🔍
B站相應的視屏教程:
📌 內核:博文+視頻 - 從靜態綁定驅動模型到現代設備模型
在 Linux 內核的發展歷程中,設備驅動結構經歷了從"硬編碼 + 手動注冊"的早期實現方式,到"設備模型統一管理"的現代化架構。這一演進不僅改變了驅動開發者的習慣,也極大提升了內核的可維護性、擴展性與模塊化能力。
本篇博文將聚焦早期的 靜態綁定驅動模型(Static Binding Driver Model),深入講解其原理、結構、優缺點,并與后續的設備模型機制進行對比,幫助讀者建立完整的認知脈絡。
📘 第一部分:什么是靜態綁定驅動模型?
所謂“靜態綁定”,是指驅動代碼中通過硬編碼的方式指定所使用的設備資源(如物理地址、中斷號、引腳編號等),并在模塊初始化過程中手動完成所有注冊與初始化步驟。
這種方式廣泛存在于 Linux v2.4 及更早版本 中,當時還沒有統一的 struct device、platform_driver、of_match_table 等機制。
? 核心特征
| 特征類別 | 表現 |
|---|---|
| 資源管理 | 資源地址、IRQ 手動硬編碼 |
| 匹配機制 | 沒有匹配機制,全靠人工指定 |
| 驅動結構 | 所有邏輯集中在 init 函數中 |
| 生命周期管理 | 沒有 probe/remove 接口 |
| 模塊加載 | 無法自動匹配,僅靠 insmod |
| 用戶態接口 | 無 sysfs 映射,udev 不可見 |
📌 示例:靜態綁定驅動代碼片段
#define LCDIF3_BASE 0x32fc6000
#define LCDIF3_IRQ 42static void __iomem *lcd_base;static int __init lcd_driver_init(void)
{request_mem_region(LCDIF3_BASE, 0x1000, "lcdif");lcd_base = ioremap(LCDIF3_BASE, 0x1000);request_irq(LCDIF3_IRQ, lcd_irq_handler, 0, "lcdif", NULL);// 初始化寄存器writel(0x01, lcd_base + 0x00);printk("lcd driver loaded\n");return 0;
}static void __exit lcd_driver_exit(void)
{free_irq(LCDIF3_IRQ, NULL);iounmap(lcd_base);release_mem_region(LCDIF3_BASE, 0x1000);
}module_init(lcd_driver_init);
module_exit(lcd_driver_exit);
MODULE_LICENSE("GPL");
📘 第二部分:靜態綁定模型的優缺點
? 優點
- 實現簡單,易于快速驗證硬件邏輯
- 沒有抽象層,調試路徑清晰
- 適用于早期定制板、實驗性代碼
? 缺點
| 問題類型 | 描述 |
|---|---|
| 可移植性差 | 所有硬件信息寫死在代碼中,不易適配新平臺 |
| 不支持熱插拔 | 無法根據硬件動態加載驅動模塊,udev 無法使用 |
| 維護困難 | 所有初始化、清理邏輯集中在一個文件中,不易分離模塊 |
| 無法復用 | 沒有設備模型的抽象結構,代碼難以共享給其他項目或平臺 |
| 無法使用設備樹 | 與現代 SoC 的 DTS 描述方式不兼容,不能通過 compatible 匹配驅動 |
📘 第三部分:設備模型的引入與演進
Linux 內核從 v2.5.x 開始引入設備模型(Device Model),在 v2.6.0(2003 年) 正式啟用。
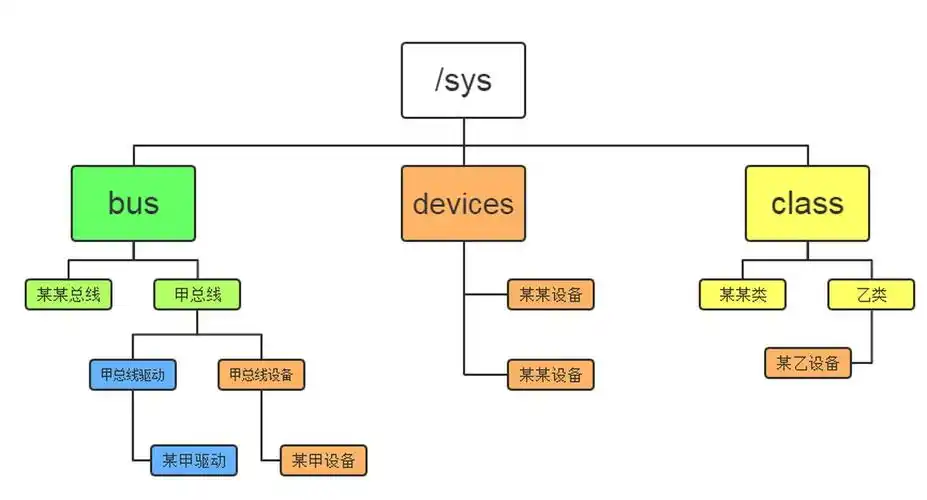
它提供了統一的結構用于描述設備(struct device)、驅動(struct device_driver)、總線(struct bus_type)與設備類(struct class),實現驅動與設備的解耦、匹配與動態管理。
📎 核心機制
| 結構體 | 作用說明 |
|---|---|
struct device | 表示一個設備本體,包含資源、狀態等 |
struct driver | 表示驅動代碼與功能結構 |
struct bus_type | 表示設備與驅動的匹配方式(如 platform) |
struct class | 用于創建 /sys/class/ 接口 |
? 匹配機制演進
// 匹配表(由驅動提供)
static const struct of_device_id xxx_of_match[] = {{ .compatible = "fsl,imx8mp-lcdif1" },{}
};// 驅動注冊結構
static struct platform_driver xxx_driver = {.probe = xxx_probe,.remove = xxx_remove,.driver = {.name = "lcdif",.of_match_table = xxx_of_match,},
};
📘 自動加載與用戶空間聯動
- sysfs 自動創建
/sys/devices/platform/... /sys/bus/platform/drivers/...中掛接驅動- udev 可根據 alias 自動調用 modprobe 加載模塊
📘 第四部分:對比分析:靜態綁定 vs 設備模型
| 對比維度 | 靜態綁定驅動 | 設備模型驅動 |
|---|---|---|
| 資源定義 | 硬編碼 | 通過 DTS 或 platform_device 動態提供 |
| 匹配機制 | 無自動匹配 | 支持 of_match_table 自動綁定 |
| 生命周期管理 | 通過 module_init/exit 手動完成 | 通過 probe/remove 自動分離處理 |
| 可移植性 | 不具備平臺適配能力 | 支持同一驅動在多個硬件平臺間共享 |
| sysfs 支持 | 不支持 | 自動創建設備節點,支持 udev、熱插拔等 |
| 資源釋放 | 手動 free_irq/iounmap | 支持 devm_* 系列自動回收 |
| 推薦使用場景 | 早期內核、快速驗證、簡單定制板 | 主線驅動開發、模塊化平臺支持 |
📘 第五部分:案例對比分析
📌 靜態綁定代碼核心點
- 所有地址/中斷號寫死
- 所有初始化邏輯集中在
lcd_driver_init() - 無匹配邏輯、無設備結構體、無
struct platform_device
📌 設備模型版本(platform)核心點
of_match_table用于與設備樹compatible匹配- 注冊為
platform_driver,掛接bus_type probe()自動被調用,完成注冊與初始化- 所有資源通過
devm_*自動管理
? 總結:為什么設備模型是驅動發展的必然?
靜態綁定驅動模型雖然在早期發揮了重要作用,但隨著 SoC 架構的復雜化與模塊化需求的增強,其硬編碼、不可復用的特性逐漸成為負擔。
設備模型通過總線、設備、驅動三者的分離與抽象,成功實現了驅動框架的現代化,使得:
- 一個驅動可以匹配多個設備
- 一個設備可以熱插拔與自動加載驅動
- 系統可以動態管理設備生命周期
- 用戶空間可以通過 sysfs 觀察設備狀態
這正是現代嵌入式系統與通用 Linux 平臺所需的基礎能力。
📚 延伸閱讀
- Linux Device Model 設計初衷 - Patrick Mochel
- 內核文檔:Documentation/driver-model/
- 內核源碼:drivers/base/*、include/linux/device.h
- 推薦書籍:《Linux Device Drivers 第三版》《Linux內核設計與實現》
下一篇,我們將結合實際平臺(如 i.MX8M、Raspberry Pi)對比分析設備樹中的設備節點是如何與驅動匹配的,深入剖析設備模型運行時的數據流結構。

)

若依生成左樹右表)
)






)

)





![信息學奧賽一本通 1498:Roadblocks | 洛谷 P2865 [USACO06NOV] Roadblocks G](http://pic.xiahunao.cn/信息學奧賽一本通 1498:Roadblocks | 洛谷 P2865 [USACO06NOV] Roadblocks G)