piecewise jerk算法介紹
piecewise jerk算法是百度Apollo中的一種用于路徑和速度平滑的算法,該算法假設相鄰點之間的jerk為常數,基于該假設將平滑問題構建為二次規劃問題,調用osqp求解器求解。參考論文為:Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
優化問題構建
1.優化變量
 其中x表示自變量,在進行路徑規劃為x為相對于參考線的橫向距離lateral,在進行速度規劃時x為相對于路徑起點的弧長station。
其中x表示自變量,在進行路徑規劃為x為相對于參考線的橫向距離lateral,在進行速度規劃時x為相對于路徑起點的弧長station。
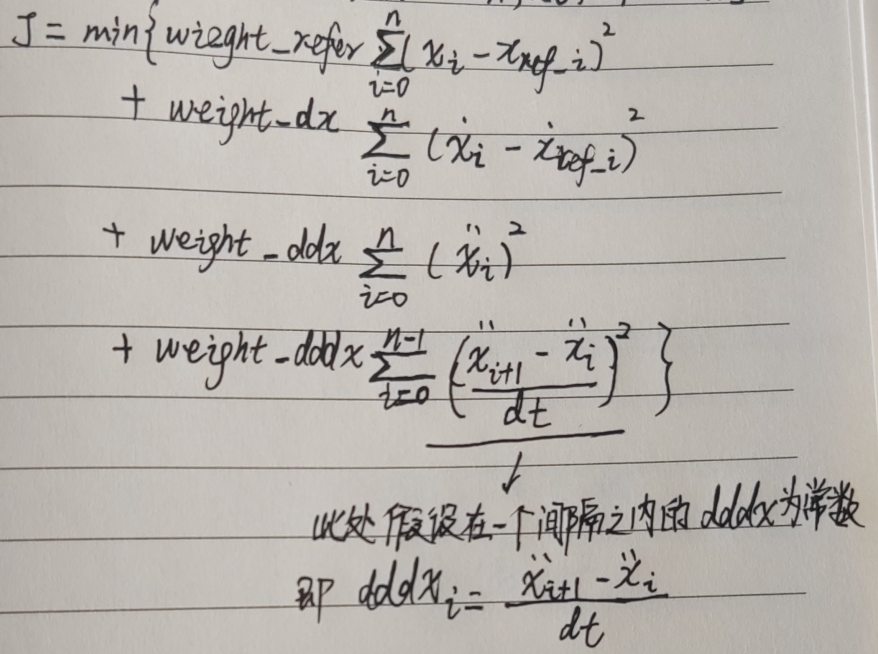
2.目標函數
目標函數主要考慮與參考點的距離和平滑性
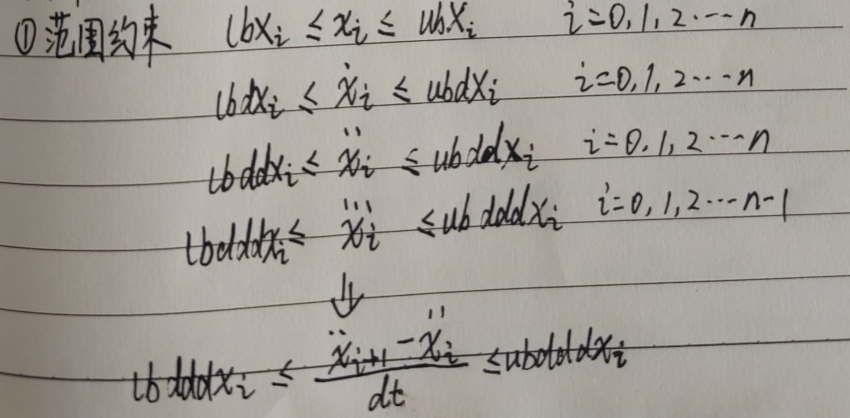
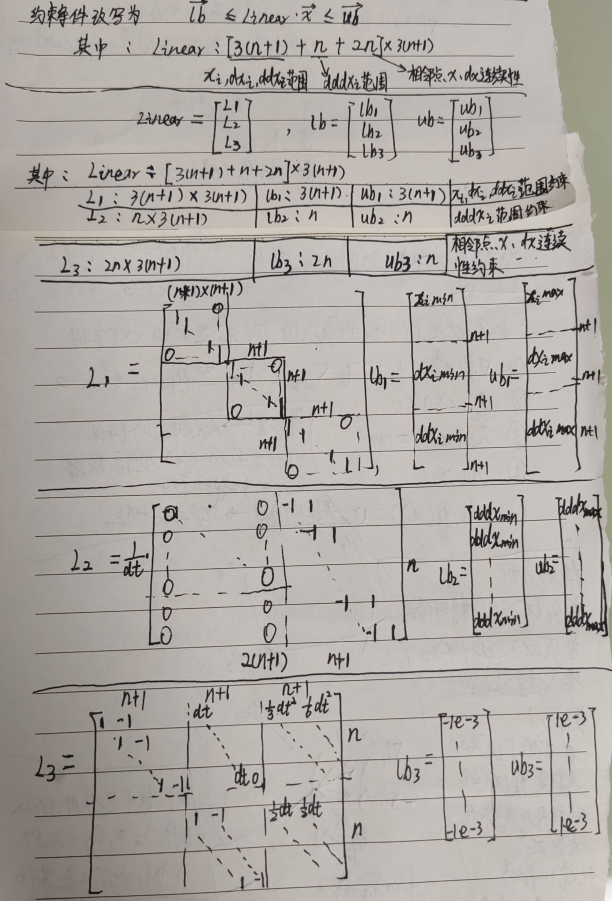
3.約束條件
約束條件包含兩部分,第一部分為x_i,dx_i,ddx_i,dddx_i的范圍約束,在進行路徑平滑時表示l_i,l_i’,l_i’‘,l_i’''的范圍約束,在進行速度平滑時表示station,velo,acce,jerk的約束范圍。
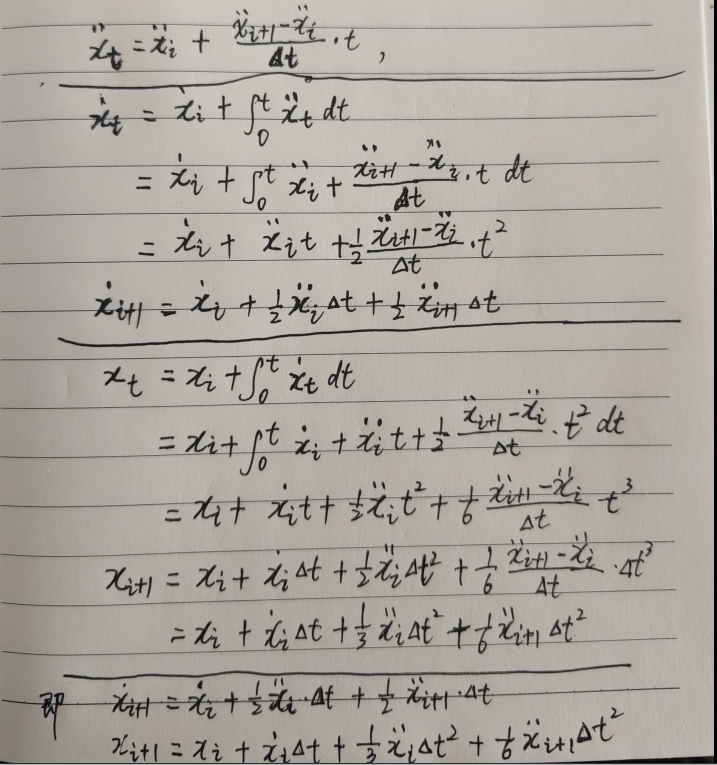
 第二部分為相鄰點之間的連續性約束:
第二部分為相鄰點之間的連續性約束:
4.修改為二次規劃問題
將目標函數修改為二次型
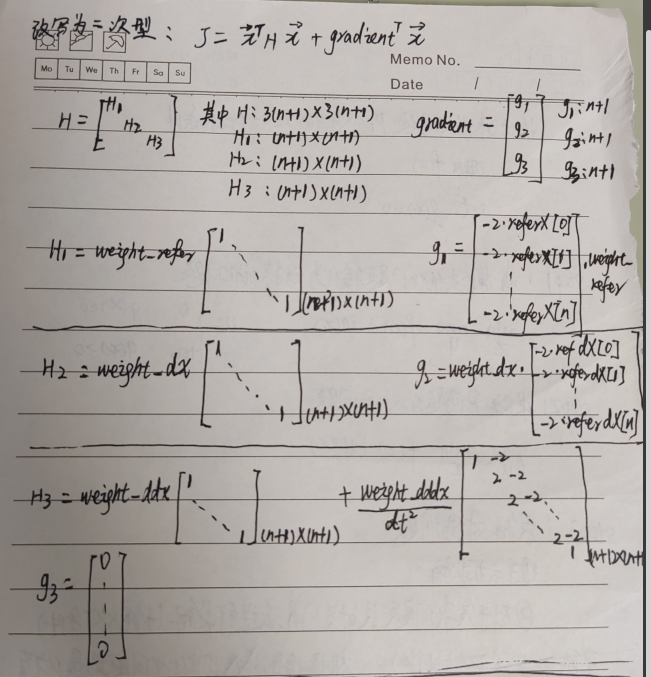
將約束條件修改為矩陣形式:













C++入門基礎1)
:封裝的層次(Python)——不同的邏輯“一樣”的預期)


:信任、約定與“安全基線”鏡像庫)

)