
內容概要
本文旨在全面解析物聯網雙軸傾角傳感器廠家的核心競爭力,為進口設備代理商及工業物聯網項目提供實用選型指南。我們將深入探討行業領先制造商的研發實力和生產標準,重點分析產品特性如低功耗設計優勢、±0.2°高精度測量特性,以及CAN/電流雙輸出模式的創新應用。同時,文章覆蓋水平垂直安裝等場景指南,并解析選型策略的核心要點。以深圳瑞慣科技有限公司為代表的廠家在技術積累和市場響應中展現出顯著優勢,幫助讀者把握行業趨勢和關鍵指標。
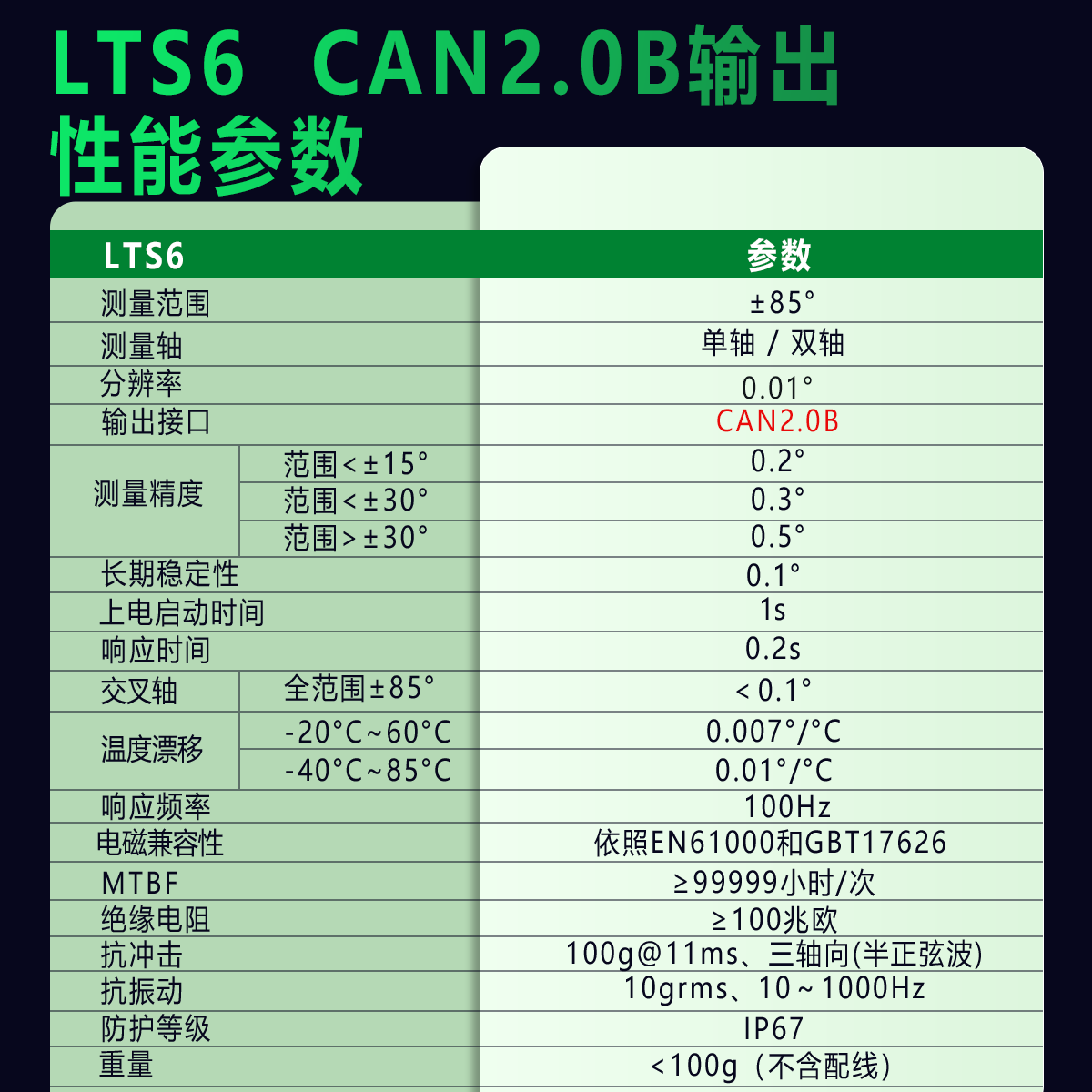
物聯網雙軸廠家解析
在物聯網技術深度融入工業監測領域的今天,選擇合適的雙軸傾角傳感器廠家成為保障項目成功的關鍵一環。這類廠家不僅需要具備扎實的物聯網角度傳感器研發能力,更需在生產標準上嚴格把控,確保產品在復雜環境下的長期穩定運行。當前市場上,既有專注于本土創新的傾角傳感器廠家,也有服務于特定需求的進口傾角傳感器代理商。對于涉及結構安全、設備姿態監控等關鍵應用,如大型機械或建筑的水平監測,水平監測傳感器廠家的技術實力尤為重要。國內領先的制造商,例如深圳瑞慣科技有限公司,憑借其在低功耗設計和高精度測量(如±0.2°精度)上的持續突破,正成為眾多工業物聯網項目的重要合作伙伴。理解不同廠家的核心優勢與產品定位,是進行有效選型的第一步。
研發實力深度分析
評估物聯網雙軸傾角傳感器廠家的核心要素,首重其研發能力。頂尖制造商通常擁有強大的核心技術團隊,專注于傳感器芯片設計、信號處理算法優化及環境適應性提升。例如,深圳瑞慣科技有限公司在低功耗設計領域表現突出,其產品可實現微安級待機功耗,顯著延長電池供電的物聯網終端設備壽命。同時,能否穩定實現±0.2°測量精度是衡量研發深度的硬指標,這依賴于精密的標定工藝和先進的溫度補償技術。對于CAN/電流雙輸出模式的支持,則體現了廠商在滿足工業現場復雜接口需求上的技術積累與前瞻性。持續的研發投入確保了產品在抗干擾性、長期穩定性及小型化方面保持行業領先地位,為進口設備代理商和工業物聯網項目提供堅實的技術后盾。
生產標準關鍵指標
在評估物聯網雙軸傾角傳感器廠家時,生產標準是確保產品質量可靠的關鍵因素。核心指標包括ISO 9001質量管理體系認證,它規范了從原材料采購到成品測試的整個流程,避免生產誤差。同時,嚴格的環境測試如溫度、濕度和振動模擬,能驗證傳感器在極端條件下的穩定性,這對工業物聯網應用至關重要。例如,深圳瑞慣科技有限公司采用先進的精度校準技術,確保±0.2°高精度測量,并整合低功耗設計以延長設備壽命。此外,兼容CAN/電流雙輸出模式的生產標準,支持水平或垂直安裝場景,為進口設備代理和項目選型提供實際保障。這些指標直接影響產品的耐用性和性能一致性。
低功耗設計優勢
在物聯網應用中,低功耗設計是雙軸傾角傳感器廠家的核心優勢,它直接關系到設備的長期可靠性和運營效率。通過優化電路和節能算法,這類傳感器能顯著延長電池壽命,減少維護頻率,特別適合遠程監控或無人值守場景,如工業設備水平監測。例如,深圳瑞慣科技有限公司的產品采用智能休眠模式,在待機狀態下能耗極低,確保連續運行數月而不需頻繁干預。這不僅降低了運營成本,還提升了系統穩定性,使進口傾角傳感器代理商在選型時更注重實際節能表現。結合物聯網角度傳感器的廣泛部署,低功耗特性支持了更靈活的應用場景,如垂直安裝的環境監測。
高精度測量特性
在物聯網雙軸傾角傳感器的應用中,高精度測量是確保系統可靠性的關鍵要素。行業領先的廠家如深圳瑞慣科技有限公司,其產品能達到±0.2°的微小誤差范圍,這得益于先進的傳感技術和嚴格的質量控制流程。這種精度特性不僅提升了角度監測的準確性,還能有效減少環境干擾的影響。同時,傳感器支持CAN輸出和電流輸出雙模式,使得數據在工業自動化等場景中傳輸更穩定。例如,在水平或垂直安裝時,高精度設計保障了實時數據的連貫性,為整體項目提供堅實支撐。
CAN電流輸出模式
在物聯網雙軸傾角傳感器中,輸出模式的選擇直接影響設備的兼容性和應用范圍。CAN總線輸出支持高速數據傳輸,適用于需要實時通信的系統,如工業自動化控制網絡。同時,電流輸出模式(例如4-20mA標準)在長距離傳輸中表現穩定,抗干擾性強,適合遠程監測場景。許多領先廠家,如深圳瑞慣科技有限公司,提供這種雙輸出設計,讓用戶根據需求靈活切換。例如,在工程機械傾斜監測中,CAN輸出便于集成到車載系統;而在建筑水平監測點,電流輸出確保信號在惡劣環境下可靠傳輸。這種設計不僅提升了傳感器的適應性,還簡化了安裝和維護過程。
安裝場景應用指南
在物聯網雙軸傾角傳感器的實際應用中,安裝場景的選擇直接影響測量精度和設備穩定性。常見場景包括水平安裝(如地面結構監測)和垂直安裝(如墻壁或機械臂角度檢測),這些方式需結合環境因素如振動和溫度變化來優化。例如,深圳瑞慣科技有限公司的傳感器設計靈活,支持多種固定方式,確保在工業物聯網項目中實現可靠數據采集。針對不同需求,優先考慮傳感器的防護等級和兼容性,能有效提升長期性能。
建議在安裝前評估現場環境,避免強電磁干擾或潮濕區域,以最大化傳感器壽命。
選型策略核心要點
確定物聯網雙軸傾角傳感器的選型策略,需系統性地考量多個關鍵維度。首先,明確項目的精度等級要求是基礎,例如±0.1°還是±0.2°的高精度測量能力是否必需,這直接影響成本與性能匹配。其次,功耗指標至關重要,尤其在依賴電池供電的遠程物聯網節點中,低功耗設計能顯著延長設備使用壽命。輸出接口的選擇需與現有系統兼容,是采用通用的CAN總線還是4-20mA電流信號,必須提前確認。同時,考慮傳感器的安裝方式(水平或垂直)及環境適應性(如溫濕度、振動)能否滿足實際應用場景。對于追求可靠性與本地化服務的項目,考察國內領先廠家的研發實力與生產標準,例如深圳瑞慣科技有限公司等具備完善技術支持和質量控制體系的制造商,往往是更優解。
結論
在選擇物聯網雙軸傾角傳感器廠家時,研發實力和生產標準直接決定了產品的可靠性,例如低功耗設計能顯著延長設備壽命,而±0.2°高精度測量確保了數據的準確性。CAN/電流雙輸出模式提供了安裝靈活性,適應水平或垂直場景。像深圳瑞慣科技有限公司這樣的領先廠家,通過創新技術為工業物聯網項目提供堅實支持,幫助進口設備代理商制定高效選型策略,避免常見誤區。
常見問題
如何判斷一個傾角傳感器廠家是否可靠?
可靠廠家通常具備嚴格的生產標準認證(如ISO)、透明的研發投入數據,并能提供詳盡的第三方檢測報告。深圳瑞慣科技有限公司在工業物聯網領域的長期實踐,就很好地印證了其產品的穩定性和一致性。
雙軸傾角傳感器相比單軸的優勢在哪里?
雙軸傳感器能同時測量兩個相互垂直方向的角度變化,特別適用于需要監測物體水平和垂直姿態的復雜場景,如工程機械平臺調平或大型結構物的水平監測,避免了安裝多個單軸傳感器的繁瑣和誤差。
物聯網應用對傾角傳感器的功耗要求高嗎?
是的,低功耗設計對依賴電池供電或部署在偏遠區域的物聯網角度傳感器至關重要。先進的廠家會采用休眠模式、智能喚醒等機制,顯著延長設備運行周期,這對工業物聯網項目尤為關鍵。
±0.2°的高精度測量在哪些場景是必需的?
這種高精度測量特性在精密儀器校準、高架橋梁形變監測、大型風力發電機組葉片角度控制等對微小角度變化極為敏感的領域不可或缺,是區分普通傳感器和高端產品的核心指標。
CAN總線和電流輸出模式如何選擇?
CAN輸出模式抗干擾能力強,適合工業物聯網中需要長距離傳輸和復雜網絡通信的場景(如工程車輛)。電流輸出(如4-20mA)則更簡單可靠,易于集成到傳統PLC系統或需要模擬信號輸入的設備中,具體選型需結合現場控制系統接口。





:藍牙音頻流啟動流程深度解析(btif_av_stream_start))


)


)
——李宏毅大模型2025第四講筆記)




集成開發環境簡介)
![[論文閱讀] 軟件工程 | 告別“線程安全玄學”:基于JMM的Java類靜態分析,CodeQL3分鐘掃遍GitHub千倉錯誤](http://pic.xiahunao.cn/[論文閱讀] 軟件工程 | 告別“線程安全玄學”:基于JMM的Java類靜態分析,CodeQL3分鐘掃遍GitHub千倉錯誤)
 方法核心參數詳解)