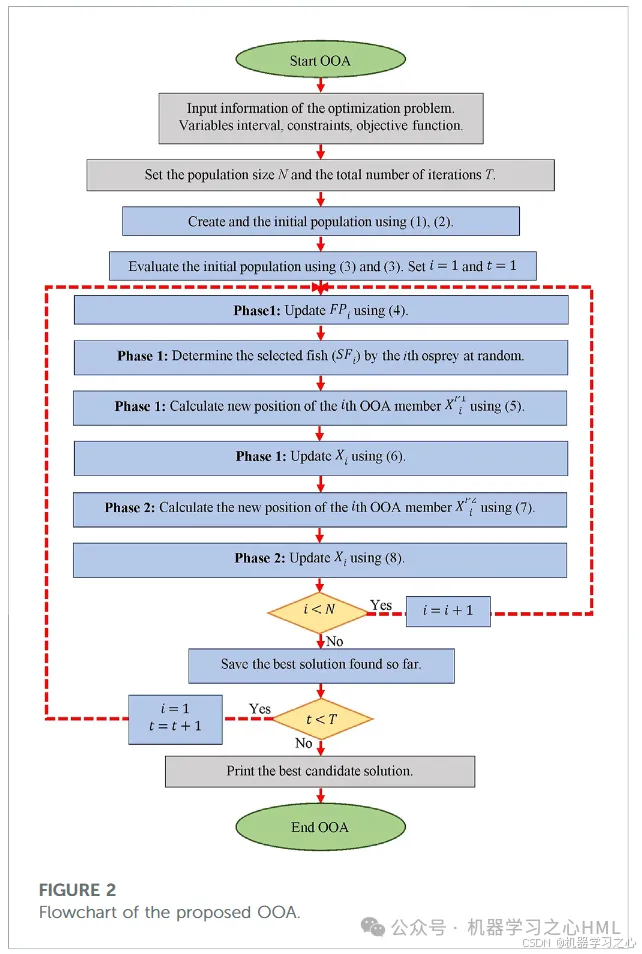
3.OOA優化參數為:隱藏層節點數,學習率,正則化系數。
4.魚鷹優化算法(Osprey optimization algorithm, OOA)是一種新智能優化算法,靈感來源于魚鷹在海上捕食時的策略,2023年發表在ESCI期刊上!
5.運行環境要求MATLAB版本為2023b及其以上。
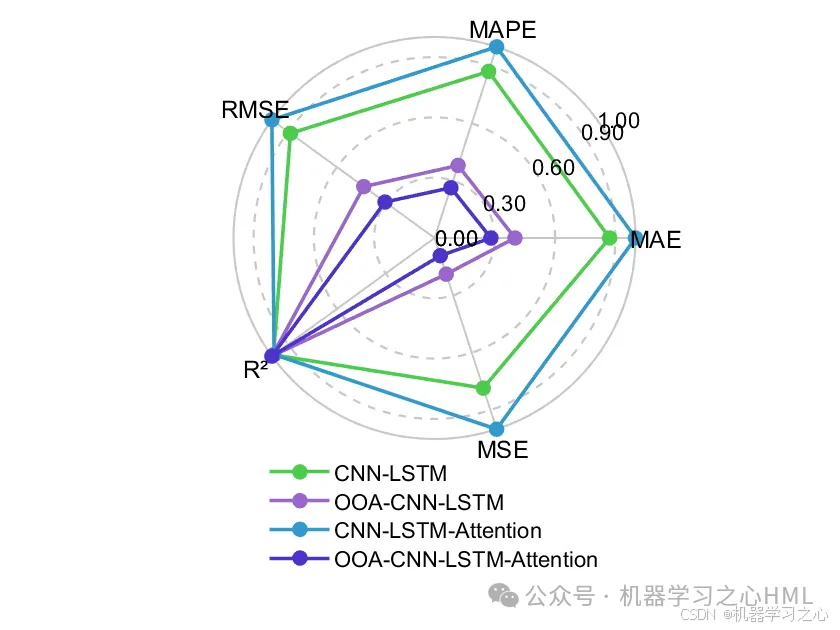
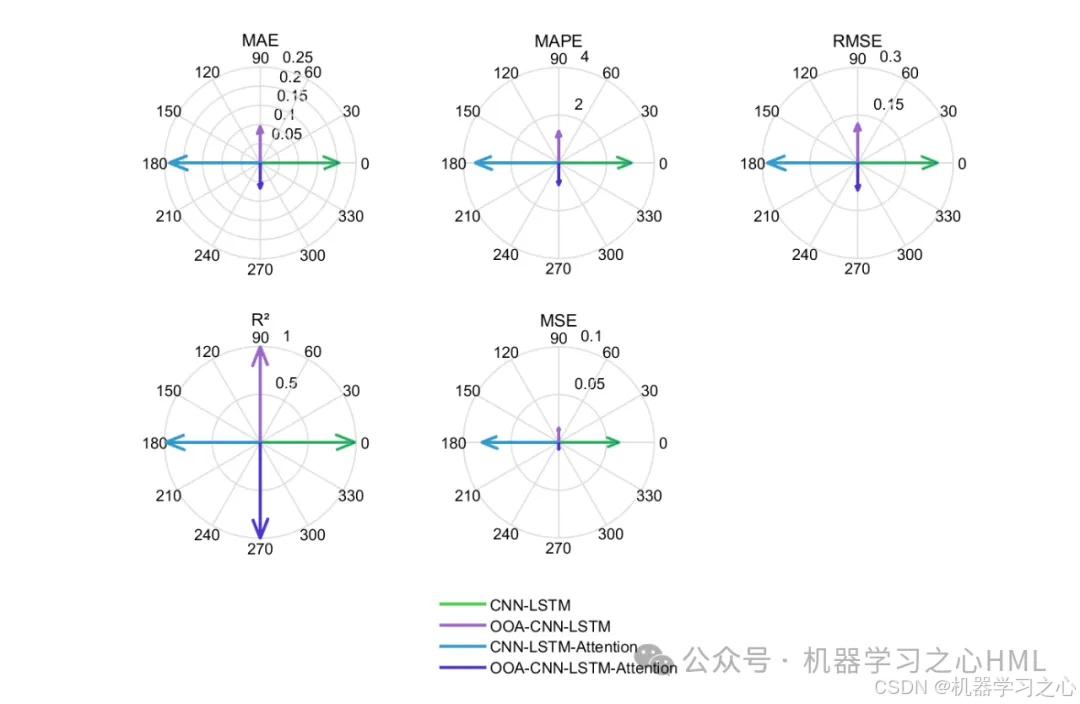
評價指標包括:R2、MAE、MSE、RPD、RMSE等,圖很多
代碼中文注釋清晰,質量極高,贈送測試數據集,可以直接運行源程序。替換你的數據即可用 適合新手小白
程序設計
- 完整代碼私信回復OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多變量時序預測一鍵對比。
%% 清空環境變量
warning off % 關閉報警信息
close all % 關閉開啟的圖窗
clear % 清空變量
clc % 清空命令行%% 導入數據
result = xlsread('數據集.xlsx');%% 數據分析
num_samples = length(result); % 樣本個數
kim = 2; % 延時步長(前面多行歷史數據作為自變量)
zim = 1; % 跨zim個時間點進行預測
nim = size(result, 2) - 1; % 原始數據的特征是數目%% 劃分數據集
for i = 1: num_samples - kim - zim + 1res(i, :) = [reshape(result(i: i + kim - 1 + zim, 1: end - 1)', 1, ...(kim + zim) * nim), result(i + kim + zim - 1, end)];
end%% 數據集分析
outdim = 1; % 最后一列為輸出
num_size = 0.7; % 訓練集占數據集比例
num_train_s = round(num_size * num_samples); % 訓練集樣本個數
f_ = size(res, 2) - outdim; % 輸入特征長度%% 劃分訓練集和測試集
P_train = res(1: num_train_s, 1: f_)';
T_train = res(1: num_train_s, f_ + 1: end)';
M = size(P_train, 2);P_test = res(num_train_s + 1: end, 1: f_)';
T_test = res(num_train_s + 1: end, f_ + 1: end)';
N = size(P_test, 2);%% 數據歸一化
[p_train, ps_input] = mapminmax(P_train, -1, 1);%將訓練集和測試集的數據調整到0到1之間
p_test = mapminmax('apply', P_test, ps_input);[t_train, ps_output] = mapminmax(T_train, -1, 1);% 對測試集數據做歸一化
t_test = mapminmax('apply', T_test, ps_output);%% 數據平鋪
% 將數據平鋪成1維數據只是一種處理方式
% 也可以平鋪成2維數據,以及3維數據,需要修改對應模型結構
% 但是應該始終和輸入層數據結構保持一致
p_train = double(reshape(p_train, f_, 1, 1, M));
p_test = double(reshape(p_test , f_, 1, 1, N));
t_train = double(t_train)';
t_test = double(t_test )';%% 數據格式轉換
for i = 1 : MLp_train{i, 1} = p_train(:, :, 1, i);
endfor i = 1 : NLp_test{i, 1} = p_test( :, :, 1, i);
end參考資料
[1] https://blog.csdn.net/kjm13182345320/article/details/128577926?spm=1001.2014.3001.5501
[2] https://blog.csdn.net/kjm13182345320/article/details/128573597?spm=1001.2014.3001.5501



(C/C++))







機器學習---決策樹和隨機森林)





)

