1.1 研究背景與意義
1.1.1 研究背景
甘蔗作為全球最重要的糖料作物之一,在農業經濟領域占據著舉足輕重的地位。我國是甘蔗的主要種植國家,尤其是廣西、廣東、云南等地,甘蔗種植面積廣泛,是當地農業經濟的重要支柱產業。甘蔗不僅是制糖的主要原料,其副產品還廣泛應用于造紙、飼料、能源等多個領域,對相關產業的發展起著關鍵的支撐作用。據統計,我國每年的甘蔗產量巨大,為食糖生產提供了堅實的原料基礎,同時也為地方經濟發展和農民增收做出了重要貢獻。
然而,傳統的甘蔗種植方式主要依賴人工操作,這種方式存在諸多局限性。在甘蔗種植的各個環節,如播種、田間管理、收獲等,人工勞動強度極大。以甘蔗收獲環節為例,由于甘蔗植株高大、莖稈堅硬,人工砍伐需要耗費大量的體力和時間。而且,人工種植效率低下,難以滿足大規模甘蔗種植的需求。在勞動力成本不斷上升的今天,人工種植甘蔗的成本也在逐年增加,這嚴重壓縮了甘蔗種植的利潤空間,降低了蔗農的種植積極性。此外,人工種植還存在著作業質量不穩定、受天氣等自然因素影響較大等問題,這些都制約了甘蔗產業的進一步發展。
隨著農業現代化的不斷推進,農業機械化成為提高農業生產效率、降低生產成本的必然趨勢。無人甘蔗小車作為一種新型的農業機械設備,具有自動化、智能化的特點,能夠有效解決人工種植甘蔗的諸多問題。而履帶式底盤作為無人甘蔗小車的關鍵部件,其性能的優劣直接影響著小車的行駛穩定性、通過性和作業效率。因此,開展對無人甘蔗小車履帶式底盤行走系統的研究具有重要的現實意義,它能夠滿足甘蔗種植產業對高效、智能農業機械設備的迫切需求,推動甘蔗種植產業向現代化、智能化方向發展。
1.1.2 研究意義
本研究對無人甘蔗小車履帶式底盤行走系統的深入探究,在多個方面具有重要意義。在提高甘蔗種植效率方面,無人甘蔗小車能夠實現 24 小時不間斷作業,相比人工種植,其作業速度更快、效率更高。例如,在甘蔗播種環節,無人甘蔗小車可以精準地按照預設的行距和株距進行播種,大大提高了播種的效率和均勻性;在田間管理環節,能夠快速完成施肥、除草、灌溉等作業,節省了大量的時間和人力成本。通過提高種植效率,能夠使甘蔗在更短的時間內完成各個生長階段的管理,從而提高甘蔗的產量和質量。
從降低成本角度來看,使用無人甘蔗小車可以減少對大量人工勞動力的依賴。隨著勞動力成本的不斷攀升,人工種植甘蔗的成本也越來越高。而無人甘蔗小車一次性投入后,雖然初期成本較高,但從長期來看,其運行成本相對較低。它不需要支付人工工資、福利等費用,同時還能避免因人工操作失誤而帶來的損失,從而有效降低了甘蔗種植的總成本,提高了甘蔗種植的經濟效益。
推動農業機械化進程也是本研究的重要意義之一。無人甘蔗小車的應用是農業機械化、智能化發展的具體體現。它將先進的機械技術、電子技術、信息技術等融合在一起,為農業生產帶來了新的變革。通過對無人甘蔗小車履帶式底盤行走系統的研究和優化,可以為其他農業機械設備的研發和改進提供參考和借鑒,促進整個農業機械化產業的發展,提升我國農業現代化水平,增強我國農業在國際市場上的競爭力。
1.2 國內外研究現狀
在國外,甘蔗種植機械化發展較早,一些農業發達國家在無人甘蔗小車及履帶式底盤行走系統方面取得了顯著成果。美國作為農業機械化高度發達的國家,其研發的無人甘蔗小車配備了先進的全球定位系統(GPS)和地理信息系統(GIS),能夠實現高精度的自主導航和作業路徑規劃。例如,約翰迪爾公司研發的一款農業無人車,通過搭載的多傳感器融合系統,包括激光雷達、攝像頭、毫米波雷達等,能夠實時感知周圍環境信息,在甘蔗種植園中可以精確地完成播種、施肥、灌溉等作業任務 ,大大提高了作業效率和質量。
在歐洲,德國和法國等國家也在積極開展無人甘蔗小車及履帶式底盤行走系統的研究。德國的一些科研機構致力于開發智能化的履帶式底盤,采用了先進的機電一體化技術,實現了底盤的高效驅動和精準控制。其研發的履帶式底盤具有良好的通過性和穩定性,能夠適應不同地形和土壤條件下的甘蔗種植作業。法國則注重在無人甘蔗小車的智能控制算法方面進行研究,通過優化控制策略,提高小車的自主決策能力和作業靈活性,使其能夠在復雜的甘蔗種植環境中高效運行。
在國內,隨著農業機械化進程的加速,對無人甘蔗小車及履帶式底盤行走系統的研究也日益受到重視。近年來,國內眾多科研院校和企業紛紛投入到相關技術的研發中,并取得了一定的進展。廣西大學的研究團隊針對甘蔗壟間復雜的作業環境,提出了一種基于激光雷達和機器視覺的聯合導航方法,通過對采集到的點云數據和圖像信息進行處理和分析,實現了小型移動底盤在甘蔗壟間的自主行走導航 ,有效提高了導航的精度和可靠性。
在履帶式底盤行走系統方面,國內的一些企業也在不斷創新和改進。一些企業研發的橡膠履帶式底盤,采用了新型的橡膠材料和結構設計,提高了履帶的耐磨性和抗老化性能,延長了底盤的使用壽命。同時,在底盤的懸掛系統設計上,采用了自適應懸掛技術,能夠根據不同的地形和負載情況自動調整懸掛參數,提高了底盤的行駛穩定性和乘坐舒適性。
然而,當前國內外在無人甘蔗小車履帶式底盤行走系統的研究中仍存在一些不足之處。在傳感器融合方面,雖然多傳感器融合技術已得到廣泛應用,但不同傳感器之間的數據融合精度和穩定性仍有待提高,尤其是在復雜的甘蔗種植環境下,如光照變化、天氣影響等,傳感器的可靠性和準確性面臨較大挑戰。在智能控制算法方面,現有的算法在處理復雜地形和多變的作業任務時,其適應性和靈活性還不夠,難以滿足無人甘蔗小車在實際作業中的多樣化需求。在底盤的輕量化設計和能源利用效率方面,也存在一定的提升空間,需要進一步研究新型材料和節能技術,以降低底盤的重量和能耗,提高作業效率和續航能力。
1.3 研究內容與方法
1.3.1 研究內容
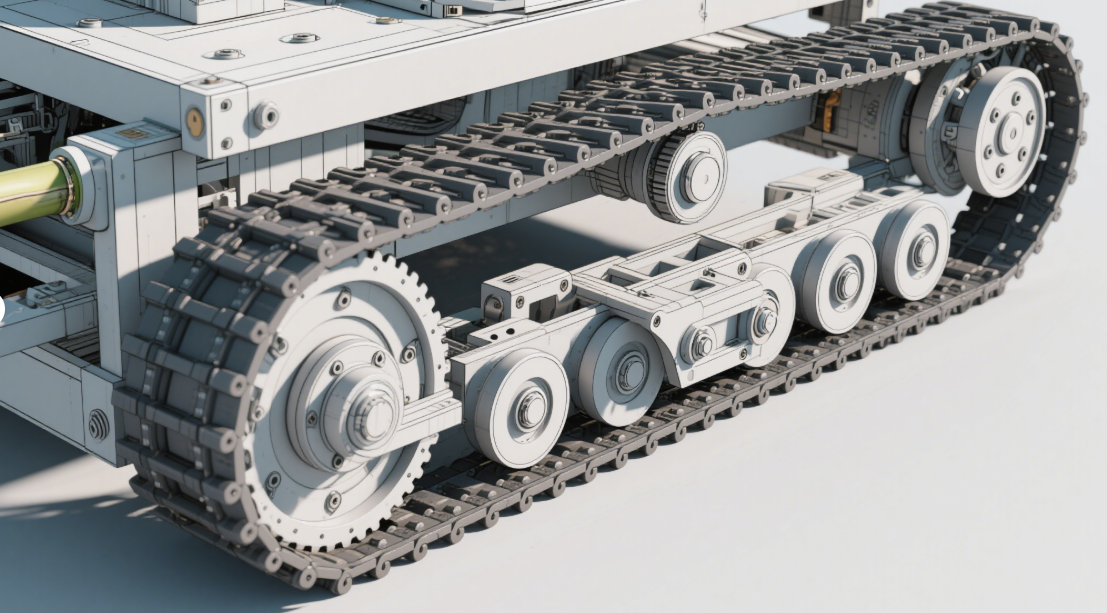
本研究將圍繞無人甘蔗小車履帶式底盤行走系統展開多方面深入探究。首先,對履帶式底盤的結構進行詳細設計與分析。這包括對底盤各部件,如車架、履帶、驅動輪、導向輪、托鏈輪等的結構形式進行研究,確定各部件的材料選擇和尺寸參數。例如,車架需采用高強度且輕量化的材料,以保證在承受各種作業載荷時的結構強度,同時減輕底盤自身重量,提高能源利用效率;履帶則要綜合考慮其材質、節距、寬度等參數,確保其在甘蔗種植地的復雜地形條件下具有良好的抓地力和耐磨性。通過對這些部件的合理設計和優化,實現底盤結構的緊湊性、穩定性和可靠性,為無人甘蔗小車的正常作業提供堅實的基礎 。
在驅動系統方面,將對其進行深入研究與選型。分析不同類型的驅動系統,如電動驅動、液壓驅動、燃油發動機驅動等的工作原理、性能特點和適用場景。電動驅動具有噪音低、無污染、控制精度高等優點,但續航能力可能受限;液壓驅動則具有輸出扭矩大、響應速度快的特點,但系統較為復雜,成本較高;燃油發動機驅動功率大、續航時間長,但存在噪音大、排放污染等問題。根據無人甘蔗小車的作業需求和實際工況,綜合考慮動力性能、能源消耗、成本等因素,選擇最適合的驅動系統,并對其關鍵部件,如電機、液壓泵、發動機等進行選型和參數匹配。同時,還將研究驅動系統的傳動方式,如鏈傳動、帶傳動、齒輪傳動等,確定最佳的傳動方案,以確保動力的高效傳遞和穩定輸出。
對于行走系統的控制策略,本研究將進行深入探討與優化。引入先進的傳感器技術,如激光雷達、攝像頭、毫米波雷達、慣性測量單元(IMU)等,實現對無人甘蔗小車周圍環境信息和自身狀態信息的實時感知。利用這些傳感器采集的數據,結合全球定位系統(GPS)和地理信息系統(GIS),研究高精度的導航算法,實現無人甘蔗小車在甘蔗種植園中的自主導航和路徑規劃。例如,基于激光雷達的點云數據,采用基于密度的空間聚類與噪聲應用(DBSCAN)算法進行環境感知和障礙物識別,通過 A * 算法等路徑搜索算法規劃出最優的行駛路徑。同時,研究智能控制算法,如自適應控制、模糊控制、神經網絡控制等,實現對無人甘蔗小車行走速度、轉向角度等參數的精準控制,使其能夠在復雜多變的作業環境中靈活、穩定地運行。此外,還將考慮多機協同作業的情況,研究多輛無人甘蔗小車之間的通信和協作機制,實現它們在大規模甘蔗種植園中的高效協同作業 。
在性能測試與優化方面,將對無人甘蔗小車履帶式底盤行走系統進行全面的性能測試,并根據測試結果進行優化改進。搭建模擬甘蔗種植地環境的試驗平臺,在不同的地形條件,如平地、坡地、松軟土地等,以及不同的作業工況,如滿載、空載、高速行駛、低速轉向等情況下,對行走系統的各項性能指標,如行駛速度、牽引力、通過性、穩定性、能耗等進行測試。通過對測試數據的分析,找出行走系統存在的問題和不足之處,針對這些問題提出相應的優化措施。例如,通過改進履帶的花紋設計,提高其在松軟土地上的抓地力和通過性;優化懸掛系統的參數,提高底盤在行駛過程中的穩定性和舒適性;調整驅動系統的控制策略,降低能耗,提高能源利用效率。同時,還將進行實際田間試驗,進一步驗證優化后的行走系統在真實甘蔗種植環境中的性能表現,確保其能夠滿足甘蔗種植作業的實際需求。
1.3.2 研究方法
本研究將綜合運用多種研究方法,確保研究的全面性、科學性和可靠性。文獻研究法是本研究的基礎,通過廣泛查閱國內外相關文獻資料,包括學術期刊論文、學位論文、專利文獻、技術報告等,了解無人甘蔗小車履帶式底盤行走系統的研究現狀和發展趨勢。對已有的研究成果進行梳理和總結,分析當前研究中存在的問題和不足之處,為本研究提供理論基礎和研究思路。例如,通過對國內外關于履帶式底盤結構設計、驅動系統、控制策略等方面的文獻研究,了解不同技術方案的優缺點,為后續的研究提供參考和借鑒 。
理論分析方法將貫穿研究的始終。運用機械原理、機械設計、材料力學、動力學等相關學科的理論知識,對履帶式底盤行走系統的結構設計、驅動系統選型、控制策略制定等進行理論分析和計算。例如,在底盤結構設計中,運用材料力學知識對車架等部件進行強度和剛度計算,確保其在各種載荷作用下的安全性;在驅動系統選型中,根據無人甘蔗小車的作業需求和行駛工況,運用動力學原理計算所需的驅動力、扭矩等參數,為驅動系統關鍵部件的選型提供依據;在控制策略制定中,運用自動控制原理分析控制系統的穩定性、響應速度等性能指標,為控制算法的設計和優化提供理論支持 。
仿真模擬方法將是本研究的重要手段之一。利用專業的仿真軟件,如 ADAMS、ANSYS、MATLAB/Simulink 等,對無人甘蔗小車履帶式底盤行走系統進行建模和仿真分析。在 ADAMS 軟件中建立底盤的多體動力學模型,模擬其在不同地形和工況下的行駛過程,分析底盤各部件的受力情況和運動特性,為結構優化提供依據;在 ANSYS 軟件中對底盤關鍵部件進行有限元分析,模擬其在各種載荷作用下的應力和應變分布,評估部件的強度和可靠性,指導材料選擇和結構設計;在 MATLAB/Simulink 軟件中搭建驅動系統和控制系統的仿真模型,對不同的控制策略進行仿真驗證,分析其控制效果和性能指標,優化控制算法。通過仿真模擬,可以在實際制造和試驗之前,對行走系統的性能進行預測和評估,減少試驗次數,降低研究成本,提高研究效率 。
實驗研究方法是檢驗研究成果的關鍵環節。根據研究方案,制造無人甘蔗小車履帶式底盤行走系統的樣機,并進行一系列的實驗測試。包括在實驗室環境下進行的性能測試實驗,如驅動系統的性能測試、傳感器的精度測試、控制系統的功能測試等,以及在實際甘蔗種植地進行的田間試驗。通過實驗測試,獲取真實的數據和反饋信息,驗證理論分析和仿真模擬的結果,對行走系統進行優化和改進。例如,在田間試驗中,觀察無人甘蔗小車在實際作業環境中的行駛情況、導航精度、作業效果等,收集相關數據,分析行走系統在實際應用中存在的問題,針對性地進行調整和優化,確保其能夠滿足甘蔗種植作業的實際需求 。
)





)












