一、焦平面
想到焦平面,很多人不由自主就想到不就是焦點所在的垂直于光軸的平面嗎?其實其背后隱藏這更多的東西。

1)焦點不止一個
對于一般拍攝場景來說,光通過一個凸透鏡,匯聚不到一個點,越靠近中軸線的光束聚焦得越遠,越靠近透鏡邊緣的光聚焦得越近,這是光學誤差的一種,叫球差,如下圖所示。只在理想情況下,光從無限遠匯聚到凸透鏡,才會匯聚一點。
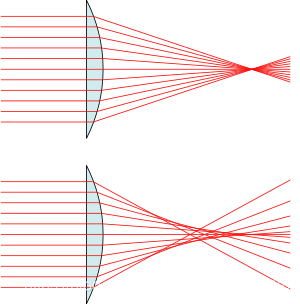
第一焦平面:過第一焦點且垂直于系統主光軸的平面稱第一焦平面,又稱前焦面或物方焦面,一般為邊緣光束匯聚的焦點;
第二焦平面:過第二焦點且垂直于系統主光軸的平面稱第二焦平面,又稱后焦面或象方焦面,平面一般為接近凸透鏡中心部分的光匯集的焦點。
工業相機鏡頭是由多片薄的凸透鏡組成,其焦距是鏡頭的中心點到膠平面(膠片或CCD)上所形成的清晰影像之間的距離,也就是下文的像距。
工業相機鏡頭焦距常規的有6mm, 8mm, 12mm,16mm,25mm ,35mm , 50mm,75mm。其選型公式為:
焦距(f)=工作距離(WD)*CCD靶面型號尺寸(V或者H)/視場大小或者物體高度(FOV)
所以在WD和CCD尺寸確定的情況下,焦距數值小,視角大,所觀察的范圍也大;焦距數值大,視角小,觀察范圍小。
2)焦平面或者是焦距和什么相關?
根據公式:
1/u(物距)+1/v(像距)=1/f(透鏡焦距)
此公式不太適用于工業相機成像,只適用于理想情況單凸透鏡成像,所以要區分相機的焦距與單片凸透鏡的焦距,工業相機焦距等于像距,都在感光區,1/物距基本忽略不計。
3)對焦和變焦
對焦通常指調整鏡片組和底片(傳感器平面)之間的距離,從而使被攝物在CCD/CMOS上成的像清晰。
變焦就是改變鏡頭的焦距(準確說是像距),以改變拍攝的視角,也就是通常所說的把被攝體拉近或推遠。例如18-55mm和70-200mm鏡頭就是典型的變焦鏡頭。焦距越長,視角越窄。
二、像平面
像平面是指成像平面,可以理解為用膠片相機拍攝,那個膠卷就是像平面,要是用數碼相機拍攝,那么像平面就是CCD等感光元件。所以對于我們來說,像平面是已經固定的,根據上文,像距與焦距相同。
三、彌散圓
物點成像時,由于像差,其成像光束不能會聚于一點,上面解釋了,所以會在像平面/CCD上形成一個擴散的圓形投影,成為彌散圓。當使點光源經過鏡頭在像平面成像,如果此時保持鏡頭與像平面距離不變,沿光軸方向前后移動點光源,則像平面上成的像就會成為有一定直徑的圓形,就叫彌散圓。
彌散圓大小取決于鏡頭孔徑(光圈)和點光源偏離程度(物距)。
通常情況下,肉眼分辨率為二千分之一至五千分之一。人眼在明視距離(眼睛正前方30厘米)能夠分辨的最小的物體大約為0.125mm。所以,彌散圓放大在7寸照片(這是個常用尺寸)也只能是0.125mm以內,也就是圖像對角線長度的1/1730左右,所以,拍攝的圖片上看不到彌散圓。
四、光圈
光圈是一個用來控制光線通進入鏡頭的裝置,它通常是在鏡頭內,對于已經制造好的鏡頭,我們不可以隨意的改變鏡頭的鏡頭,但是可以通過在鏡頭內部加入多邊形或者圓形,并且面積可變的孔徑光柵來達到控制鏡頭通光量。
這點一般對于工業相機來講不適用,因為工業相機光圈已經是固定好的,一般不支持增加,但可以手動調整。
光圈(Aperture)在工業相機鏡頭中是由幾片極薄的金屬片組成,中間能通過光線。通過改變孔的大小來控制進入工業鏡頭的光線量。光圈開得越大,通過工業鏡頭進入的光量也就越多。光圈的值通常用f來表示。

五、景深(Depth of Field,DOF)
景深是指在物體前后一定距離內,其影像仍然清晰的范圍。景深隨鏡頭的光圈值、焦距、拍攝距離而變化,光圈越大,景深越小,光圈越小,景深越大。焦距越長,景深越小,焦距越短,景深越大。距離拍攝物體越近時,景深越小,拍攝距離越遠,景深越大。
六、分辨率
相機每次采集圖像的像素點數(Pixels),對于工業數字相機一般是直接與光電傳感器的像元數對應的。目前工業數字相機像元尺寸一般為3μm-10μm,一般像元尺寸越小,制造難度越大,圖像質量也越不容易提高。分辨率影響采集圖像的質量,在對同樣大的視場(景物范圍)成像時,分辨率越高,對細節的展示越明顯。
像素深度:每位像素數據的位數,常見的是8bit,10bit,12bit。分辨率和像素深度共同決定了圖像的大小。例如對于像素深度為8bit的500萬像素,則整張圖片應該有500萬*8/1024/1024=37M。
七、接口
相機與鏡頭的連接方式包括C、CS、F、V、T2、Leica、M42x1 M75x0.75。接口類型的不同和鏡頭性能及質量并無直接關系,只是接口方式的不同,一般可以也找到各種常用接口之間的轉接口。
C接口和CS接口是工業攝像頭最常見的國際標準接口,為1英寸-32UN英制螺紋連接口,C型接口和CS型接口的螺紋連接是一樣的,區別在于C型接口的后截距為17.5mm,CS型接口的后截距為12.5mm。所以CS型接口的攝像頭可以和C口及CS口的鏡頭連接使用,只是使用C口鏡頭時需要加一個5mm的接圈;C型接口的攝像頭不能用CS口的鏡頭。
F接口鏡頭是尼康鏡頭的接口標準,所以又稱尼康口,也是工業攝像頭中常用的類型,一般攝像頭靶面大于1英寸時需用F口的鏡頭。
V接口鏡頭是著名的專業鏡頭品牌施奈德鏡頭所主要使用的標準,一般也用于攝像頭靶面較大或特殊用途的鏡頭。
在光學系統中,最后一個光學鏡片表面的頂點到像面的距離稱為后截距。
八、靶面尺寸
圖像傳感器的感光部分的大小。 常見的靶面有1/4’’、1/3’’、1/2’’、2/3’’、1’'等幾種。
尺寸明細可見下方鏈接,非常細。
靶面尺寸和鏡頭焦距配套對應的視場角
鏡頭:
具體鏡頭概念可見:
鏡頭基礎知識
共軛鏡頭:
這個概念聽上去復雜,其實很簡單,分為兩種,有限共軛鏡頭和無窮共軛鏡頭。有限共軛鏡頭:像點對應的物點只能在有限的距離內,工業微距鏡頭大多是有限共軛鏡頭。
無窮共軛鏡頭是指:像點對應的物點在無窮遠處(可以理解為很遠處)。手機攝像頭、普通鏡頭都是無窮共軛鏡頭。
藍光和紅光的區別
藍光由于波長更短,衍射效應更弱,因此刻畫細節的能力更強,拍攝微小的物體,藍光是首選。黑白CCD對紅光更敏感,但其實這優勢并不大,或許在需要盡量減輕環境光干擾的時候,有一點作用。紅色光源通常要比藍色光源便宜。
曝光和增益
曝光(Exposure)是圖像傳感器進行感光的過程,在曝光過程中,CCD/CMOS收集光子并轉換成電荷;曝光結束后,CCD/CMOS通過一定的方式將電荷移出。從光曝光對照片質量的影響很大,如果曝光過度,則照片過亮,失去圖像細節;如果曝光不足,則照片過暗,同樣會失去圖像細節。控制曝光就是控制總的光通量,也就是曝光過程中到達CCD/CMOS表面的光子的總和。
增益是指經過雙采樣之后的模擬信號的放大增益量,通常增益值越高,相機感應光的能力越強,相應的噪點也越多,畫質也越差。
曝光和增益是直接控制傳感器(CCD/CMOS)上讀出來的數據,是要優先調節的,以調節曝光時間為主。在不過曝的前提下,增加曝光時間可以增加信噪比,使圖像清晰。
進行優化以及選擇)


深入理解四大坐標系與其變換關系)
和flatten())

 —— 畸變校正)

)
詳解—— Camera_calibration_multi_image.hdev)


——LeNet卷積神經網絡結構)
主要參數詳述)



—— xyz_attrib_to_object_model_3d)

——AlexNet卷積神經網絡結構)