YOLOv8 的 ??Anchor-Free?? 設計摒棄了傳統 YOLO 系列中依賴預定義錨框(Anchor Boxes)的機制,轉而直接預測目標的中心點和邊界框尺寸。這種設計簡化了模型結構,降低了超參數調優的復雜度提升了檢測速度和精度。以下是其核心實現原理和關鍵技術細節。
1. Anchor-Based vs. Anchor-Free 的區別?
| 特性?? | ??Anchor-Based (YOLOv3-v5)?? | ??Anchor-Free (YOLOv8)?? |
|---|---|---|
| ??預測方式?? | 基于預定義錨框預測偏移量和尺寸調整 | 直接預測目標中心點偏移和邊界框尺寸 |
| ??超參數依賴?? | 需要人工設計或聚類生成錨框尺寸 | 無需錨框,完全端到端 |
| ??計算復雜度?? | 每個位置預測多個錨框,計算量大 | 每個位置預測單個目標,計算更高效 |
| ??小目標檢測?? | 依賴錨框尺寸匹配,可能漏檢 | 通過多尺度特征融合直接優化,魯棒性更強 |
2. YOLOv8 的 Anchor-Free 核心設計
(1) ??中心點預測(Center Prediction)?
- ??直接預測目標中心點??:
YOLOv8 的每個輸出特征圖位置負責預測一個目標的中心點。對于輸入圖像被劃分為?S×S?的網格,每個網格預測目標的中心點偏移量?(Δx,Δy),最終中心點坐標為:
(2) ??邊界框尺寸預測(Box Size Prediction)?
- ??直接預測寬高??:
模型直接輸出邊界框的寬度和高度?(w,h),無需通過錨框縮放。公式為:
其中?s?是當前特征圖相對于輸入圖像的下采樣倍數(如 8, 16, 32),![]() ?是網絡輸出的原始值(通過指數函數處理)。
?是網絡輸出的原始值(通過指數函數處理)。
關于anchor free還進一步涉及“中心點鄰近區域 + 動態IoU匹配+任務對齊[Task Alignment]”,參見:
YOLO V8中的?“中心點鄰近區域 + 動態IoU匹配“-CSDN博客
??(3) ??解耦頭(Decoupled Head)?
- ??分類與回歸任務分離??:
YOLO v8 使用解耦的檢測頭,將分類(Class)和回歸(Box)任務分開處理。具體結構如下:
# 示例代碼(簡化版解耦頭)
class DecoupledHead(nn.Module):def __init__(self, in_channels, num_classes):super().__init__()# 分類分支self.cls_convs = nn.Sequential(Conv(in_channels, 256), # 通道數調整Conv(256, 256),)self.cls_pred = nn.Conv2d(256, num_classes, kernel_size=1)# 回歸分支self.reg_convs = nn.Sequential(Conv(in_channels, 256),Conv(256, 256),)self.reg_pred = nn.Conv2d(256, 4, kernel_size=1) # 4: dx, dy, w, hdef forward(self, x):cls_feat = self.cls_convs(x)cls_out = self.cls_pred(cls_feat) # [B, num_classes, H, W]reg_feat = self.reg_convs(x)reg_out = self.reg_pred(reg_feat) # [B, 4, H, W]return cls_out, reg_out?優勢??:避免分類和回歸任務之間的特征干擾,提升精度。
* Anchor-Free 的優勢與挑戰??
??優勢??
-
??簡化模型??:無需設計錨框尺寸,減少超參數調優。
-
??端到端優化??:直接學習目標位置和尺寸,避免錨框帶來的歸納偏置。
-
??對小目標更友好??:通過多尺度特征融合直接優化,避免錨框尺寸不匹配問題。
??挑戰??
-
??密集??:同一網格內多個目標可能產生預測沖突,需依賴非極大值抑制(NMS)后處理。
-
??訓練穩定性??:直接預測中心點和尺寸對初始化敏感,需謹慎設計損失函數。
??3. 多尺度預測與特征融合
YOLOv8 通過 ??特征金字塔網絡(FPN)?? 和 ??路徑聚合網絡(PAN)?? 實現多尺度預測:
- ??FPN??:? ?自上而下傳遞高層語義特征,增強小目標檢測。
- ??PAN??:? ?自下而上傳遞低層細節特征,提升定位精度。
- ??輸出層??:在 3 個不同尺度的特征圖上進行預測(如 80x80, 40x40, 20x20),分別負責檢測小、中、大目標。
4. 損失函數設計
YOLOv8 的損失函數由2部分組成:
??1. 分類損失(Class Loss)?
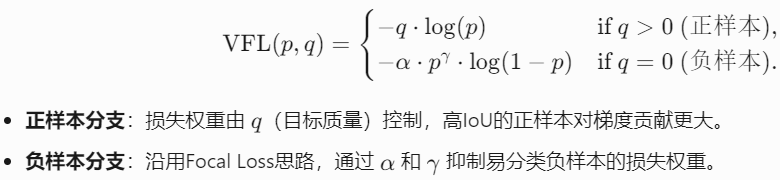
使用 ??Varifocal Loss??(改進版 Focal Loss),動態調整正負樣本權重,解決類別不平衡問題.

- q?是目標得分(如 IoU),p?是預測概率。
Varifocal Loss?? 是目標檢測中用于解決類別不平衡問題的損失函數,由微軟在 ??2020年?? 提出(論文《Varifocal Loss: A Learning Signal for Dense Object Detection》)。它是對 ??Focal Loss?? 的改進,特別適用于密集目標檢測任務(如YOLO系列),通過動態調整正負樣本權重,提升模型對困難樣本(如小目標、遮擋目標)的檢測能力。
1. 核心思想??
??(1) 問題背景??
- ??類別不平衡??:目標檢測中負樣本(背景)遠多于正樣本(目標),傳統交叉熵損失(Cross Entropy)會因負樣本主導梯度而降低模型對正樣本的學習能力。
- ??Focal Loss的局限??:
Focal Loss 通過降低易分類樣本(高置信度)的損失權重來緩解類別不平衡,但對正樣本的優化仍不夠精細,尤其對密集目標的預測質量(如IoU)缺乏敏感度。
??(2) Varifocal Loss的改進??
- ??正樣本權重動態調整??:
對正樣本的損失加權時,不再僅依賴度(僅依賴置信度會導致模型過度關注低質量(低 IoU)的正樣本,因為即使預測框與真實框的 IoU 很低(如 0.3),只要分類置信度?p?高,損失權重仍然會被降低),而是結合預測框與真實框的 ??IoU(目標質量分數),使模型更關注高IoU的正樣本。 - ??非對稱加權策略??:
正樣本使用 ??IoU-aware權重??,負樣本沿用類似Focal Loss的 ??置信度抑制權重??,形成非對稱加權。
2. 數學公式與推導
??(1) 定義符號??
p:模型預測的類別概率(經過Sigmoid后的值,范圍[0,1])。
q:真實標簽的目標質量分數(如預測框與真實框的IoU,范圍[0,1])。對于負樣本,q=0。
??(2) Varifocal Loss公式
(3) 關鍵特性??
-
??IoU樣本加權??:
-
正樣本損失與預測質量(IoU)直接關聯,鼓勵模型提升高質量預測的置信度。
-
??非對稱性??:
-
正負樣本采用不同加權策略,避免傳統Focal Loss對正樣本的過度抑制。
3. 與Focal Loss的對比?
| 特性?? | ??Focal Loss?? | ??Varifocal Loss?? |
|---|---|---|
| ??正樣本加權?? | 使用固定?α?\ gamma ) | 動態加權,權重=目標質量?q?(IoU) |
| ??負樣本加權?? | (1?p)^γ?抑制易分類負樣本 | 類似Focal Loss,但允許調整?α |
| ??優化目標?? | 緩解類別不平衡 | 同時緩解類別不平衡,提升預測質量(IoU) |
| ??適用場景?? | 通用目標檢測 | 密集目標檢測(如YOLO系列) |
?
2.???邊界框損失(Box Loss)
?YOLO v8 使用 ??DFL Loss + CIoU Loss?? 聯合優化邊界框:
??DFL Loss??:用于預測邊界框的坐標分布(中心點和寬高)。
??CIoU Loss??:進一步優化邊界框的整體位置和形狀。
A) 使用 ??CIoU Loss??,同時優化重疊區域、中心點距離和寬高比。
?
?B)?DFL? LOSS(Distribution Focal Loss)
在傳統目標檢測(如YOLOv3-v5)中,邊界框回歸通常直接預測坐標偏移量(如中心點?x,y?和寬高?w,h),并采用 ??Smooth L1 Loss?? 或 ??IoU-based Loss?? 進行優化。然而,這種方法存在以下問題:
坐標值的離散性?:
真實框坐標是連續的,但模型輸出是離散的浮點數,導致回歸目標與預測之間存在量化誤差。
- ??難樣本優化不足??:
直接回歸對極端值(如超大或超小目標)敏感,模型難以學習到準確的偏移量。 - ??缺乏不確定性建模??:
無法表達邊界框預測的置信度分布(例如,模型對某一邊界框的預測是否確定)。
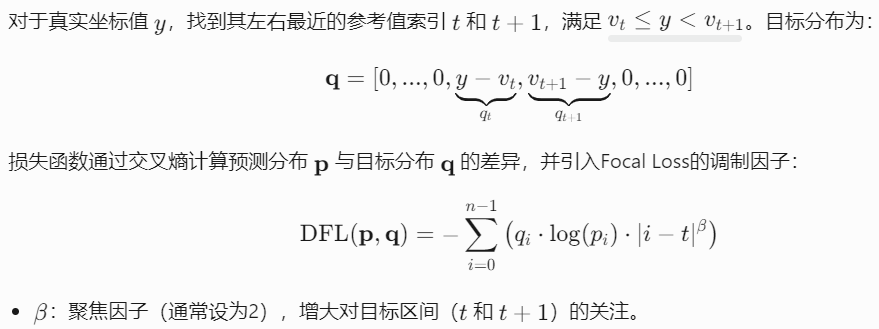
?DFL Loss將邊界框坐標的預測視為 ??概率分布??,通過預測離散化的概率值來間接回歸連續坐標。具體來說: ??離散化坐標空間??: 將坐標值范圍離散化為 n 個區間(如 n=16),模型預測每個區間對應的概率。 ??概率分布到坐標值的轉換??: 通過加權求和離散區間的參考值,得到最終的連續坐標值。 ??DFL??通過Focal Loss的思想,強化對高概率區間的學習,抑制低概率區間的干擾。
數學公式與實現步驟:
(1) 離散化坐標表示??
假設需要預測的坐標值(如中心點?y?)范圍為?[ymin?,ymax?],將其離散化為?n?個區間:

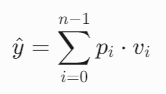
?(2) 從分布到坐標值的計算??
最終坐標值通過加權求和得到:
(3) DFL Loss定義??
DFL Loss vs?傳統回歸方法
| ??特性?? | ??傳統回歸(如Smooth L1)?? | ??DFL Loss?? |
|---|---|---|
| ??預測形式?? | 直接輸出坐標值 | 輸出離散區間的概率分布 |
| ??目標表示?? | 連續值 | 概率分布 |
| ??誤差敏感性?? | 對極端值敏感 | 通過分布建模降低離群點影響 |
| ??不確定性建模?? | 無法表達置信度 | 概率分布隱含不確定性 |
| ??小目標檢測?? | 易受量化誤差影響 | 離散化分布緩解誤差 |




)

若依生成左樹右表)
)






)

)


