在“雙碳”戰略目標的推動下,綜合能源系統(Integrated Energy System, IES)已成為實現能源結構優化與碳排放控制的重要途徑。本文以光伏、風電、燃氣—電熱聯產(CHP)、燃氣鍋爐、電鍋爐、電儲能以及碳捕集(CCS)設備構成的多能互補系統為研究對象,建立了考慮電—熱耦合及碳捕集約束的日內優化調度模型。模型以系統運行總成本最小為目標函數,成本涵蓋購電、購氣、設備運維與碳交易,約束條件包括電功率與熱功率平衡、設備容量邊界及碳排放捕集比例。基于 Matlab 平臺,利用 YALMIP 建模工具和 CPLEX 求解器對典型日24小時分時電價情景進行了仿真分析。結果表明:通過合理調度光伏、風電、CHP、儲能及CCS等設備,可有效降低系統運行成本與碳排放水平,實現經濟性與低碳性的雙重優化。本研究為綜合能源系統在雙碳背景下的低碳運行與規劃提供了理論參考與方法支撐。
作者:張家梁(改進)
引言
近年來,隨著氣候變化和能源危機的加劇,我國提出了“碳達峰、碳中和”的“雙碳”戰略目標。實現能源系統的清潔低碳轉型已成為能源領域的核心任務。綜合能源系統(Integrated Energy System, IES)因能夠實現電、熱、氣等多種能源的協調優化與互補利用,被認為是推動能源轉型和碳減排的重要技術途徑。
當前,光伏與風電等可再生能源快速發展,但其波動性和間歇性給電網安全與經濟運行帶來挑戰。同時,傳統燃氣設備仍在能源供應中占有重要地位,如何在保證能源供需平衡的前提下兼顧經濟性與低碳性,成為亟待解決的問題。碳捕集與儲能等技術的引入為系統低碳運行提供了新的思路,但同時也增加了系統運行的復雜性和優化難度。
已有研究主要集中在綜合能源系統的能量管理策略、分時電價下的經濟調度、以及低碳約束下的運行優化。例如,部分學者研究了風光儲多能互補系統的經濟性提升,另一些研究則探索了碳排放配額和碳交易對系統運行的影響。然而,現有研究多以經濟目標為主,對“雙碳”背景下碳捕集約束、分時電價機制和綜合優化的系統性分析仍然不足。
針對上述問題,本文以含光伏、風電、CHP、燃氣鍋爐、電鍋爐、儲能與碳捕集的綜合能源系統為研究對象,建立了考慮電—熱耦合與碳捕集約束的日內優化調度模型。本文的主要貢獻包括:
(1)構建了綜合考慮購電、購氣、運維及碳交易成本的優化目標函數;
(2)引入碳捕集約束與分時電價機制,增強了模型的低碳性與實際適用性;
(3)基于 Matlab/YALMIP/CPLEX 平臺,對典型日24小時情景進行了算例仿真,驗證了模型在降低運行成本與碳排放方面的有效性。
系統架構
1.系統概述
本文研究的綜合能源系統由**光伏(PV)、風電(WP)、燃氣—電熱聯產機組(CHP)、燃氣鍋爐(GB)、電鍋爐(EB)、電儲能(EES)以及碳捕集裝置(CCS)**構成。系統主要特點如下:
可再生能源接入:光伏與風電作為主要的清潔電源,能夠顯著降低化石能源消耗,但存在波動性與間歇性。
常規燃氣設備:CHP 在保證供熱的同時兼顧發電,GB 提供靈活的熱能補償,EB 則利用低谷電價實現電熱轉化。
儲能裝置:電儲能系統通過削峰填谷、能量搬移和備用調節,增強系統的靈活性和穩定性。
碳捕集裝置:CCS 對 CHP 和 GB 燃燒產生的 CO? 進行捕集處理,以滿足雙碳目標下的減排要求。
外部能源市場:系統與電網和天然氣管網相連,可根據分時電價與氣價進行購電購氣,參與碳配額和碳交易市場。
在優化模型中,系統以 24小時分時電價場景為典型日,建立 “電功率平衡 + 熱功率平衡 + 碳排放約束” 的統一調度框架。目標是在滿足能源供需的前提下,實現運行成本最小化和碳排放約束的最優平衡。
2.系統流程圖
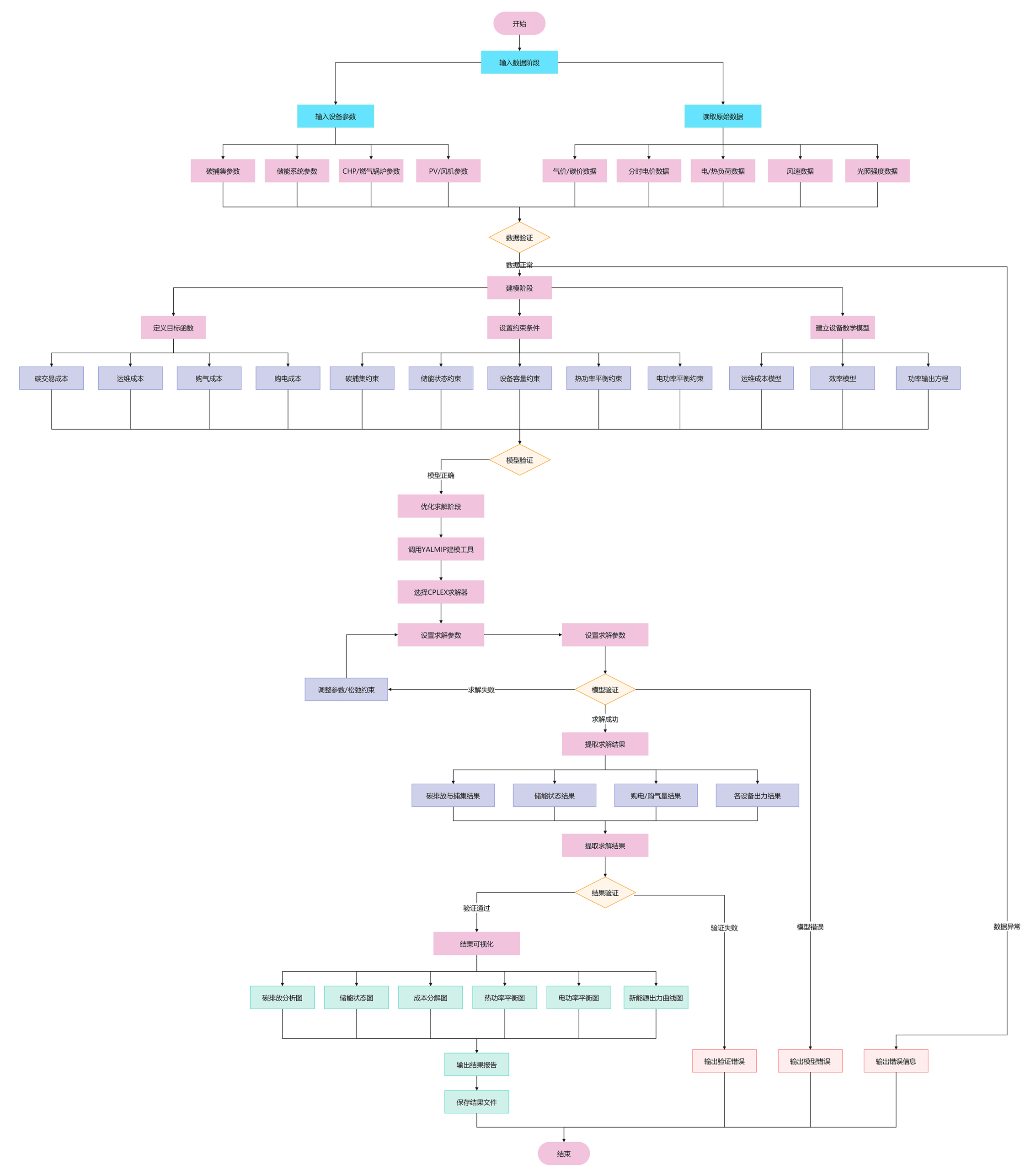
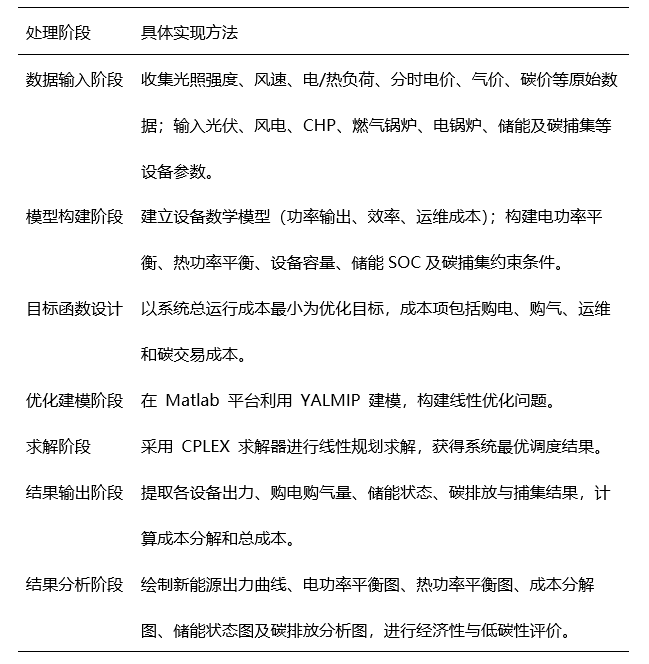
研究方法
本文基于 Matlab 平臺,利用 YALMIP 建模和 CPLEX 求解器,建立包含光伏、風電、CHP、儲能及碳捕集的綜合能源系統優化模型,在分時電價與雙碳約束下實現24小時日內低碳優化調度。
實驗結果
實驗結果表明,綜合能源系統在雙碳目標與分時電價約束下,通過光伏、風電、CHP、儲能及碳捕集的協調優化調度,實現了供需平衡,有效降低了運行成本并減少碳排放。
實驗結果
運行Min_cost.m
圖1 光伏與風電日出力曲線
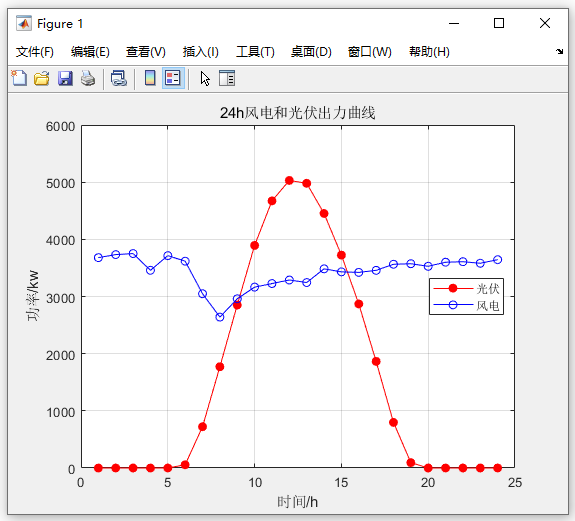
分析:光伏出力呈現明顯的中午峰值特征,而風電出力相對平穩,僅在早晨和中午出現小幅波動。
圖2 電功率收支平衡圖

分析:各類電源與負荷在24小時內實現平衡,外購電與CHP在高峰時段承擔主要供給,儲能則發揮削峰填谷作用。
圖3 熱功率收支平衡圖
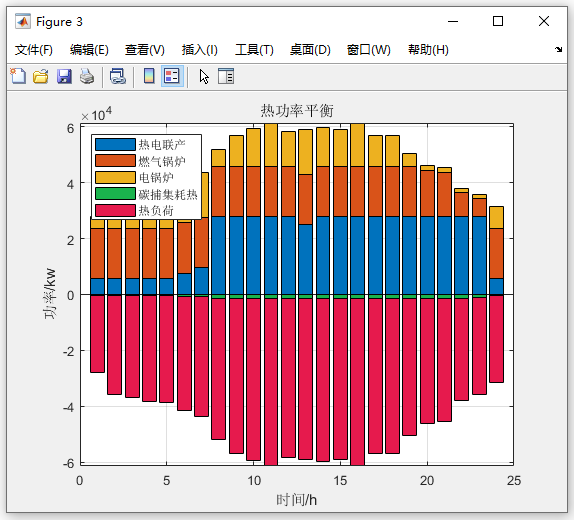
分析:CHP和燃氣鍋爐共同滿足熱負荷需求,電鍋爐在低谷時段補充供熱,碳捕集設備消耗部分熱能。
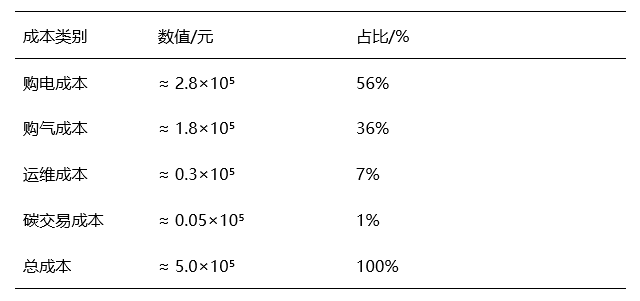
圖4 系統運行成本構成
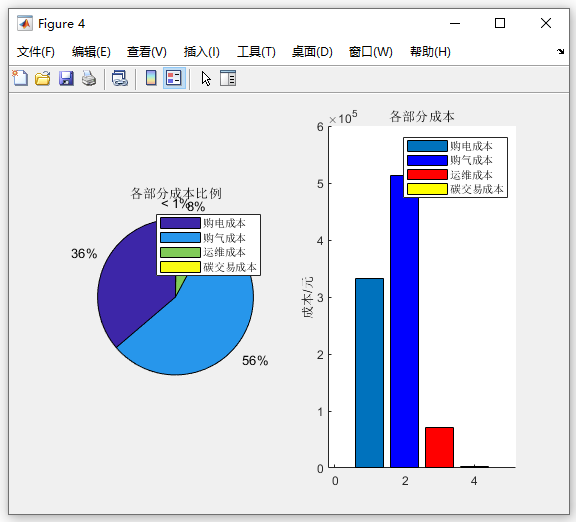
分析:系統總成本主要由購電與購氣成本構成,占比超過九成,運維成本和碳交易成本占比較低。
系統實現
本系統完全基于MATLAB平臺開發,主要集成以下腳本與模塊:

研究結論
本研究表明,所提出的無人機編隊控制與路徑規劃方法能夠使群體在運行過程中迅速達到并保持高有序度,整體表現出良好的收斂性與穩定性;多數無人機對之間的距離處于安全閾值之上,但在部分時段仍存在接近或低于警戒值的潛在碰撞風險,其中 UAV4 與 UAV5 的波動相對較大;平均誤差快速下降并在零附近波動,驗證了控制算法的有效性,同時局部誤差波動與距離風險區相呼應;在狹窄通道實驗中,無人機編隊實現了自適應的收縮—擴展過程,能夠在復雜環境中保持緊湊有序并順利通過,最終恢復至分散狀態,充分證明了該方法在穩定性、安全性和魯棒性方面的優越性。
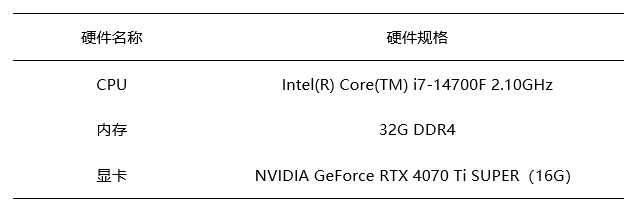
實驗環境
硬件配置如表:實驗所用硬件平臺為惠普(HP)暗影精靈10臺式機整機,運行 Windows 11 64 位操作系統,作為模型訓練與測試的主要計算平臺,能夠良好支持Matlab的開發需求。
官方聲明
實驗環境真實性與合規性聲明:
本研究所使用的硬件與軟件環境均為真實可復現的配置,未采用虛構實驗平臺或虛擬模擬環境。實驗平臺為作者自主購買的惠普(HP)暗影精靈 10 臺式整機,具體硬件參數詳見表。軟件環境涵蓋操作系統、開發工具、深度學習框架、MATLAB工具等,具體配置詳見表,所有軟件組件均來源于官方渠道或開源社區,并按照其許可協議合法安裝與使用。
研究過程中嚴格遵循學術誠信和實驗可復現性要求,確保所有實驗數據、訓練過程與結果均可在相同環境下被重復驗證,符合科研規范與工程實踐標準。
版權聲明:
本算法改進中涉及的文字、圖片、表格、程序代碼及實驗數據,除特別注明外,均由7zcode.張家梁獨立完成。未經7zcode官方書面許可,任何單位或個人不得擅自復制、傳播、修改、轉發或用于商業用途。如需引用本研究內容,請遵循學術規范,注明出處,并不得歪曲或誤用相關結論。
本研究所使用的第三方開源工具、框架及數據資源均已在文中明確標注,并嚴格遵守其相應的開源許可協議。使用過程中無違反知識產權相關法規,且全部用于非商業性學術研究用途。
 用戶手冊)


)







![[手寫系列]Go手寫db — — 第三版(實現分組、排序、聚合函數等)](http://pic.xiahunao.cn/[手寫系列]Go手寫db — — 第三版(實現分組、排序、聚合函數等))




實戰)
與稀疏混合專家(Qwen3MoeSparseMoeBlock)模塊解析)

