霍夫變換詳解與代碼示例
霍夫變換(Hough Transform)是一種用于檢測圖像中幾何形狀(如直線、圓)的特征提取技術。其核心思想是將圖像空間中的點映射到參數空間(霍夫空間),通過累積投票機制識別形狀。下面我將逐步推導原理、解釋霍夫空間、詳述直線和圓檢測,并提供Python代碼示例(使用OpenCV庫)。
1. 霍夫變換原理
霍夫變換基于參數化思想:圖像空間中的點對應霍夫空間中的曲線,而霍夫空間中的峰值對應圖像中的幾何形狀。
- 基本推導(以直線為例):
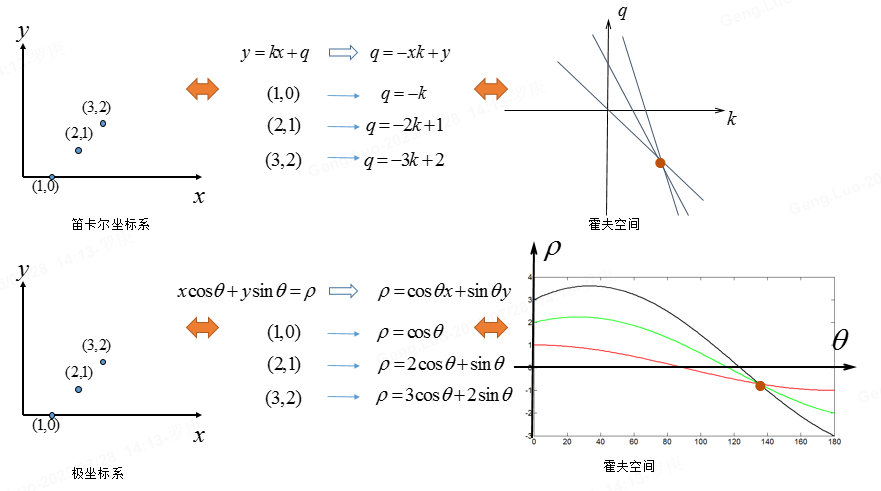
- 圖像空間中,一條直線可表示為 y=mx+cy = mx + cy=mx+c,但此形式在垂直線時斜率 mmm 無限大,不實用。改用極坐標方程:
ρ=xcos?θ+ysin?θ \rho = x \cos \theta + y \sin \theta ρ=xcosθ+ysinθ
其中:- ρ\rhoρ 是原點到直線的垂直距離(ρ≥0\rho \geq 0ρ≥0),
- θ\thetaθ 是直線與x軸的夾角(0≤θ<180°0 \leq \theta < 180^\circ0≤θ<180°)。
- 圖像空間中,一條直線可表示為 y=mx+cy = mx + cy=mx+c,但此形式在垂直線時斜率 mmm 無限大,不實用。改用極坐標方程:
-
圖像空間中每個點 (xi,yi)(x_i, y_i)(xi?,yi?) 對應霍夫空間中的一條正弦曲線:ρ=xicos?θ+yisin?θ\rho = x_i \cos \theta + y_i \sin \thetaρ=xi?cosθ+yi?sinθ。
-
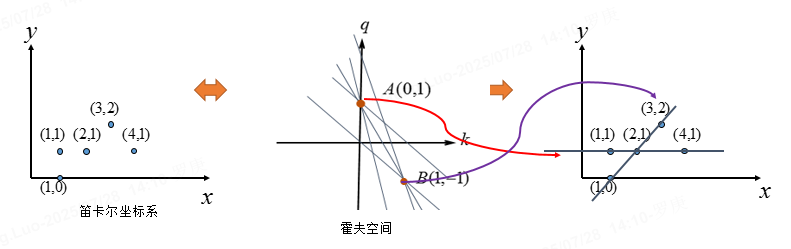
多個點共線時,它們在霍夫空間中的曲線相交于一點 (θk,ρk)(\theta_k, \rho_k)(θk?,ρk?),該點即為直線參數。
-
累積投票:將霍夫空間離散化為網格(累加器數組),每個點 (xi,yi)(x_i, y_i)(xi?,yi?) 對所有可能的 θ\thetaθ 計算 ρ\rhoρ,并在對應網格單元投票。峰值單元對應檢測到的直線。
-
通用原理:
- 適用于任意參數化形狀(如圓、橢圓)。
- 優點:對噪聲和部分遮擋魯棒;缺點:計算復雜度隨參數維度增加(如直線是二維,圓是三維)。
2. 霍夫空間
霍夫空間是參數空間,用于累積投票:
- 定義:圖像空間中的點映射到參數空間中的曲線或曲面。
- 量化:
- θ\thetaθ 范圍:000 到 180°180^\circ180°(或 000 到 π\piπ 弧度),通常離散為 1°1^\circ1° 步長。
- ρ\rhoρ 范圍:?D-D?D 到 DDD(DDD 為圖像對角線長度),離散為整數步長(如1像素)。
- 累加器:二維數組 A[θ][ρ]A[\theta][\rho]A[θ][ρ],初始為0。每個邊緣點增加通過它的所有可能直線的投票數。峰值 A[θk][ρk]A[\theta_k][\rho_k]A[θk?][ρk?] 表示檢測結果。
3. 霍夫直線檢測
基于上述原理,檢測圖像中的直線:
-
步驟:
- 邊緣檢測:預處理圖像(如Canny邊緣檢測),獲取二值邊緣圖。
- 映射到霍夫空間:對每個邊緣點 (xi,yi)(x_i, y_i)(xi?,yi?),遍歷 θ\thetaθ(例如 θ=0°,1°,…,179°\theta = 0^\circ, 1^\circ, \dots, 179^\circθ=0°,1°,…,179°),計算 ρ=xicos?θ+yisin?θ\rho = x_i \cos \theta + y_i \sin \thetaρ=xi?cosθ+yi?sinθ,并累加 A[θ][ρ]A[\theta][\rho]A[θ][ρ]。
- 找峰值:設定閾值,A[θ][ρ]>閾值A[\theta][\rho] > \text{閾值}A[θ][ρ]>閾值 的單元對應檢測到的直線。
- 轉換回圖像空間:用 (θk,ρk)(\theta_k, \rho_k)(θk?,ρk?) 繪制直線 ρk=xcos?θk+ysin?θk\rho_k = x \cos \theta_k + y \sin \theta_kρk?=xcosθk?+ysinθk?。
-
優化:使用概率霍夫變換(Probabilistic Hough Transform),隨機采樣邊緣點,減少計算量。
4. 霍夫圓檢測
圓檢測擴展了霍夫變換到三維參數空間:
- 圓方程:圓心 (a,b)(a, b)(a,b),半徑 rrr,方程為:
(x?a)2+(y?b)2=r2 (x - a)^2 + (y - b)^2 = r^2 (x?a)2+(y?b)2=r2 - 霍夫空間:三維空間 (a,b,r)(a, b, r)(a,b,r)。
- 步驟:
- 邊緣檢測:獲取邊緣圖。
- 梯度優化:利用邊緣梯度方向減少計算:
- 邊緣點 (xi,yi)(x_i, y_i)(xi?,yi?) 的梯度方向 ?\phi? 近似圓心方向。
- 對每個邊緣點,沿梯度方向 ?\phi? 和 ?+180°\phi + 180^\circ?+180°,在可能半徑 rrr 范圍內計算圓心 (a,b)(a, b)(a,b):
a=xi?rcos??,b=yi?rsin?? a = x_i - r \cos \phi, \quad b = y_i - r \sin \phi a=xi??rcos?,b=yi??rsin? - 累加三維累加器 A[a][b][r]A[a][b][r]A[a][b][r]。
- 找峰值:設定閾值,A[a][b][r]>閾值A[a][b][r] > \text{閾值}A[a][b][r]>閾值 的單元對應檢測到的圓。
- 挑戰:三維空間計算量大,常使用多尺度或梯度方法優化。
5. 代碼示例
使用Python和OpenCV實現霍夫直線和圓檢測。需安裝OpenCV:pip install opencv-python。
(a) 霍夫直線檢測代碼
import cv2
import numpy as np
import matplotlib.pyplot as plt# 讀取圖像并轉換為灰度
image = cv2.imread('input.jpg') # 替換為您的圖像路徑
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 邊緣檢測(Canny)
edges = cv2.Canny(gray, 50, 150) # 閾值50和150# 霍夫直線變換
# 參數:邊緣圖, rho精度(1像素), theta精度(1度), 閾值(投票數)
lines = cv2.HoughLines(edges, 1, np.pi / 180, 150) # 閾值調整以控制檢測靈敏度# 繪制檢測到的直線
if lines is not None:for line in lines:rho, theta = line[0]a = np.cos(theta)b = np.sin(theta)x0 = a * rhoy0 = b * rho# 計算直線端點x1 = int(x0 + 1000 * (-b))y1 = int(y0 + 1000 * (a))x2 = int(x0 - 1000 * (-b))y2 = int(y0 - 1000 * (a))cv2.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2) # 紅色直線# 顯示結果
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.title('霍夫直線檢測')
plt.axis('off')
plt.show()
(b) 霍夫圓檢測代碼
import cv2
import numpy as np
import matplotlib.pyplot as plt# 讀取圖像并轉換為灰度
image = cv2.imread('input.jpg') # 替換為您的圖像路徑
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = cv2.medianBlur(gray, 5) # 中值濾波去噪# 霍夫圓變換
# 參數:輸入圖, 方法(HOUGH_GRADIENT), dp=1(累加器分辨率), minDist(圓心最小距離), param1(Canny高閾值), param2(累加器閾值), minRadius, maxRadius
circles = cv2.HoughCircles(gray, cv2.HOUGH_GRADIENT, dp=1, minDist=50,param1=50, param2=30, minRadius=10, maxRadius=100)# 繪制檢測到的圓
if circles is not None:circles = np.uint16(np.around(circles))for circle in circles[0, :]:center = (circle[0], circle[1]) # 圓心radius = circle[2] # 半徑cv2.circle(image, center, radius, (0, 255, 0), 2) # 綠色圓cv2.circle(image, center, 2, (0, 0, 255), 3) # 圓心紅點# 顯示結果
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.title('霍夫圓檢測')
plt.axis('off')
plt.show()
代碼說明:
- 輸入圖像:替換
'input.jpg'為您的圖像路徑(確保圖像有清晰邊緣)。 - 參數調整:
- 直線檢測:
cv2.HoughLines的閾值控制最少投票數(值越大,檢測越嚴格)。 - 圓檢測:
param2是關鍵閾值(值越小,檢測越多圓,但噪聲增加)。
- 直線檢測:
- 輸出:顯示原圖疊加檢測結果(直線為紅色,圓為綠色帶圓心紅點)。
- 優化:實際應用中,可結合圖像預處理(如高斯模糊)提高準確性。
霍夫變換是計算機視覺基礎工具,廣泛應用于車道檢測、工業質檢等領域。通過調整參數和優化方法,可平衡精度與效率。
總結
霍夫變換通過將圖像空間映射到參數空間,有效檢測幾何形狀。其核心是累加器投票機制,在霍夫空間中識別峰值。本示例展示了直線檢測的實現,可擴展到其他形狀(如圓)。實際使用時,建議結合圖像優化(如降采樣)以提高效率。如果您有特定圖像或擴展需求,我可以進一步調整代碼!
)






,巨人網絡(SZ:002558))





與web應用防火墻(WAF))

數據類型與運算符)

—Vue3 ref相關API》)

