IMU / 陀螺儀模塊
- 一、概述
- 二、注意參數
- 2.1 陀螺儀芯片標準(MPU6050)
- 2.2 參數說明
- 三、IMU模式使用注意事項
- 3.1 IMU模塊安裝注意事項
- 3.2 為什么IMU要安裝在機器中心位置
- 四、常見陀螺儀芯片品牌
一、概述
??IMU全稱為慣性測量單元,可以通過測量物體在三維空間內的加速度和角速度,來獲取物體的運動姿態和位置信息。IMU模塊通常由三個部分組成:加速度計、陀螺儀和磁力計。這些傳感器可以通過處理器進行數據處理和濾波,從而獲得更加準確的數據。
??加速度計是一種測量物體加速度的傳感器,它基于牛頓力學定律中的質量和力的關系。它可以測量物體在三個軸向上的加速度,包括x、y和z軸。在IMU中,加速度計用于測量設備的線性加速度和位置變化。
??陀螺儀是一種測量物體角速度的傳感器。它可以測量物體在三個軸向上的旋轉速率,包括x、y和z軸。在IMU中,陀螺儀被用來測量設備的角度變化和方向。
??磁力計是一種測量磁場的傳感器。它可以測量物體在三個軸向上的磁場強度,包括x、y和z軸。在IMU中,磁力計用于檢測設備的方向和位置,尤其是在地球磁場的作用下。
二、注意參數
2.1 陀螺儀芯片標準(MPU6050)
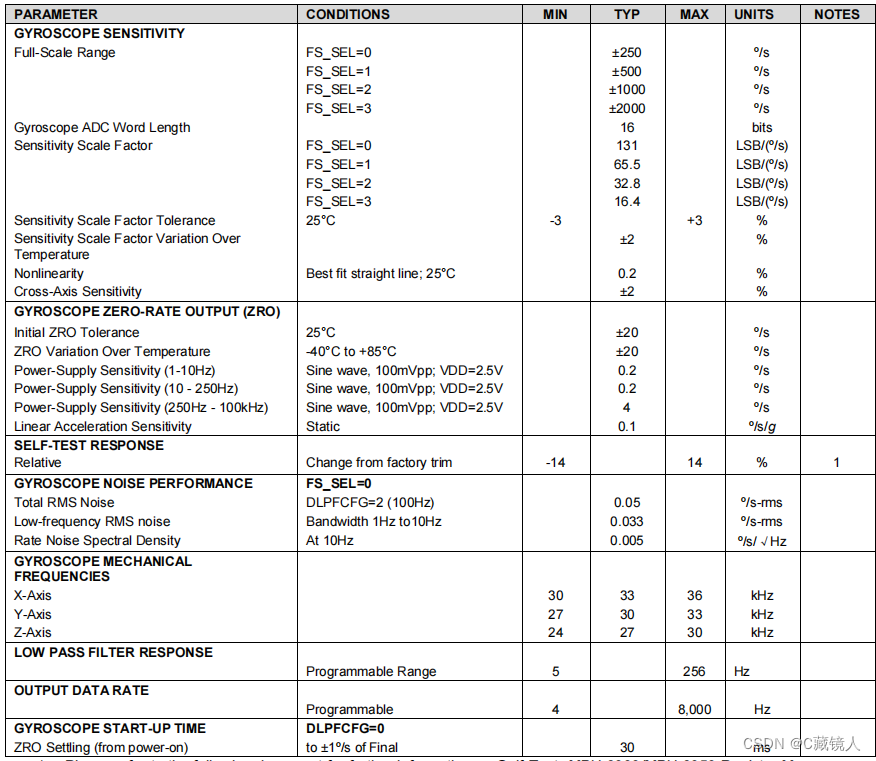
- Gyro參數標準
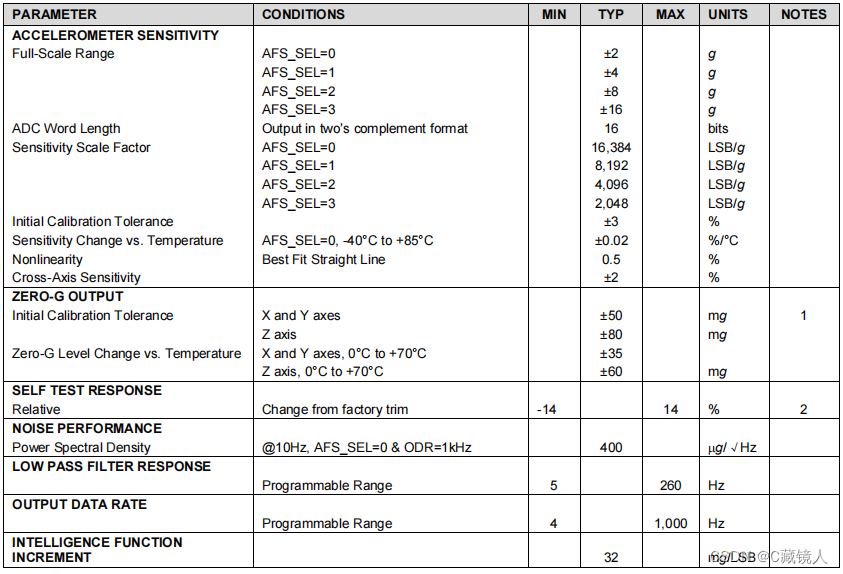
- Accelerometer參數標準
2.2 參數說明
- 分辨率:分辨率是指陀螺儀芯片能夠測量的最小角度。分辨率越高,測量的精度就越高。
- 量程:量程是指陀螺儀芯片能夠測量的最大角度范圍。量程越大,應用范圍就越廣。
- 頻率響應:頻率響應是指陀螺儀芯片可測量的最高頻率。頻率響應越高,測量的反應速度就越快。
- 零偏:指在靜態狀態下,陀螺儀輸出的角速度值,其實際值與理論值之間的偏差。該值通常會因為加速度的影響而發生變化。
- 陀螺儀零偏誤差:陀螺儀輸出值在沒有物理旋轉時的平均偏差。通常以度/秒為單位
- 陀螺儀非線性誤差:陀螺儀輸出值與物理旋轉速度之間的非線性誤差。通常以百分比表示。
- 加速度計非線性誤差:加速度計輸出值與物理加速度之間的非線性誤差。通常以百分比表示
- 動態響應:陀螺儀芯片在運動狀態下的響應速度和準確度。
??主要體現在動態性能和帶寬兩個方面,動態性能越好,表示芯片能夠快速響應運動狀態的變化,帶寬越寬,表示芯片能夠處理更高頻率的運動信號。 - 溫漂:陀螺儀芯片在溫度變化的情況下,輸出信號的漂移程度。溫漂越小,表示芯片的精度和穩定性在不同溫度下都能得到保證。
- 頻率范圍:陀螺儀芯片能夠測量的旋轉頻率范圍。頻率范圍越廣,表示芯片能夠應對更廣泛的測量需求。
- 同軸性:陀螺儀芯片的同軸性指的是其對旋轉軸的測量精度。同軸性越好,表示芯片能夠準確測量旋轉事件。
- 穩定性:穩定性是指陀螺儀芯片輸出信號的穩定程度。穩定性越好,測量的準確性就越高。
三、IMU模式使用注意事項
3.1 IMU模塊安裝注意事項
-
確定IMU模塊的安裝方向:IMU測量姿態和運動的結果與IMU模塊的安裝方向有關。通常情況下,IMU模塊需要安裝在機器人的中心位置,且安裝方向需要與機器人的對稱軸對齊。
-
避免機械振動:IMU模塊對機械振動比較敏感,因此需要避免在振動頻繁的環境中安裝。此外,IMU模塊需要固定好,以保證在移動過程中不會發生移位。
-
避免磁場干擾:IMU模塊測量姿態和運動也會受到磁場的影響,因此需要避開具有強磁場的區域。同時,IMU模塊需要與其他磁性傳感器隔離,以避免相互干擾。
-
校準IMU模塊:在安裝完IMU模塊后,需要進行校準。校準包括零偏校準、刻度因數校準、磁場干擾校準等,可以通過專用軟件或者自行編寫程序實現。
-
保護IMU模塊:IMU模塊需要避免受到機械撞擊或者水、油等液體的浸泡。在不使用時,建議將IMU模塊存放在防潮箱內,以保證長期穩定的性能。
3.2 為什么IMU要安裝在機器中心位置
??IMU(慣性測量單元)是一種用于測量機器人姿態、加速度和角速度的傳感器。IMU的安裝位置可以影響機器人精確的姿態測量、運動控制以及導航等功能。將IMU安裝在機器人的中心位置,可以最大限度地減少機器人的旋轉慣量和重心偏移等因素對姿態測量的影響,從而提高機器人的準確性和穩定性。
??此外,將IMU安裝在機器人中心位置還有助于減少機器人因外部干擾(如振動、震動等)而產生的姿態誤差。因為在機器人中心位置,IMU可以感受到機器人整體的運動狀態,更好地抵消外部干擾所引起的測量誤差。
??綜上所述,將IMU安裝在機器人的中心位置,可以最大程度地提高機器人的姿態測量精度和穩定性。
四、常見陀螺儀芯片品牌
美國ADI亞德諾半導體,ADIS16480等
ST意法半導體、Invensence 應美勝、Bosh 博世、艾普森


和Sigmoid激活函數)



)

)




)



(第15講))

