構建VREP和MATLAB聯合仿真實驗平臺,控制機械臂末端按照固定軌跡移動。主要工作如下:
(1)solidworks構建機械臂模型;
(2)將solidworks中構建的模型導入VREP中建立機械臂的多體動力學模型;
(3)建立VREP和MATLAB之間的通信;
(4)構建DH坐標系,建立機械臂的正運動學模型;
(5)求解機械臂的逆運動學模型;
(6)規劃末端執行器運動軌跡;
(7)編寫MATLAB控制程序,控制機械臂按規劃軌跡運動;
(8)撰寫報告。
成果如下:
DH:

vrep模型:
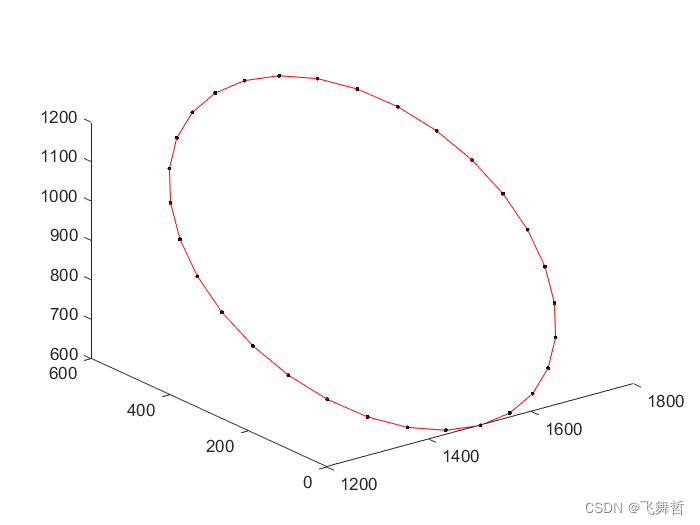
逆解和軌跡規劃:

技術交流郵箱:3531225003@qq.com,有問題請添加郵箱對應的企鵝?
)

)




)



(第15講))



)



