獲取方式見文末,可開發+票
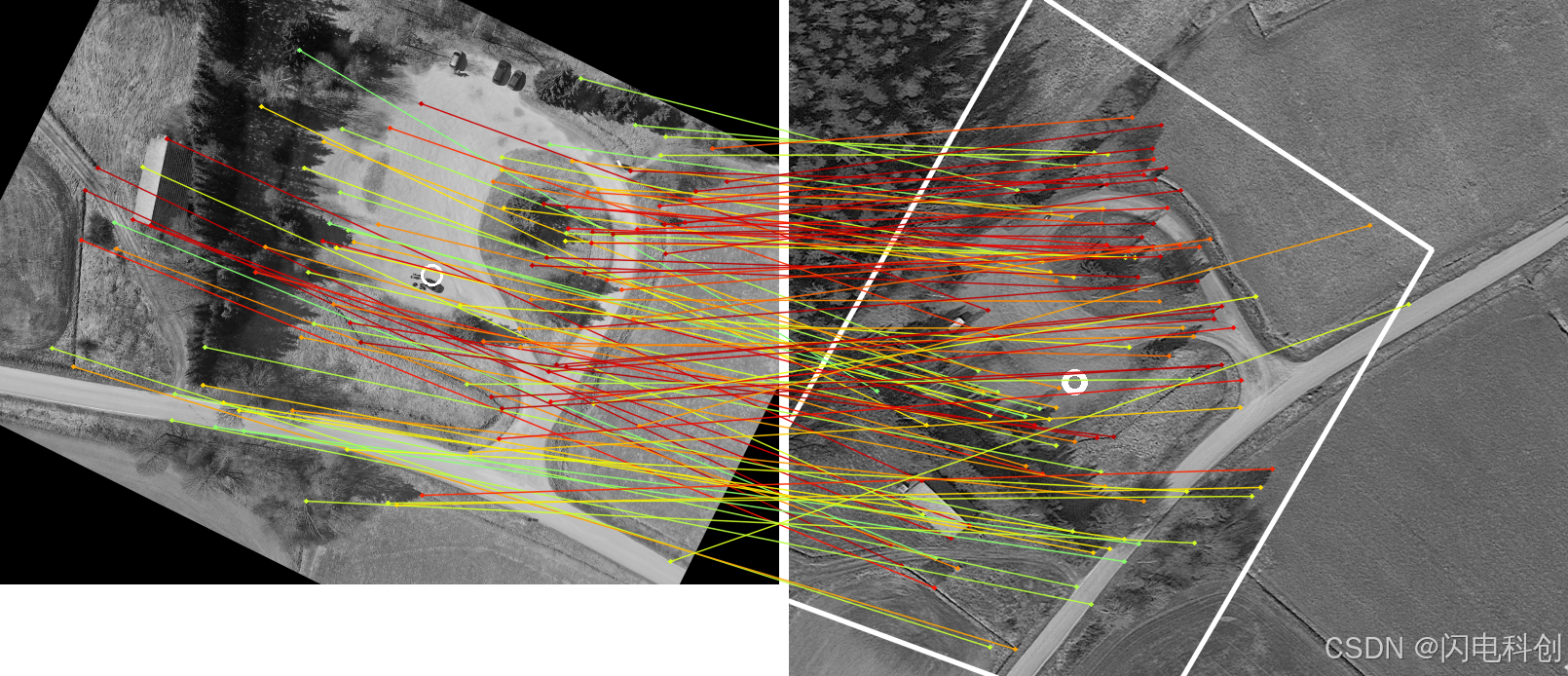
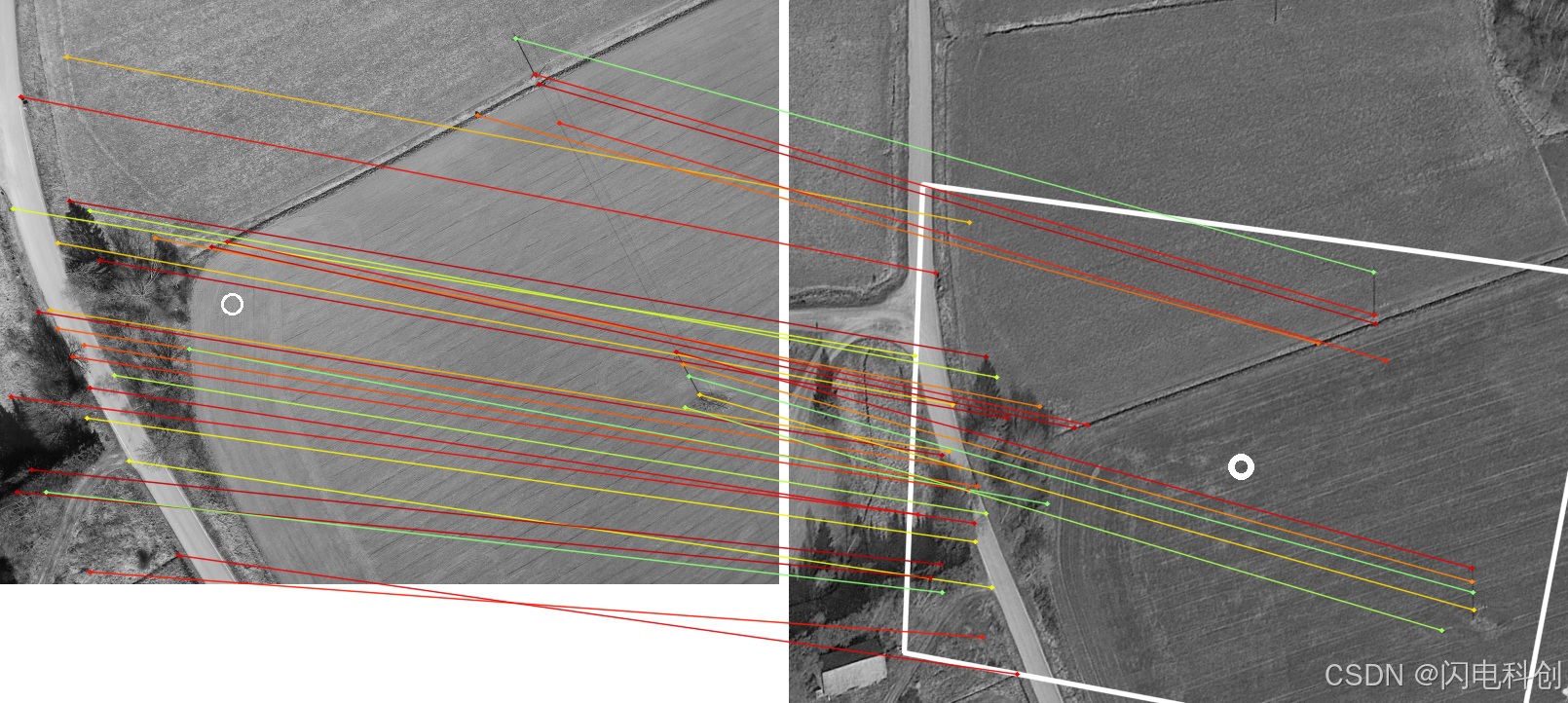
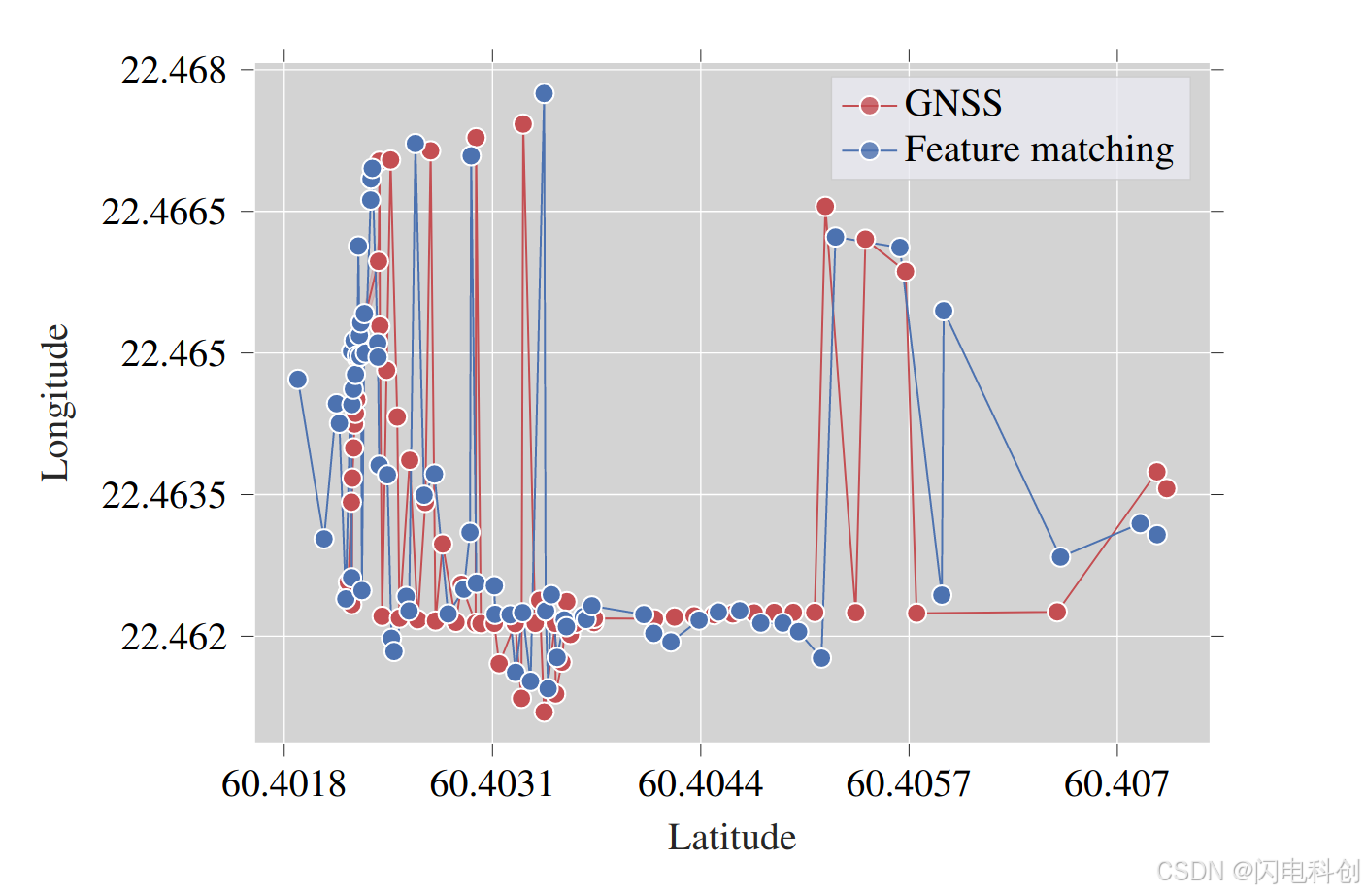
隨著無人機在工業和科研領域應用的加速發展,在非城市環境中使用無gnss、基于視覺的方法進行無人機定位的需求日益增長。本文提出了一種基于視覺的定位算法,利用深度特征計算無人機在野外飛行的地理坐標。該方法基于匹配無人機相機捕獲的RGB圖像和由地理參考開源衛星圖像組成的預構建地圖的部分區域的顯著特征。實驗結果表明,基于視覺的定位方法具有與傳統gnss定位方法相當的定位精度。與目前最先進的視覺里程計(VO)方法相比,該方法適用于長距離、高空的無人機飛行。
計算機人工智sci/ei會議/ccf/核心,擅長機器學習,深度學習,神經網絡,語義分割等計算機視覺,精通大小論文潤色修改,代碼復現,創新點改進等等







)











