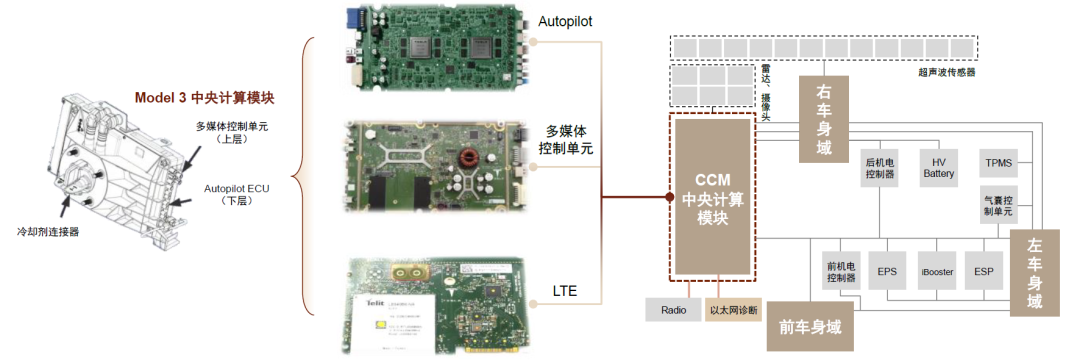
目前網絡上對Tesla自動駕駛硬件(AP1-AP4、HW1.0-HW4.0)迭代的相關介紹比較混亂,本文這里進行系統化梳理并澄清,并對一些錯誤進行更正。
1、AutoPilot HW迭代圖
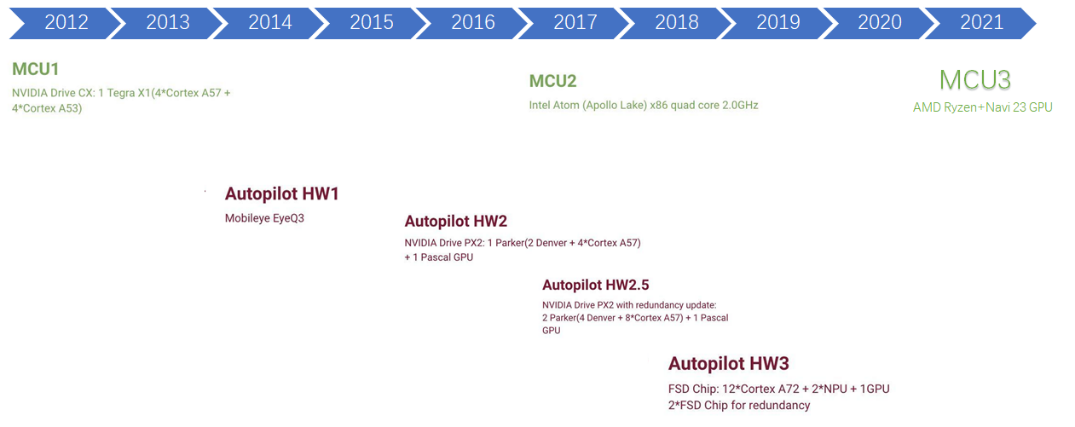
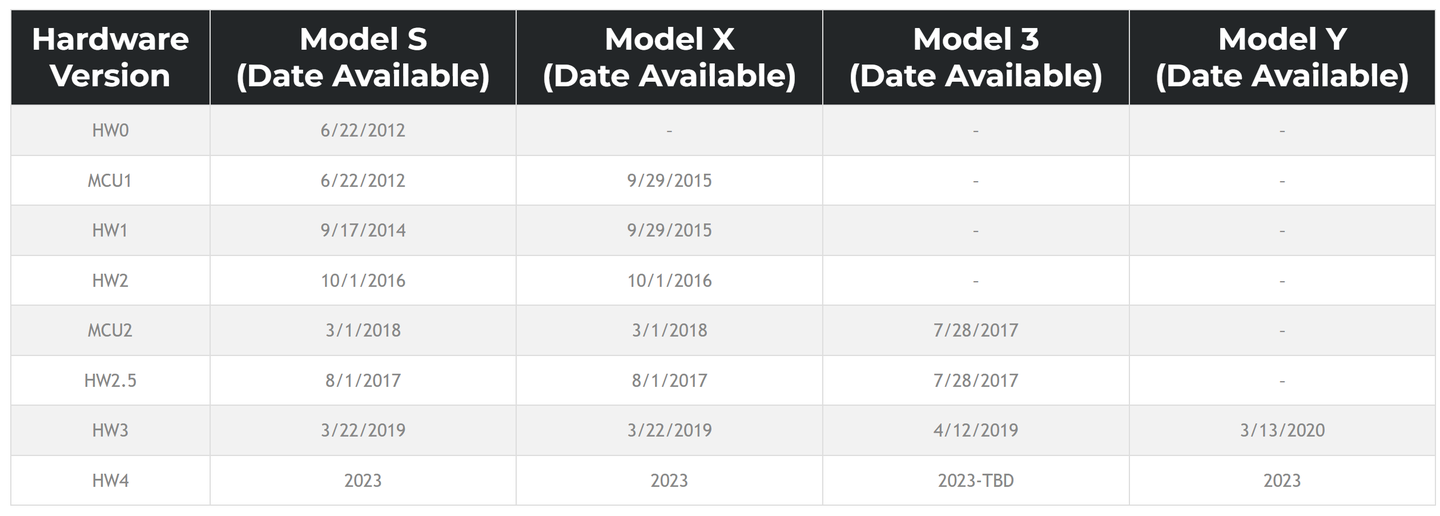
上面的圖中沒有包含AutoPilot HW4.0,下圖列出了從AutoPilot HW1.0 到AutoPilot HW4.0的迭代情況,以及MCU1到MCU3的迭代情況(左下角的表格)。
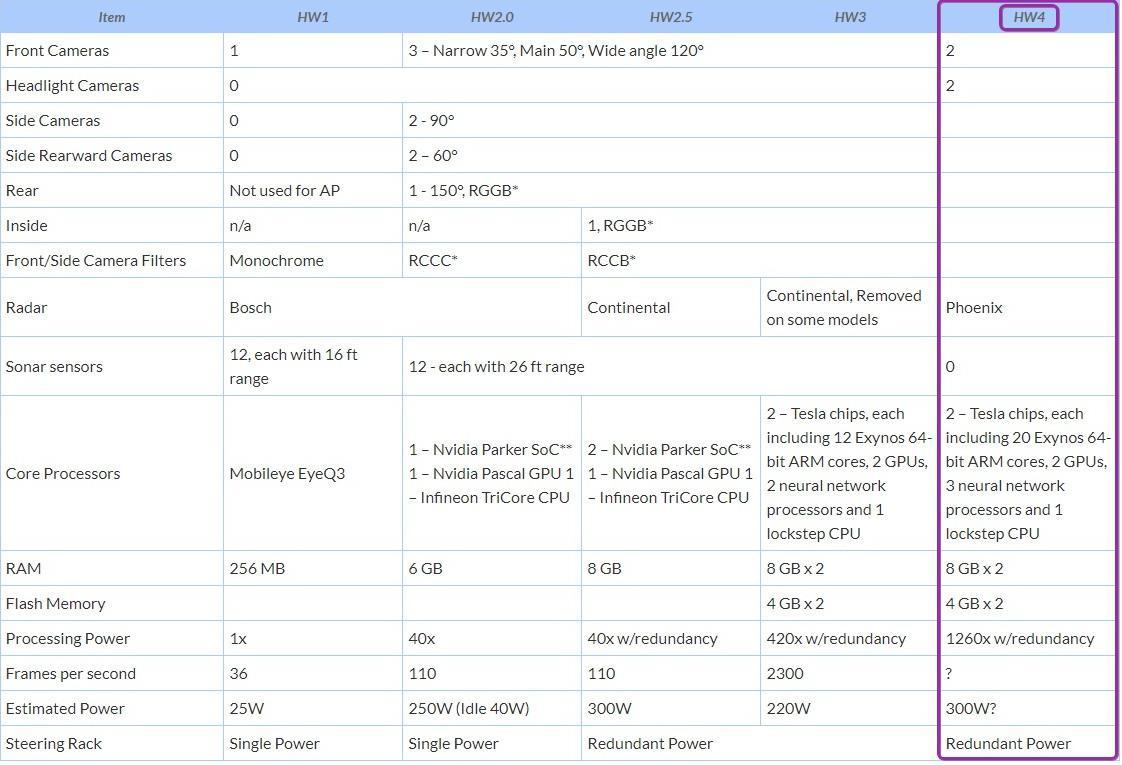
下表中列出了從AutoPilot HW1.0 到AutoPilot HW4.0域控以及配套傳感器的迭代情況。但是HW4的信息,下表沒有列完整。
Ref:https://teslatap.com/articles/autopilot-processors-and-hardware-mcu-hw-demystified/
自駕域控 | Camera | USS | Radar | |
|---|---|---|---|---|
HW1.0 | Mibleye Q3 | Front Camera(黑白)*1; | 12(5m) | 1(160m博世) |
HW2.0 | Drive PX2 | Camera(RCCC)*8: | 12(8m) | 1(160m博世) |
HW2.5 | Drive PX2 | Camera(RCCB)*8: | 12(8m) | 1(大陸170m) |
HW3.0 | TESLA FSD1代(14nm)*2 | Camera(RCCB)*8: | 12(8m) | 1(大陸170ms)部分車型取消 |
HW4.0 | TESLA FSD2代(7nm)*2 | Camera(RGGB)*11: | 無?? | 1(自研4D Radar) |
AutoPilot Hardware (AP)
硬件發布 | 年 | 常用名 |
AP1 | 2014年10月 – 2016年10月 | AP1、HW1、AutoPilot1、Mobileye AutoPilot |
AP2 | 2016年10月 – 2017年7月 | AP2、HW2、AutoPilot2 |
AP2.5 | 2017年7月 – 2019年4月 | AP2.5、HW2.5、AutoPilot2.5 |
AP3 | 2019年4月 – 2023年 | AP3,HW3,全自動駕駛 (FSD) |
AP4 | 2023年 | AP4、HW4、FSD 2 |
Ref:https://hk.evoffer.com/blog/introducing-car-computer/
Ref:https://www.findmyelectric.com/tesla-autopilot-ultimate-guide/
Ref:https://teslatap.com/articles/autopilot-processors-and-hardware-mcu-hw-demystified/
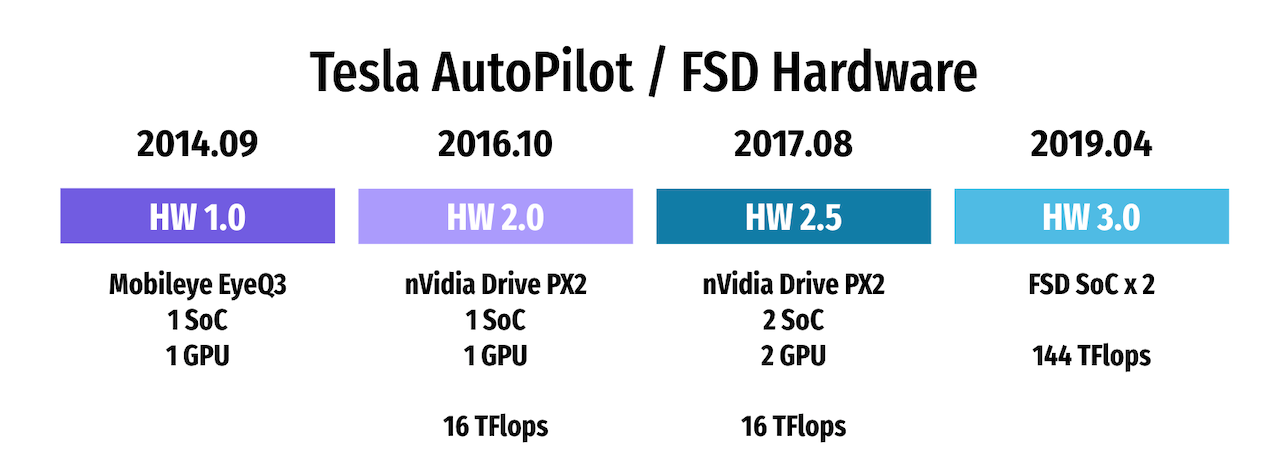
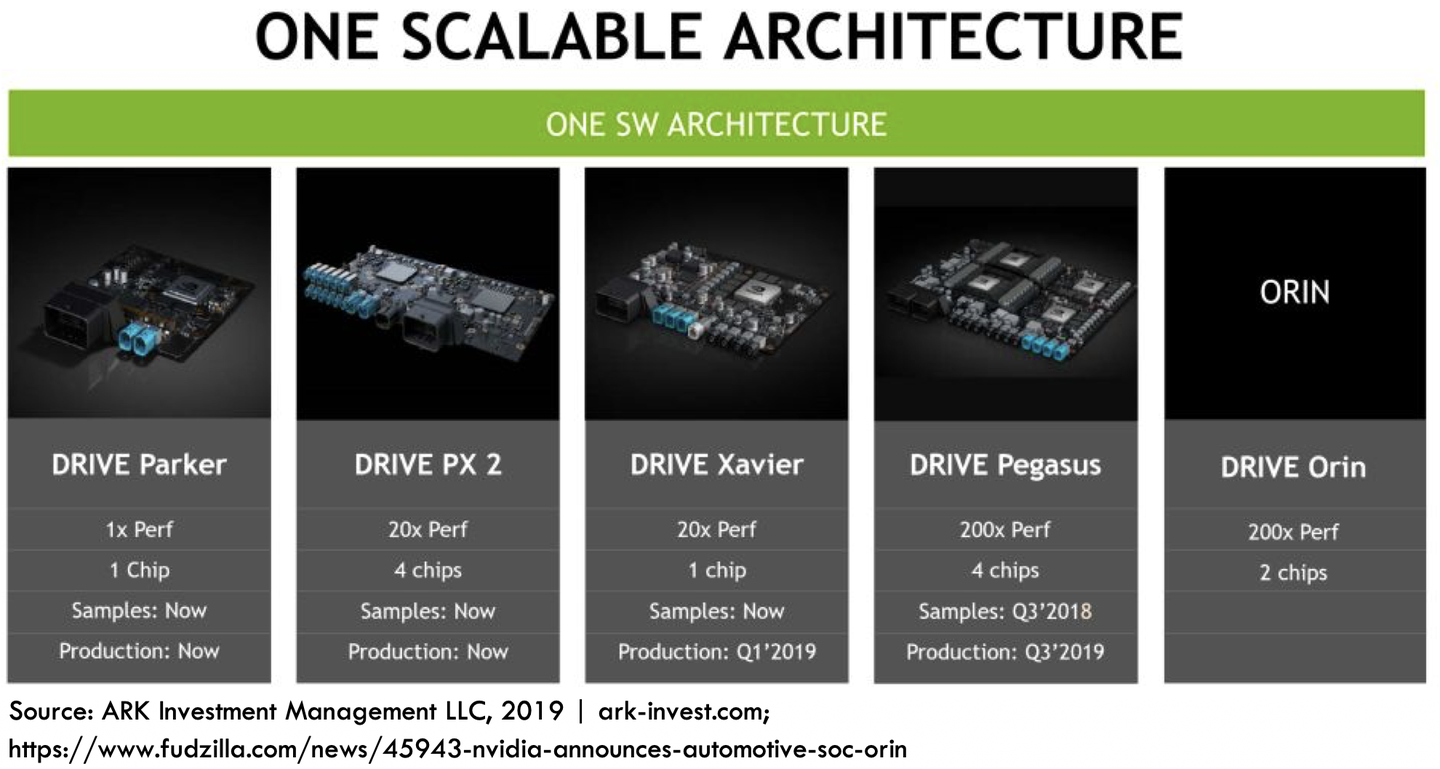
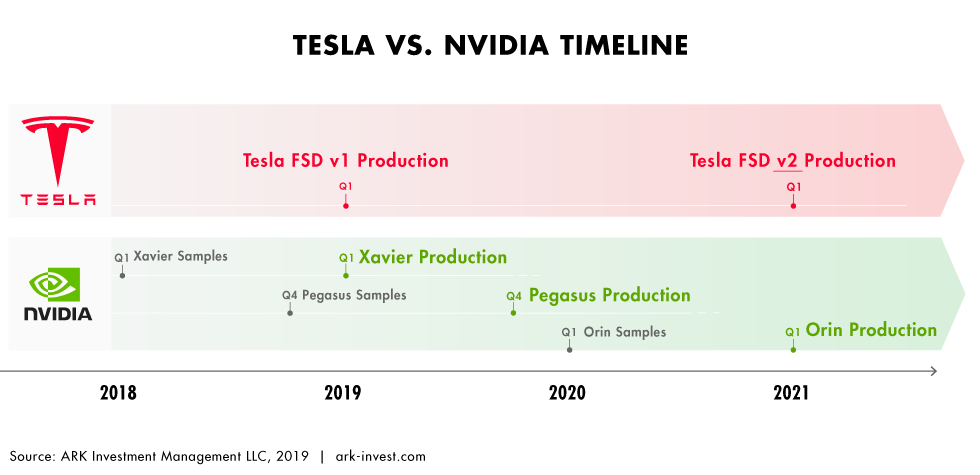
在自動駕駛領域,從第一代 Autopilot HW1 的 Mobileye Eye Q3;迭代到第二代的 Autopilot HW2,主要采用了Nvidia 的 Drive PX2,這里應用了一顆 Parker 和 Pascal GPU;在一年之后又迭代為 2 顆 Parker 和 Pascal GPU,即Autopilot HW2.5;而到了第三代特斯拉進入了芯片領域,采用了自己的 FSD 芯片;后續到第四代,特斯拉升級了自己的FSD芯片。
每代的詳細情況,如下:
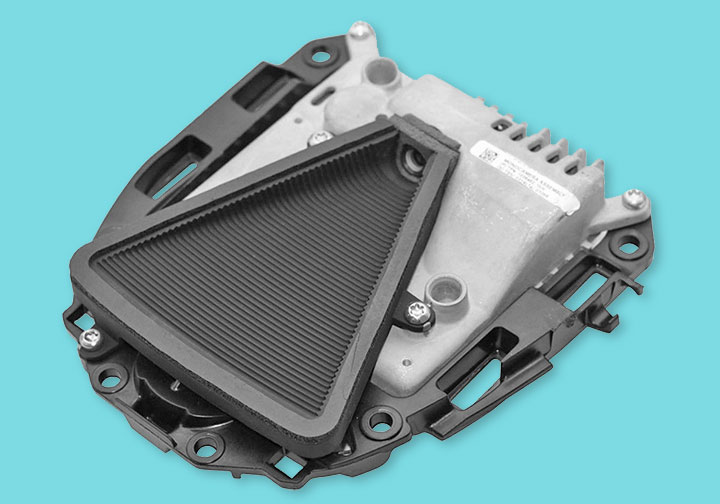
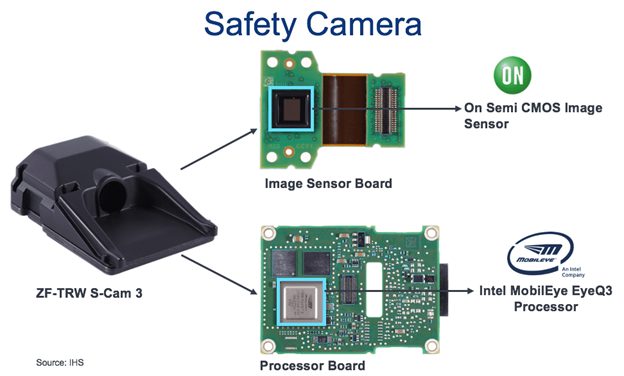
2、AP1 HW1.0 – Mobileye EyeQ3
基于Mobileye芯片的第一代駕駛輔助硬件。它使用了Mobileye EyeQ3平臺,全車共1個單色攝像頭,單個前向毫米波雷達和12個超聲波傳感器,毫米波雷達是由博世提供,攝像頭布置于后視鏡附近,硬件選型都是基于市場上成熟的供應商產品,在HW1.0階段特斯拉的主要工作是多傳感器融合+應用層軟件開發。
最初的 Autopilot 系統于 2014 年發布,并在 Model S 和 Model X 上配備。
它配備了一個前置攝像頭和雷達來感知環境。
AP1 車輛于 2014 年至 2016 年生產。
AP1 的功能有限,包括交通感知巡航控制和自動駕駛。
AP1 Hardware Suite:
Front camera (single monochrome)
Front radar with range of 525 feet / 160 meters (Bosch Mid-range radar sensor)
12 ultrasonic sensors with 16 ft range / 5 meters
Rear camera for driver only (not used in Autopilot)
Mobileye EyeQ3 computing platform
AP1 Core features:
Traffic-Aware Cruise Control (TACC), start & stop
Autosteer (closed-access roads, like freeways)
Auto Lane Change (driver initiated)
Auto Park
Summon
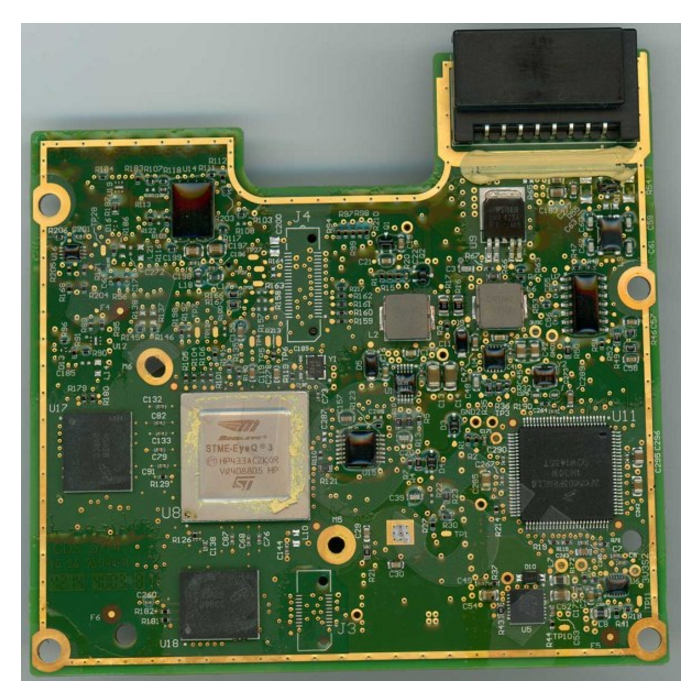
以上雷達目標和視覺目標都在Mobileye EyeQ3平臺中處理,12個超聲的處理不確定是否在Mobileye EyeQ3中。
3、AP2 HW2.0 – Nvidia Drive PX 2: 1 Parker SoC+1 Pascal GPU
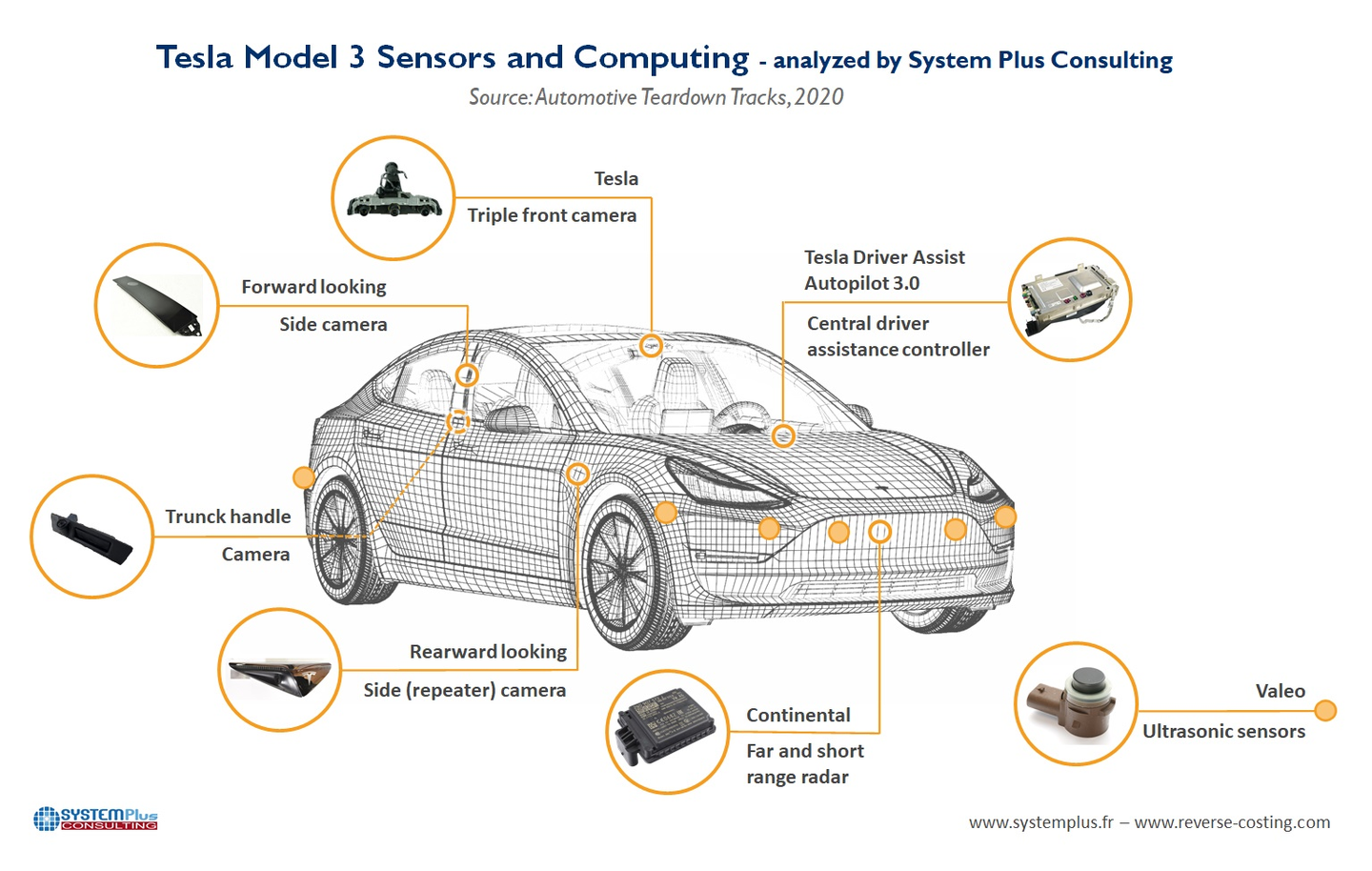
Tesla 于2016 年7 月宣布(嫌Mbileye 太慢)自行開發全自動駕駛技術,基于Nvidia的Drive PX2系統打造了一個全新的AP2 硬件(位于手套箱下方),同時傳感器數量大幅提升,使用8個攝像頭,12個遠程超聲波傳感器和一個前置毫米波雷達,這套傳感器配置為特斯拉FSD功能打下良好的基礎,現在回看當時的特斯拉傳感器布局的前瞻性。特斯拉基于英偉達Drive PX2開發一個全新的駕駛輔助硬件,MCU芯片采用英飛凌TriCore系列產品,毫米波雷達仍然是博世產品,該駕駛輔助硬件安裝于手套箱下方,這個階段特斯拉掌握圖像識別算法+多傳感器融合+應用層軟件開發。
AP2 的八個攝像頭安裝在了車輛周圍,可提供 360 度全景視野,并配備了更強大的計算技術,而 AP1 則僅使用一個前置攝像頭和雷達。雖然AP2并沒有立即釋放所有潛在功能,但這使 AP2 能夠執行更復雜的操作,原因如下:
3、AP2 HW2.0 – Nvidia Drive PX 2: 1 Parker SoC+1 Pascal GPU
Tesla 于2016 年7 月宣布(嫌Mbileye 太慢)自行開發全自動駕駛技術,基于Nvidia的Drive PX2系統打造了一個全新的AP2 硬件(位于手套箱下方),同時傳感器數量大幅提升,使用8個攝像頭,12個遠程超聲波傳感器和一個前置毫米波雷達,這套傳感器配置為特斯拉FSD功能打下良好的基礎,現在回看當時的特斯拉傳感器布局的前瞻性。特斯拉基于英偉達Drive PX2開發一個全新的駕駛輔助硬件,MCU芯片采用英飛凌TriCore系列產品,毫米波雷達仍然是博世產品,該駕駛輔助硬件安裝于手套箱下方,這個階段特斯拉掌握圖像識別算法+多傳感器融合+應用層軟件開發。
AP2 的八個攝像頭安裝在了車輛周圍,可提供 360 度全景視野,并配備了更強大的計算技術,而 AP1 則僅使用一個前置攝像頭和雷達。雖然AP2并沒有立即釋放所有潛在功能,但這使 AP2 能夠執行更復雜的操作,原因如下:
更好的傳感器套件:新的攝像頭、雷達和超聲波傳感器可以實現更好的物體和車道標記檢測。
改進的自動駕駛和車道保持功能:車道保持能力提升,尤其是在高速公路上。
首次推出召喚和自動泊車功能:更先進的泊車功能,可實現遠程駕駛。
采用Machine Learning Neural Network 令汽車可以不斷跟據之前行駛路段學習。
AP2 Hardware Suite:
Front cameras (3 cameras, medium, narrow and wide angle)
Side cameras (4 total, 2 forward and 2 rear-facing, on each side)
Rear camera (1 rear-facing)
Front radar with range of 525 feet / 160 meters (Bosch Mid-range radar sensor)
12 ultrasonic sensors with 26 ft range / 8 meters
NVIDIA DRIVE PX 2 AI computing platform
AP2 Core features:
Traffic-Aware Cruise Control (TACC), start & stop
Autosteer (closed-access roads, like freeways)
Auto Lane Change (driver initiated)
Navigate on Autopilot (on-ramp to off-ramp)
Auto Park
Summon
智慧召喚– Smart Summon
NoA – 自動駕駛導航
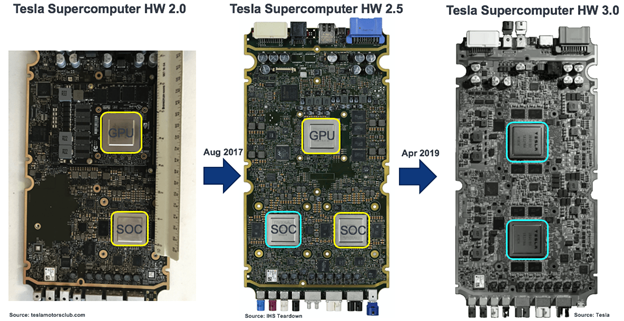




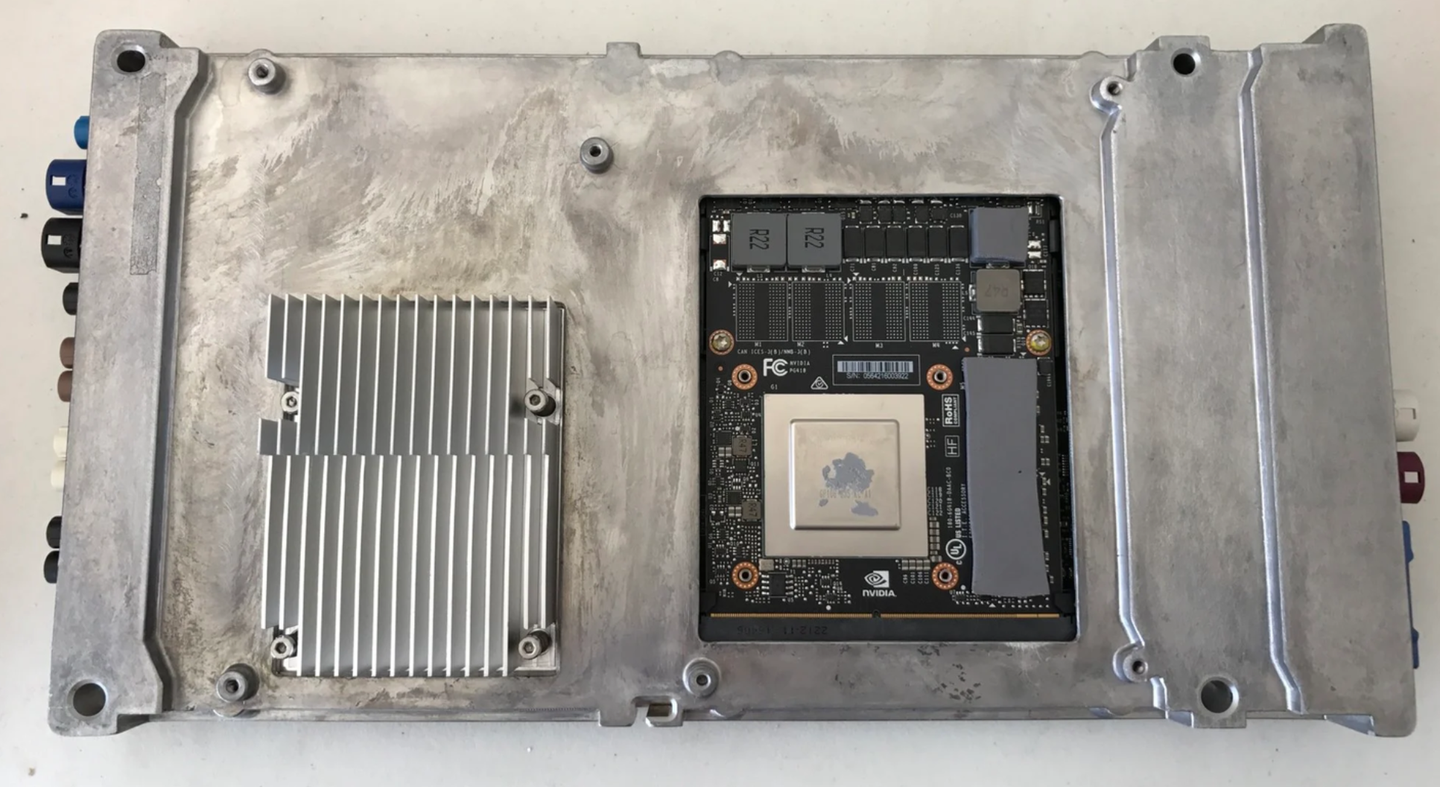


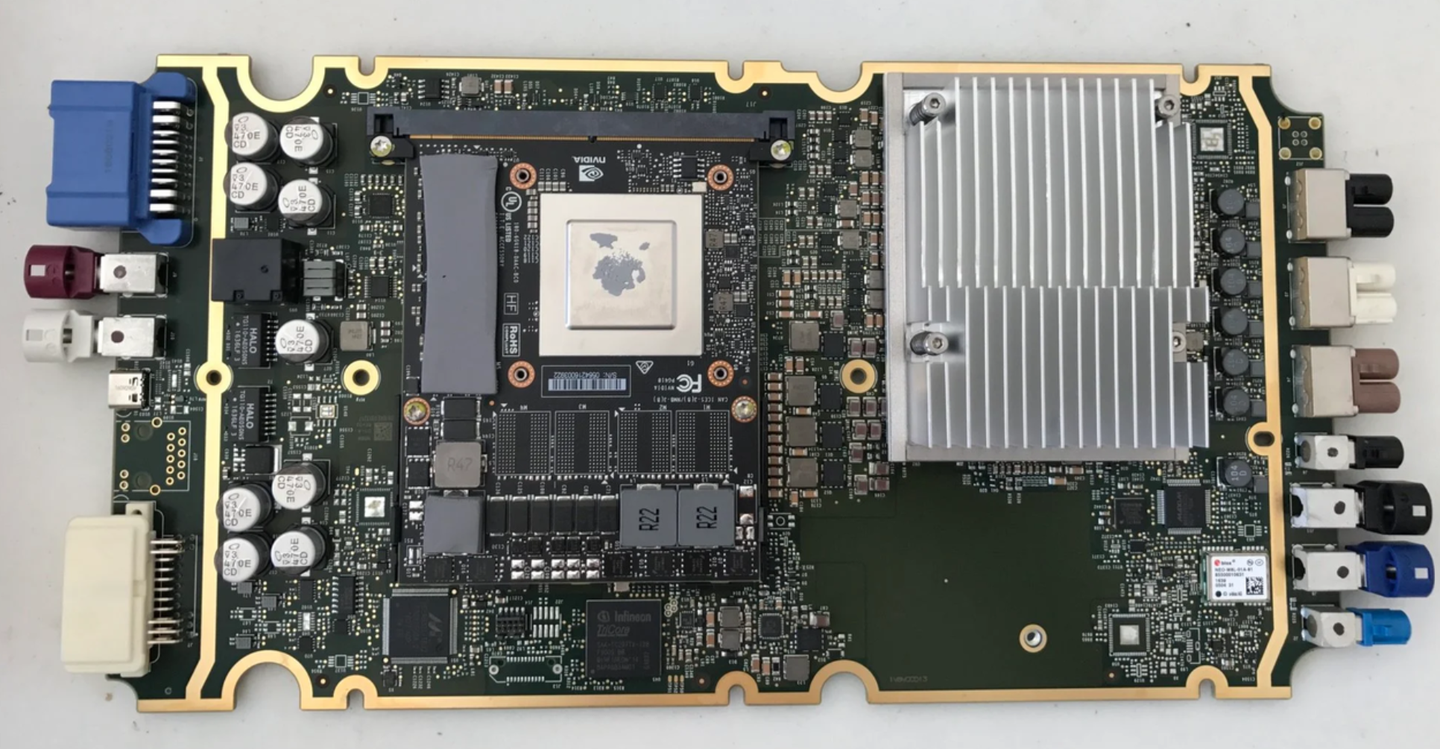
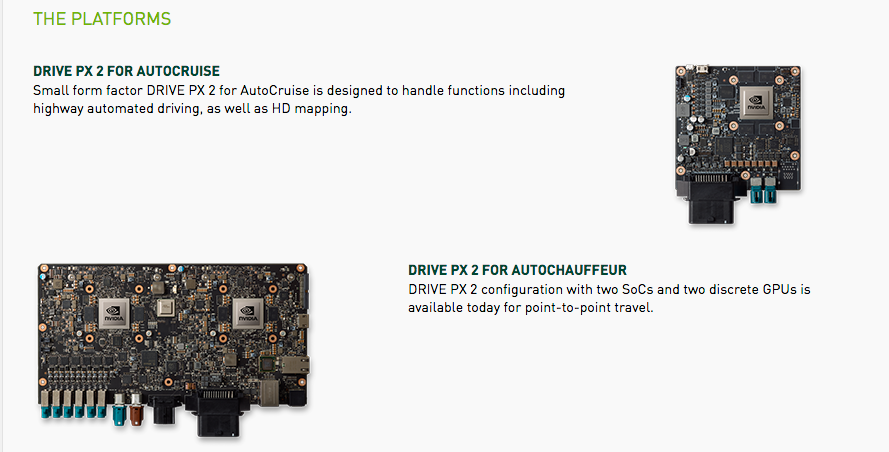
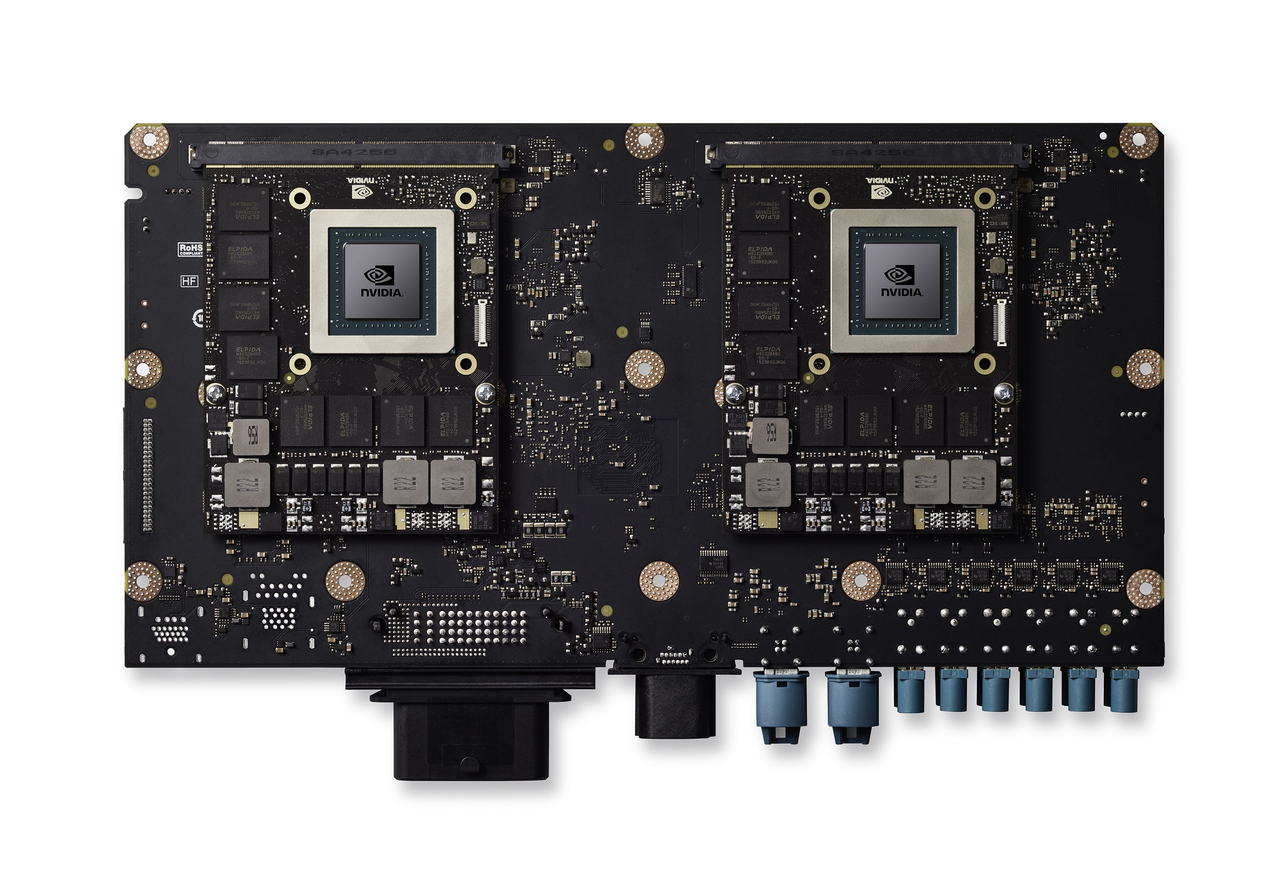
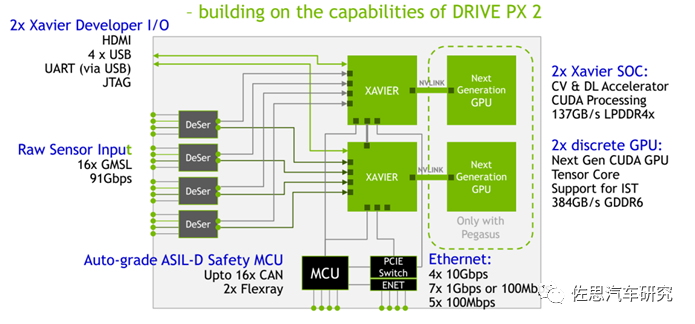
需要明確的是 HW2.0 的方案是1 Parker SoC+1 Pascal GPU;而圖23和圖24并沒有在實際產品中出現。
Ref:https://teslamotorsclub.com/tmc/threads/inside-the-nvidia-px2-board-on-my-hw2-ap2-0-model-s-with-pics.91076/
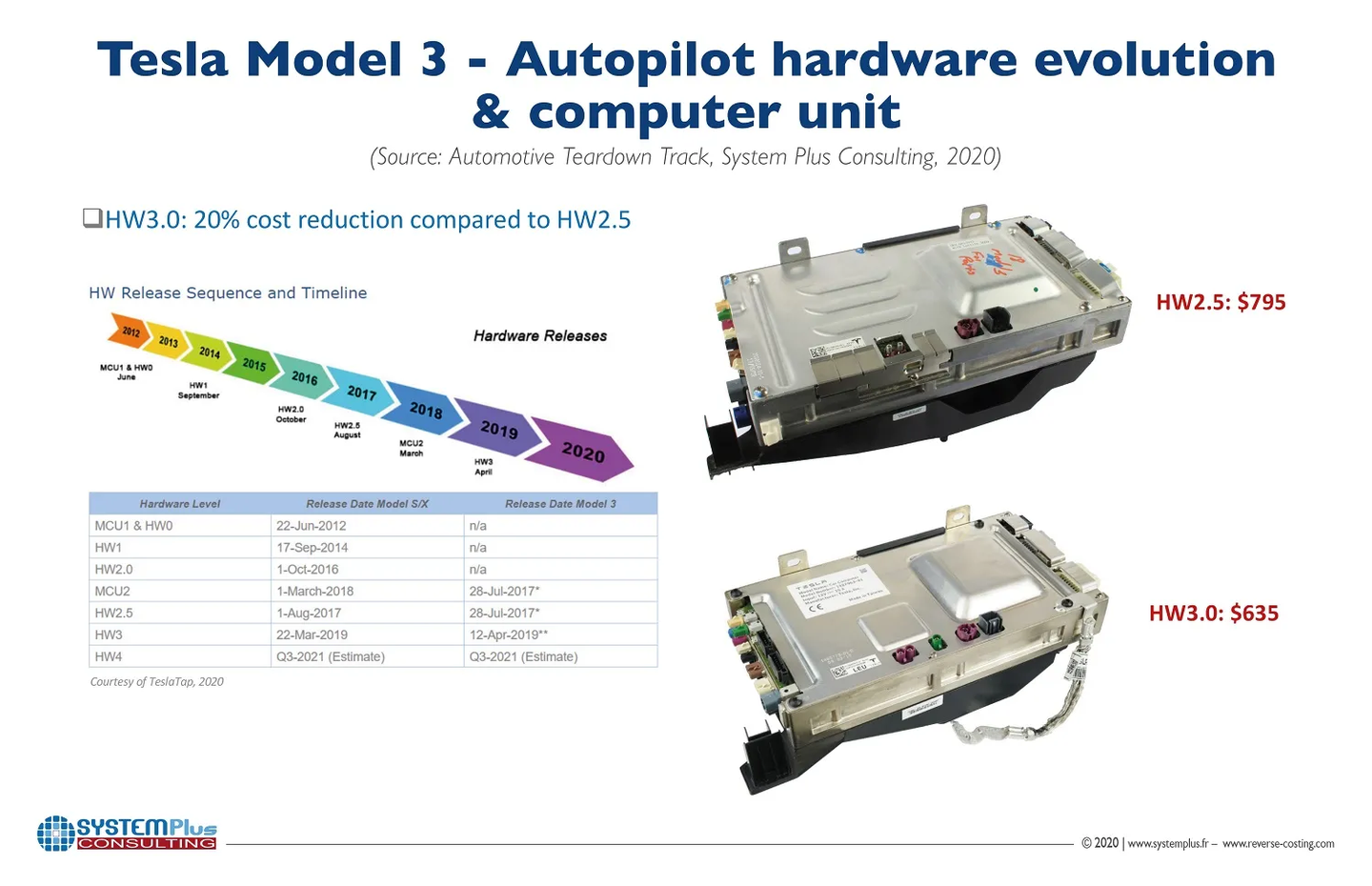
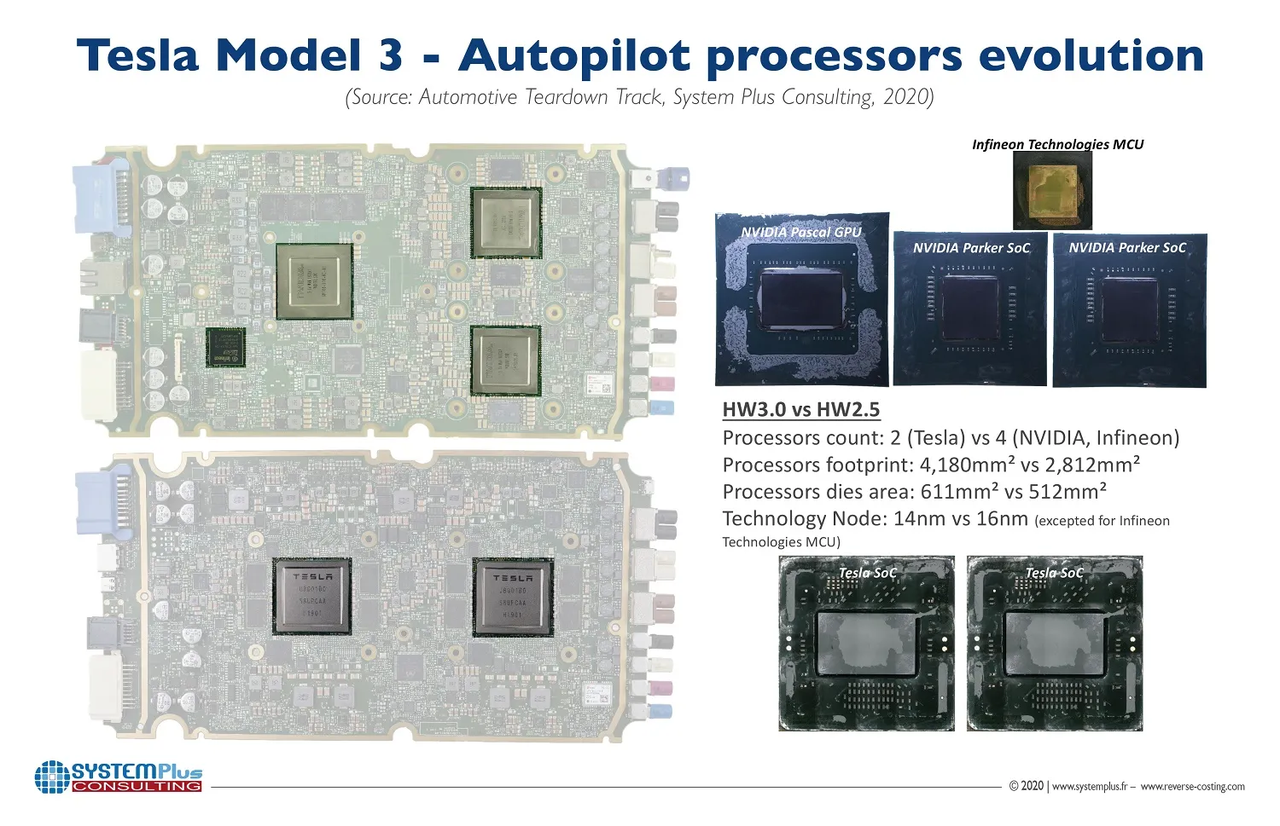
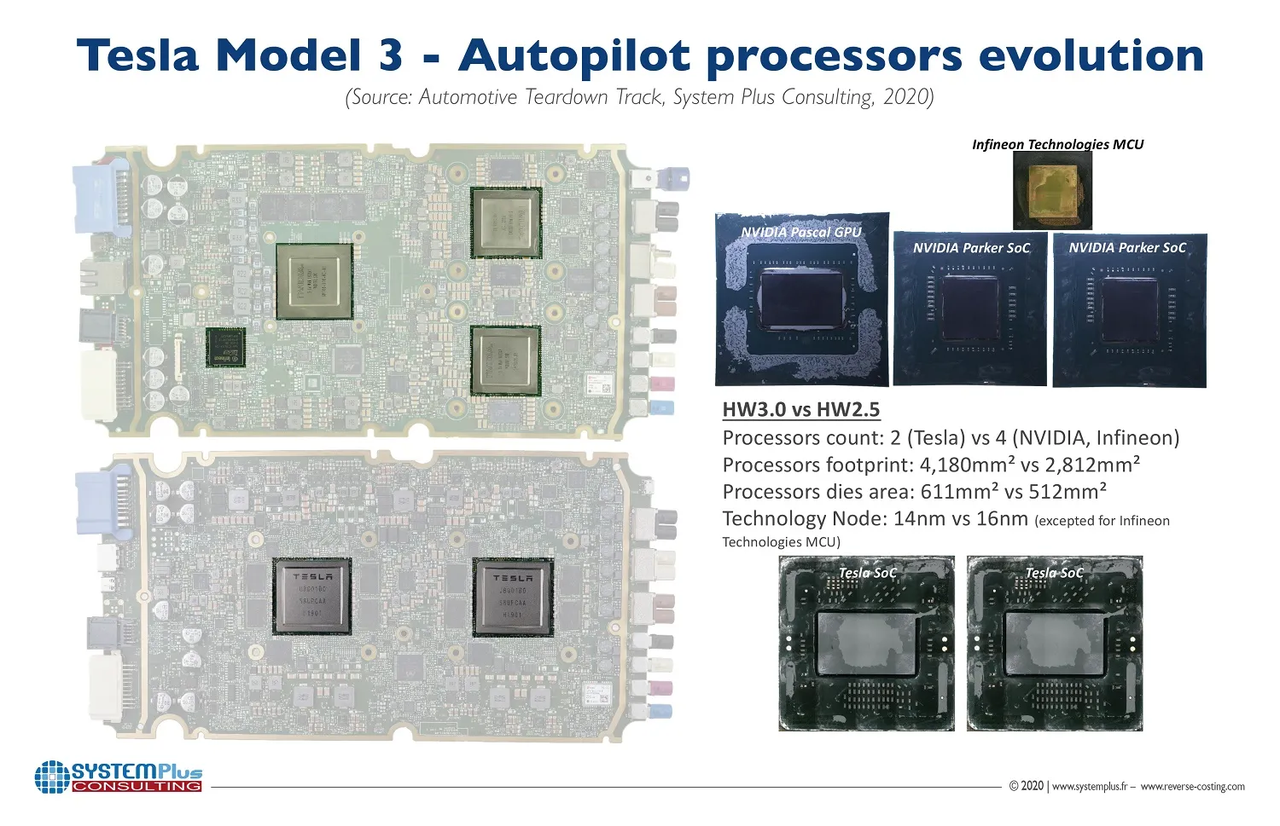
4、AP2.5 HW2.5 – Nvidia Drive PX 2:2*Parker SoC+1 Pascal GPU
AutoPilot2.5 (AP2.5) – 系統升級于 2017 年年中推出,在 AP2 的基礎上進行了小幅改進。雖然計算機處理能力和傳感器集成度有所提升,但硬件基本保持不變。AP2.5 中更強大的機載計算機增強了AutoPilot的整體功能和可靠性。
提高處理能力:更強大的車載計算機可以實現更快的數據處理,從而提高車輛的決策速度和準確性。
略微改進的攝像頭和傳感器:為了提高性能和集成度,對攝像頭和傳感器進行了微調。
正在進行的自動駕駛和召喚開發:盡管 AP2.5 仍然缺乏特斯拉所追求的復雜功能,但它增強了現有的功能。
到 AP2.5 發布時,特斯拉已經開始解鎖更多高級功能,例如 Summon(使車輛能夠自行駛出停車位或到達車主所在地)和 Autopilot 穿越(可以穿越高速公路立交橋和出口)。 傳感器升級:主要將前置雷達換成更長距離既Continental Advanced Radar Sensor ARS410 及將黑白鏡頭換成彩色鏡頭,功能上與AP2 并無很大差異;
HW2.5是對HW2.0的一個小版本更新,主要用于冗余和略微提高的可靠性。從1 Parker SoC+1 Pascal GPU升級到2 Parker SoC+1 Pascal GPU;
另外AP2.5版本還新增兩個功能:行車記錄儀和帶有本地保存視頻的哨兵模式。
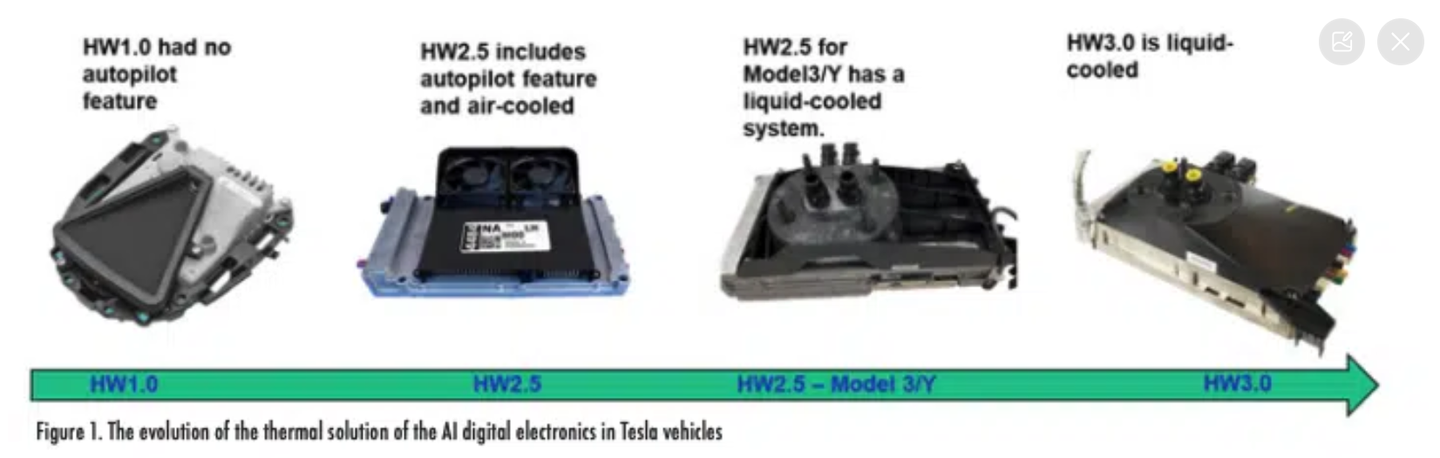
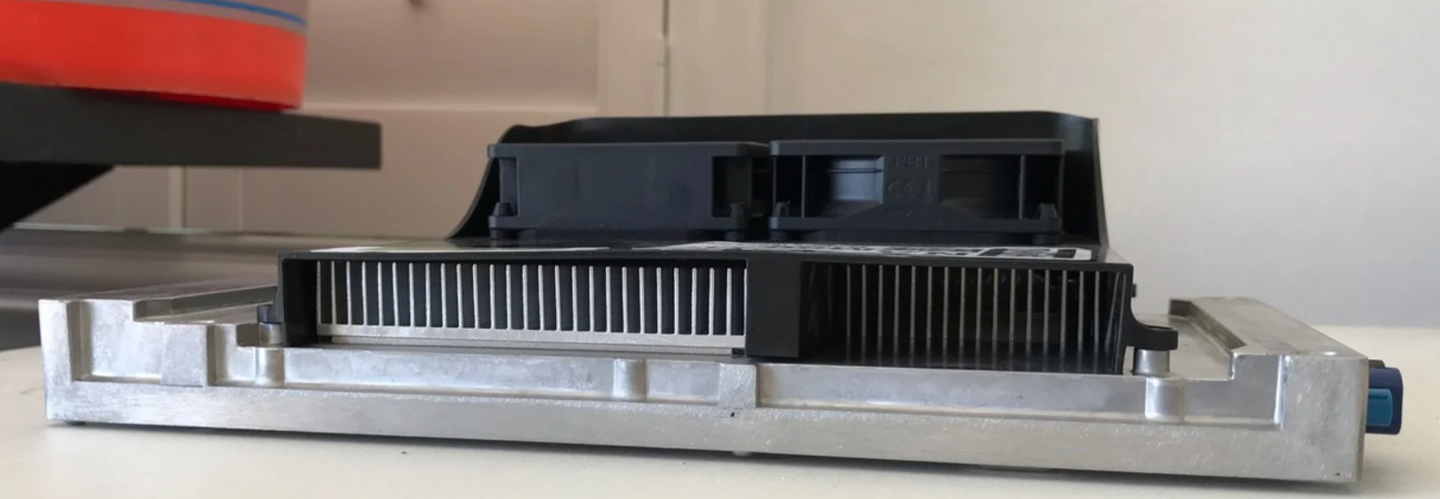
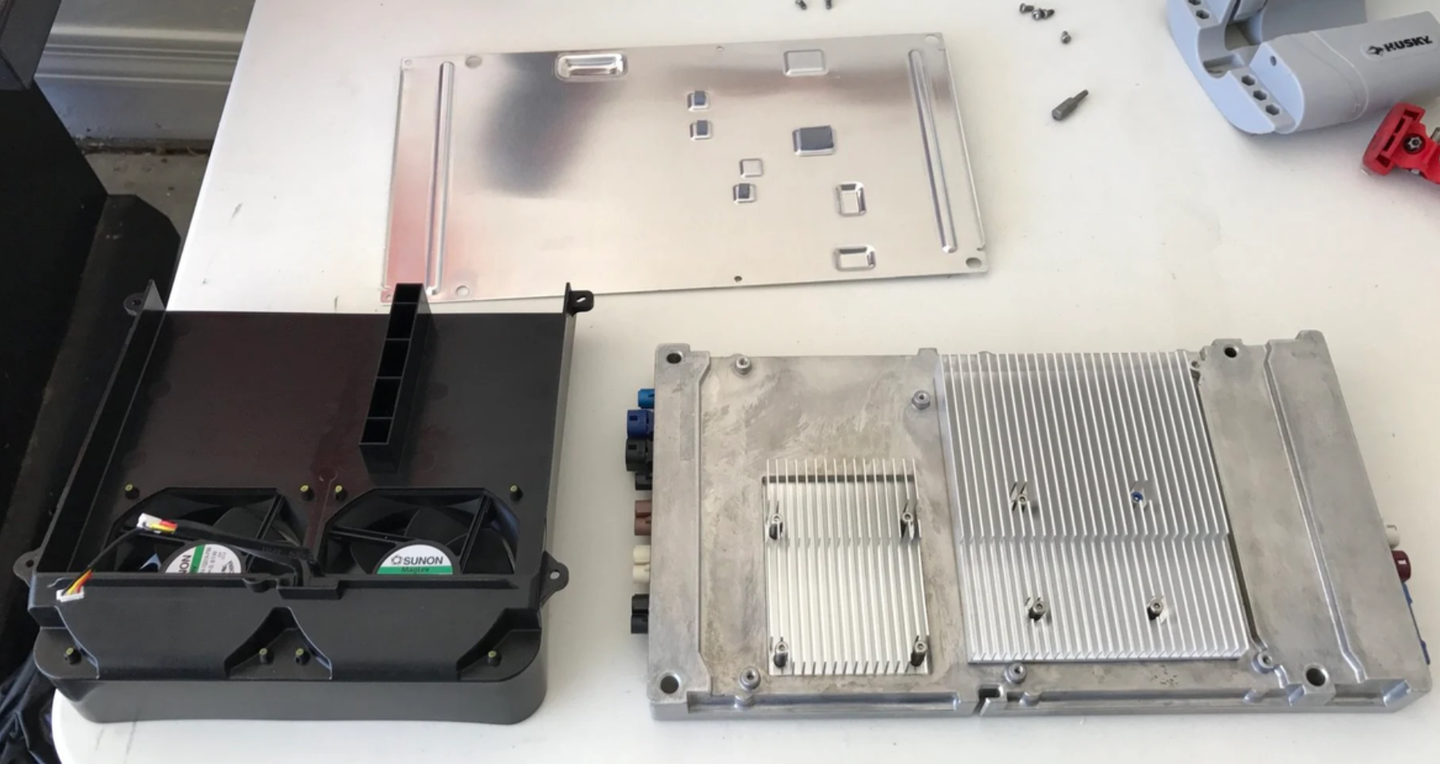
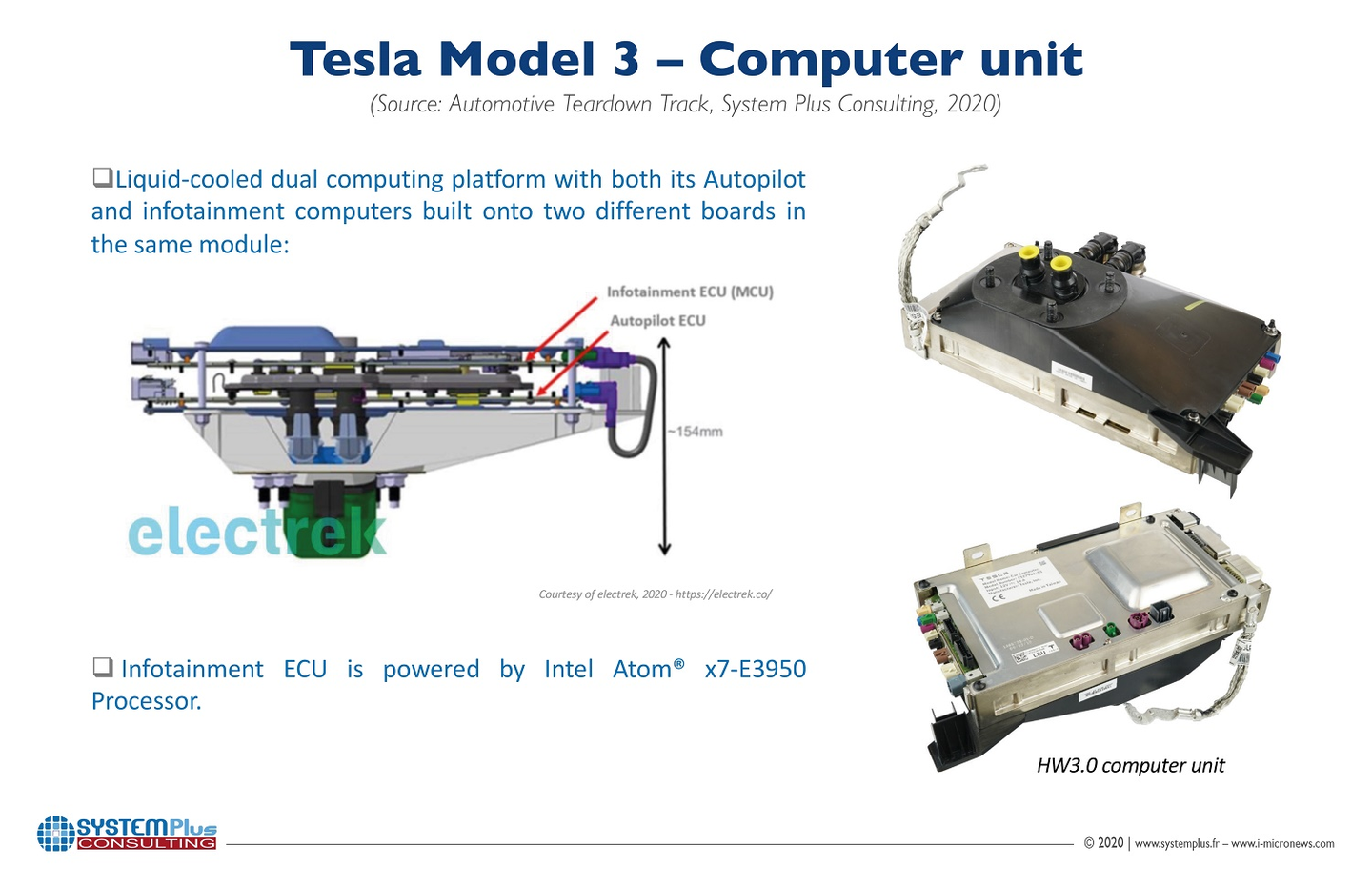
另外HW2.5開始使用汽車冷卻液回路中的液體冷卻而不是風扇。
Ref:https://news.eeworld.com.cn/qcdz/ic495216.html
5、AP3 HW3.0 – FSD一代
特斯拉在 AP3 中開始區分 Autopilot 和全自動駕駛 (FSD) 套件。盡管 Autopilot 3.0 仍然只是部分自動駕駛,但隨著特斯拉致力于打造一個能夠執行更復雜任務的系統,這是邁向完全自動駕駛的重要一步。 Autopilot 3.0 的顯著特點包括完全自動駕駛計算機(FSD),這是一種專門的人工智能芯片,可以分析比之前技術更多的數據,使特斯拉能夠不斷改進其自動駕駛汽車軟件。
更快的數據處理:通過更快地處理傳感器數據,新計算機可以更精確、更平穩地控制車輛的移動。
使用AutoPilot進行導航改進:特斯拉開始為AutoPilot導航提供越來越復雜的功能,包括在很少的用戶交互下自動駛出匝道和自動變換車道。
其他全自動駕駛功能(測試版):特斯拉的 FSD Beta 功能可讓車輛在城市街道上自動駕駛、轉彎、在停車標志處停車以及在更復雜的路口行駛,并可由 AP3 硬件支持。
Autopilot 2.5 和 3.0 不僅在硬件方面有所不同,在軟件功能方面也存在差異。提高自動化程度所需的復雜機器學習和神經網絡可以由 AP3 的計算機處理。
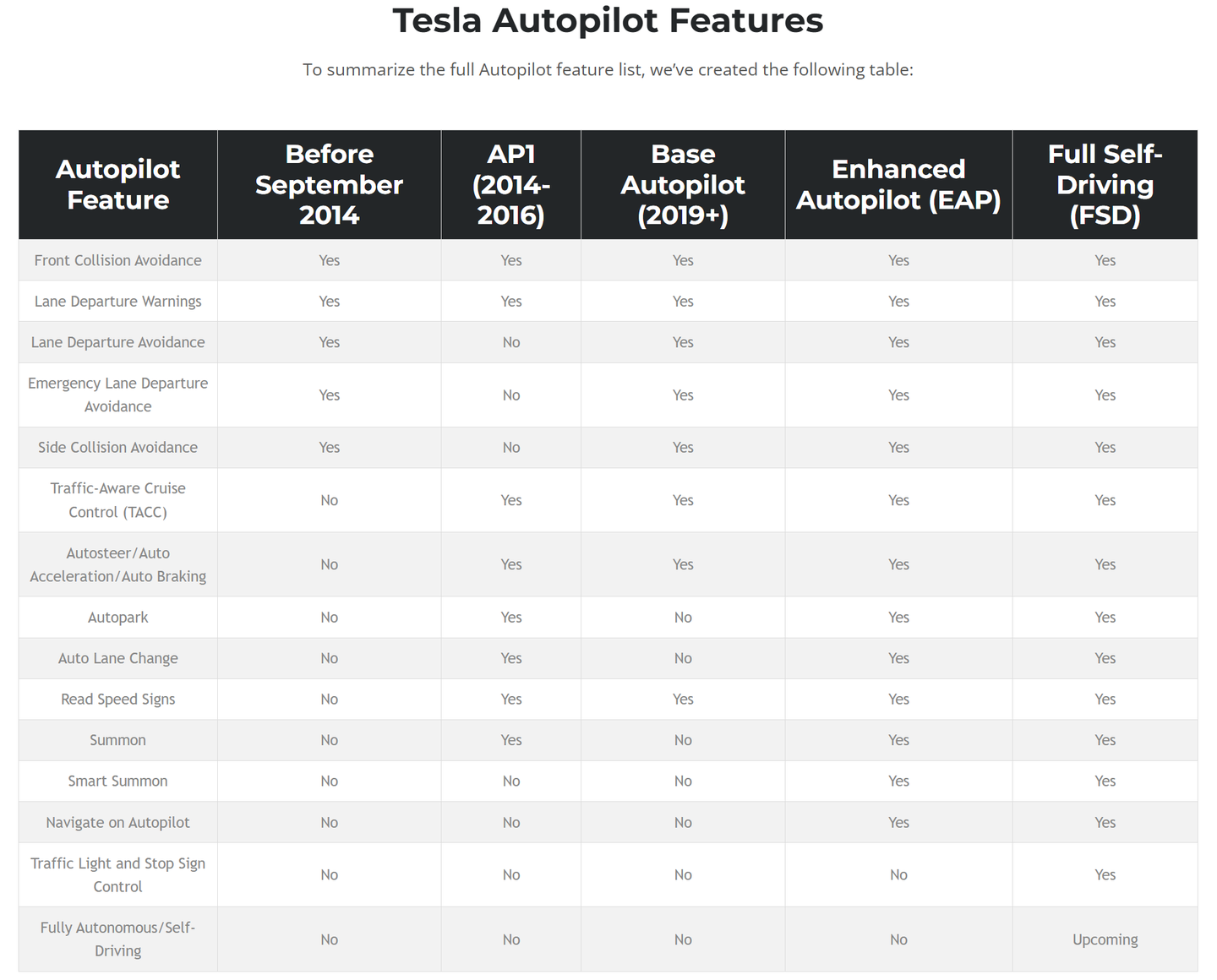
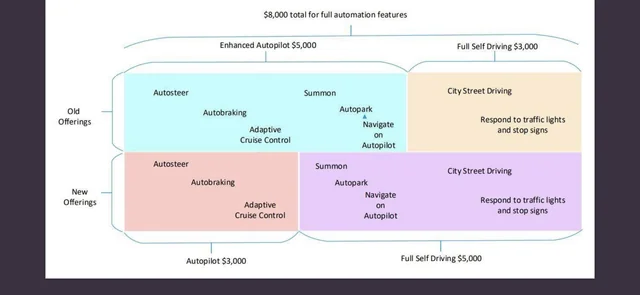
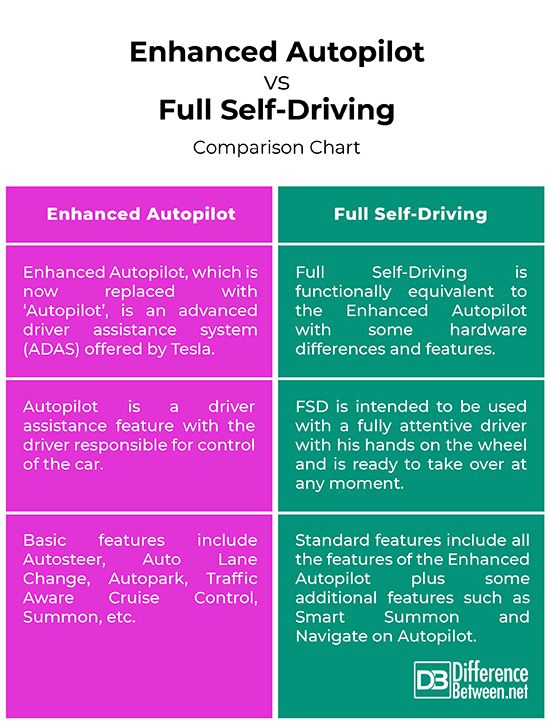
增強型AutoPilot是特斯拉汽車的可選駕駛輔助系統。(圖7中的EAP)
該系統使用多種傳感器,包括超聲波傳感器、攝像頭和 GPS,實現自動轉向、速度調節和自動停車等功能。
增強型AutoPilot允許車輛制動并調整速度,這使其成為自動駕駛功能的關鍵特性。
Ref:https://news.eeworld.com.cn/qcdz/ic495216.html
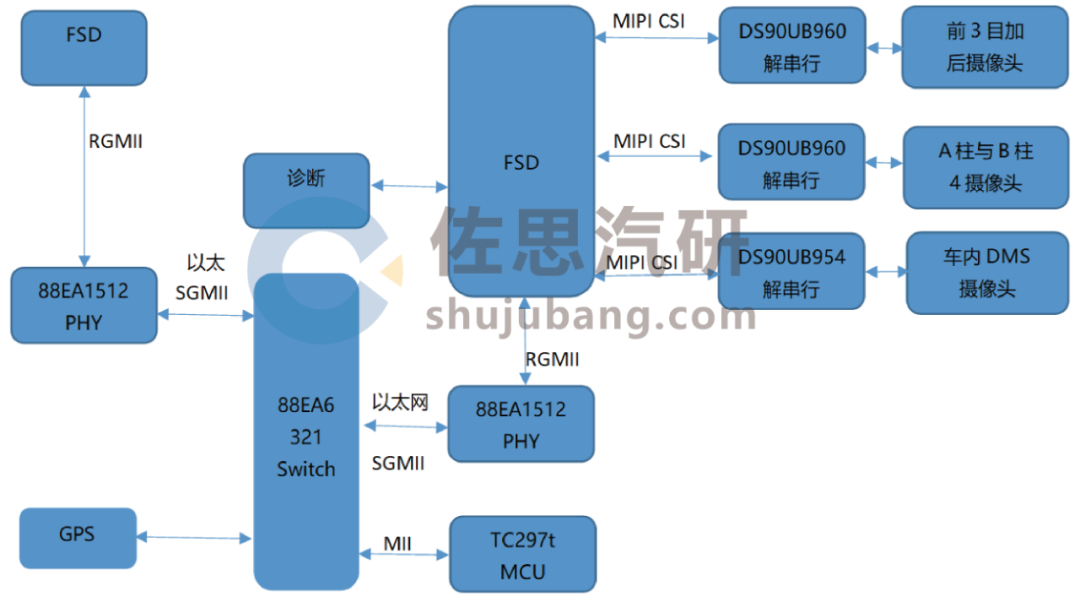
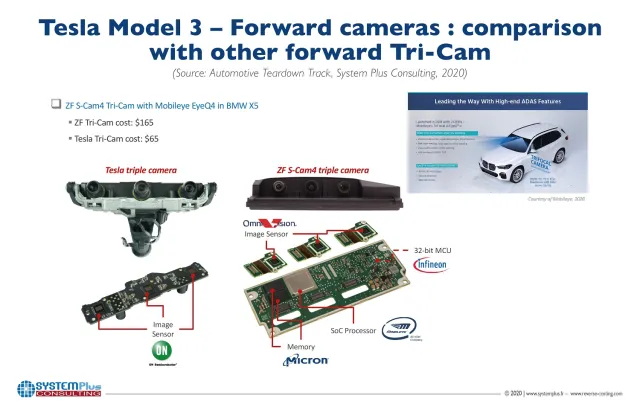
8個Camera的Image Sensor均采用AR0136AT
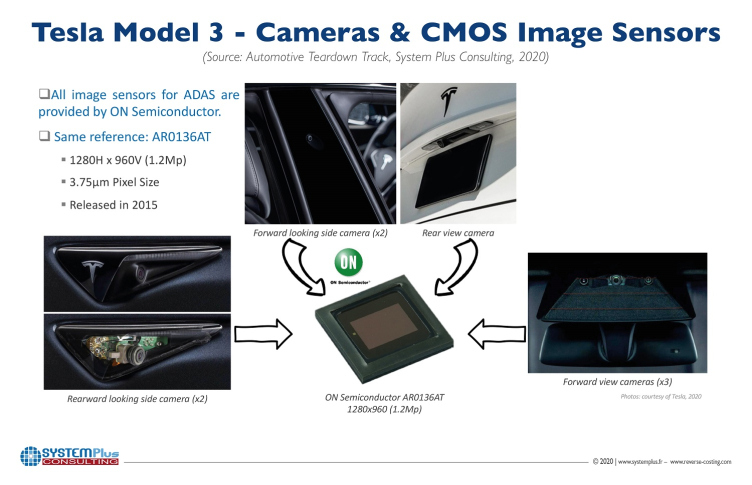
只更換鏡頭,就可以配置不同的FOV和探測距離的Camera

不在Camera端進行圖像處理,Camera只負責采集,數據處理放到自駕域控中,Camera端的成本下降比較大

Tesla 于2018 年底曾經宣布自行開發AP 硬件,棄用其他廠牌晶片,而AP3 則是其完全自主研發的AP 電腦,Tesla 稱之為Full Self-Driving Computer (FSD Computer)。此組晶片于2019 年4 月正式用于全線Tesla 品牌汽車上。現有AP2 或AP2.5 車主如已購買全自動駕駛配置,將可以免費升級硬件。 AP3 可用功能包括:
定速巡航 – Traffic-Aware Cruise Control
自動轉向– Autosteer
自動切線– Auto Lane Change
自動泊車– Auto Park
召喚– Summon
智慧召喚– Smart Summon
NoA – 自動駕駛導航
Tesla 于2021 年低調將AP 硬件更新至3.2 版本(Part # 1566786-S1-C),暫時網上極少資料及討論,估計系提升MCU 及AP 電腦之間既資料傳輸速度。
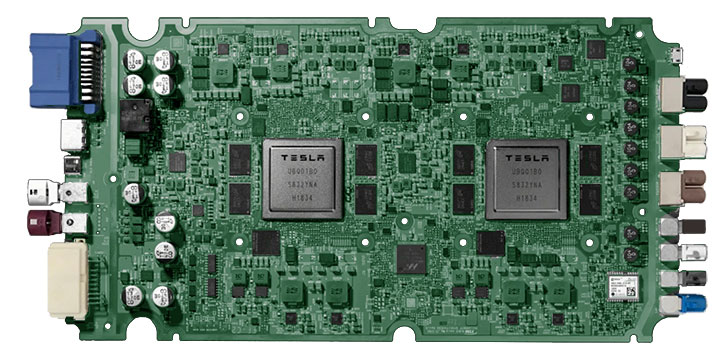
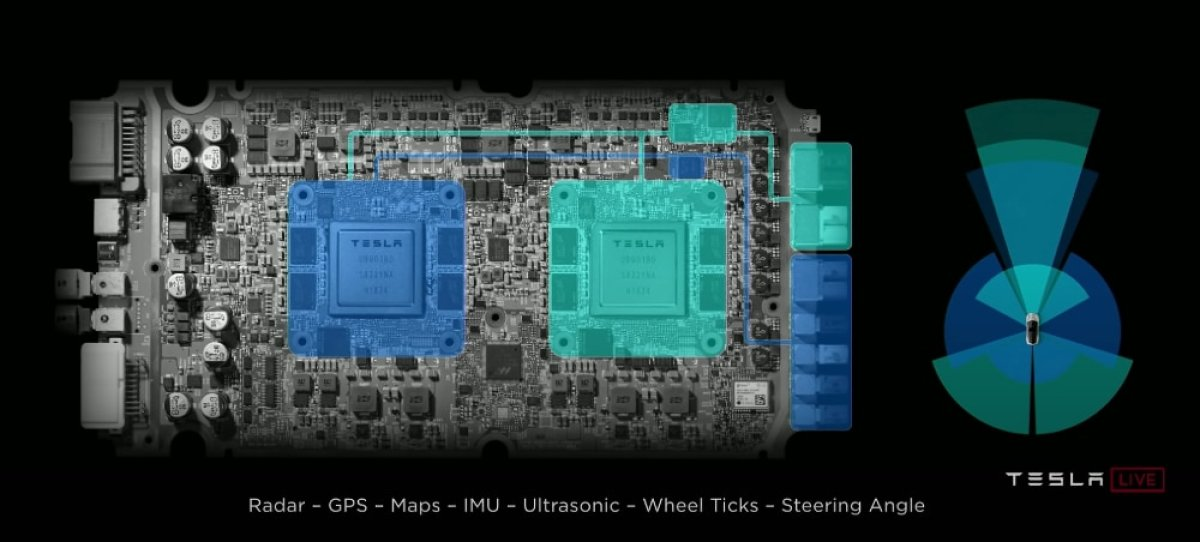
早在2016年初,特斯拉就啟動了全自動駕駛(FSD)計算機(也稱為硬件3,簡稱HW3)的研發工作,當時他們意識到市場上沒有其他好的解決方案。兩年后,也就是2018年末,FSD計算機正式投入生產。
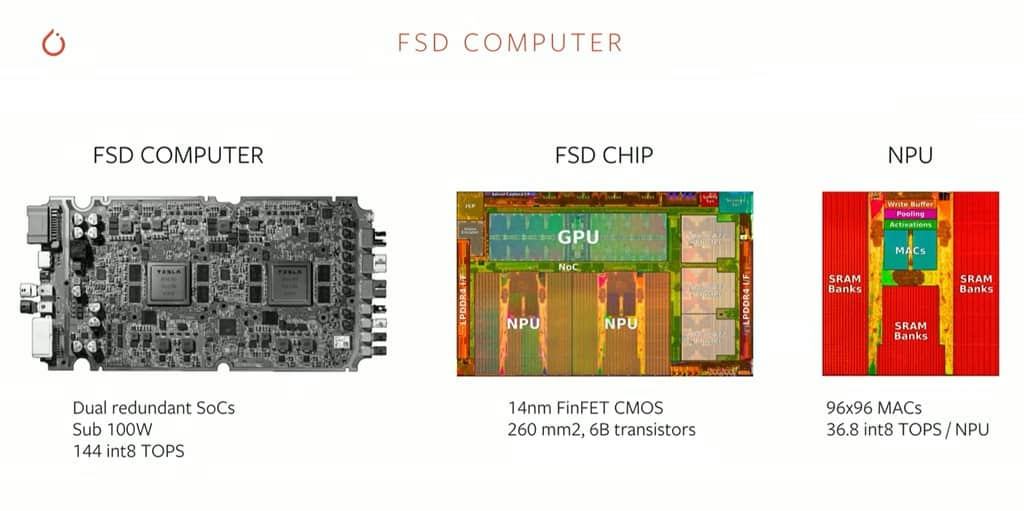
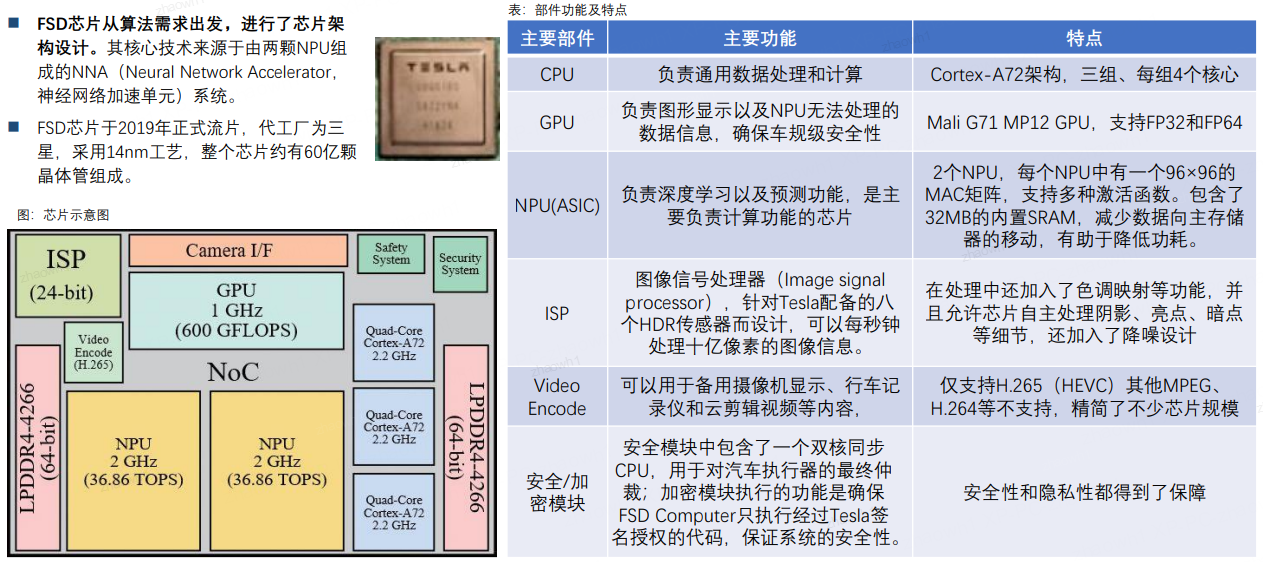
HW3.0 FSD采用三星 14 納米工藝制造,集成 3 個四核 Cortex-A72 集群,共計 12 個 CPU,主頻為 2.2 GHz。它還配備了一個定制設計的神經網絡加速器,可提供高達 36 TOPS(萬億次運算/秒)的性能。 HW3.0取代了自 2016 年底以來在特斯拉汽車上使用的 NVIDIA DRIVE PX 2 AI 計算平臺HW2.0(或 AP2)。HW3.0的性能明顯高于 NVIDIA 平臺,后者最高只能提供 21 TOPS 的性能。
特斯拉于2019年4月/5月左右開始在其所有車型上安裝HW3。新硬件使特斯拉能夠改進其FSD功能,例如自動駕駛導航、智能召喚、交通信號燈和停車標志控制以及FSD Beta測試版。新硬件還為顯示屏添加了更多可視化功能,例如交通信號燈、交通錐、垃圾桶以及道路上繪制的轉向箭頭。
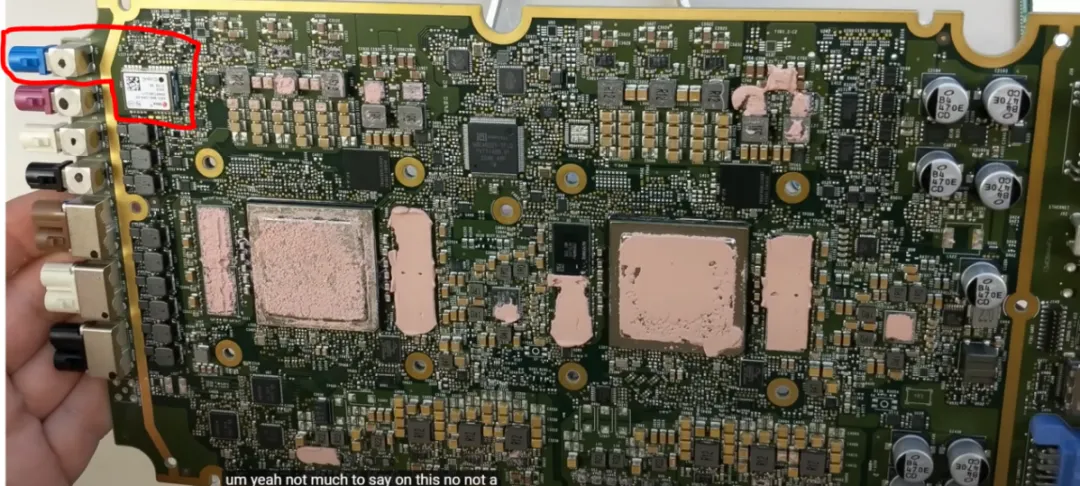
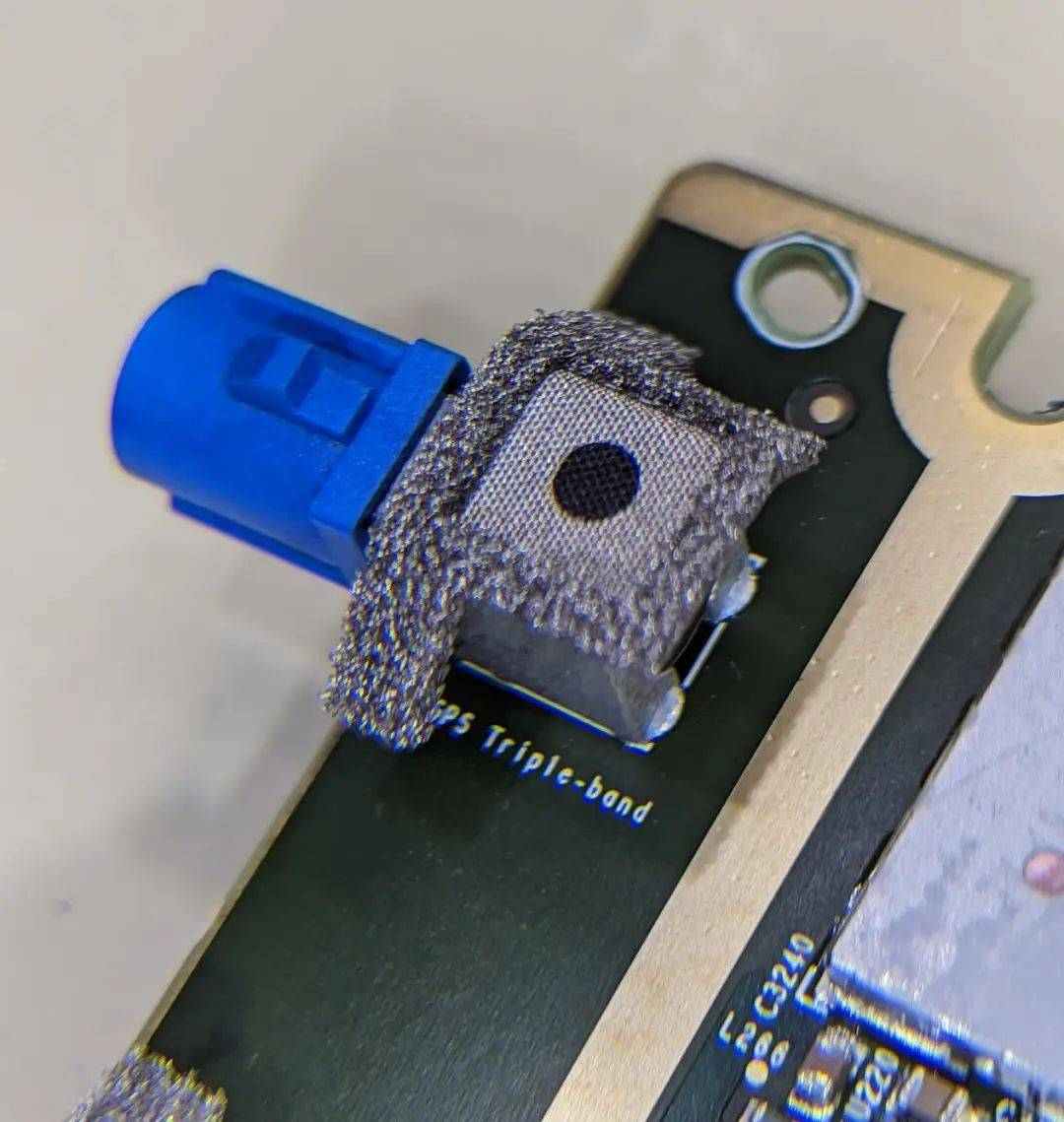
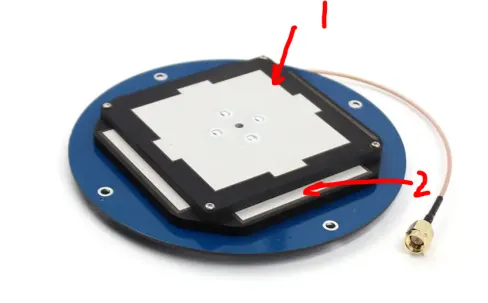
在HW3.0上,特斯拉使用了UBLOX生產的M8L,主要問題是僅支持單頻GNSS(GPS BEIDOU),容易丟失GNSS衛星信號。M8L在靜態、低速狀態下的定位精度在2m左右波動,屬于低端產品。 由于消費級GPS已經集成在LTE模塊中,在FSD上使用同樣低端的M8L顯得有些過時。從下圖可以看出,天線上只有一個貼片,因此只能支持一個頻段。

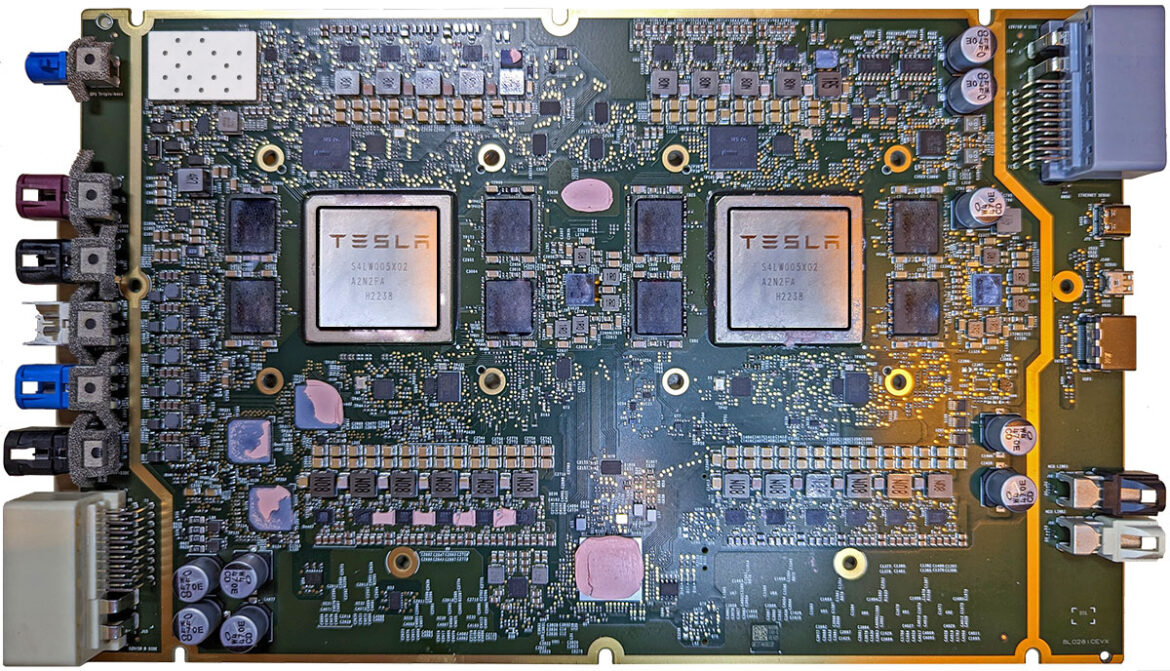
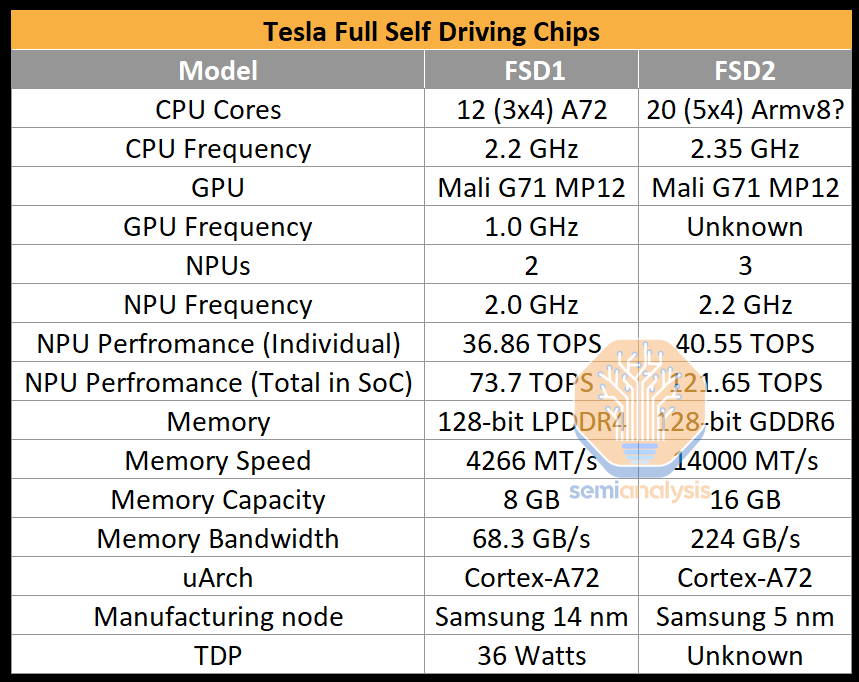
6、AP4 HW4.0 – FSD二代
HW4.0 – 是使用特斯拉第二代芯片設計的最新 Autopilot ECU 更新版本。據稱,它的神經網絡性能是 HW3 的三倍。它最初出現在 2023 年 3 月的 Model S/X 車型中,后來也應用于其他車型。由于尺寸、設計和連接器略有不同,因此不太可能作為 HW3 的升級版提供。
AI3 / HW3 (FSD Computer 1) | AI4 / HW4 (FSD Computer 2) |
|---|---|
Samsung Exynos-IP Based | Samsung Exynos-IP Based |
12 CPU Cores | 20 CPU Cores |
CPU Frequency: 2.2 Ghz | CPU Frequency: 2.35 Ghz |
2 Neural Network (NN) Processors | 3 Neural Network (NN) Processors |
NN Processor Frequency: 2.0 Ghz | NN Processor Frequency: 2.2 Ghz |
14 nm Process | Estimated TSMC’s 7nm or N4 (4nm class) |
36 TOPS | 50 TOPS |
1.2MP cameras around the car | 5MP cameras around the car |
Radar previously used was Continental’s ARS410 with a range of 160 meters. Discontinued in 2021. | TI 2243*2 6T8R and a 300 meter range. |
配套的AP4系統新硬件包括以下內容:
新型前置攝像頭,分辨率更高,視野更寬(某些型號,例如 Cybertruck)。
每個 B 柱上都裝有一個新的攝像頭,可以觀察側面和稍微向前的情況。
每個 C 柱上都裝有一個新的攝像頭,可以觀察側面和稍微向后的情況。
新型后置攝像頭,分辨率更高,視野更寬。
具有更高分辨率和更寬視野的新型客艙攝像機。
每個擋泥板上都安裝了一個新攝像頭,可以看到車輛后方的情況(有待確定,傳聞)
車輛兩側各安裝兩個新攝像頭,安裝位置比以前更低、更靠前(有待確定,傳聞)
預計新雷達將被稱為“鳳凰”,其精度將高于之前的雷達。
新硬件最多可添加 12 個攝像頭,而 HW3 中只有 9 個攝像頭。電路板上的一個攝像頭連接器標有“備用”,這表明特斯拉未來可能會添加另一個攝像頭。

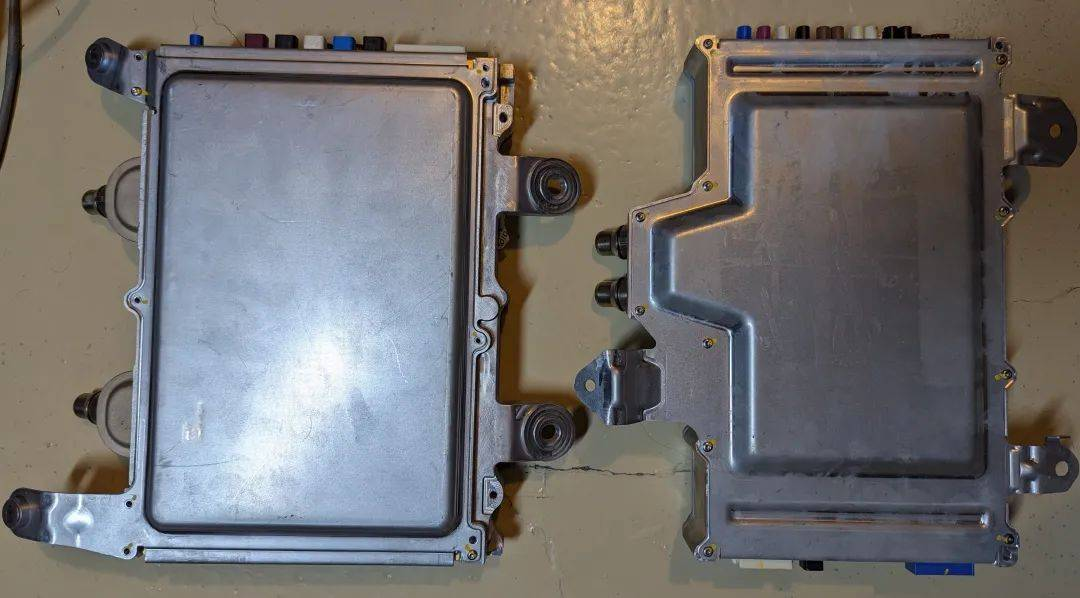

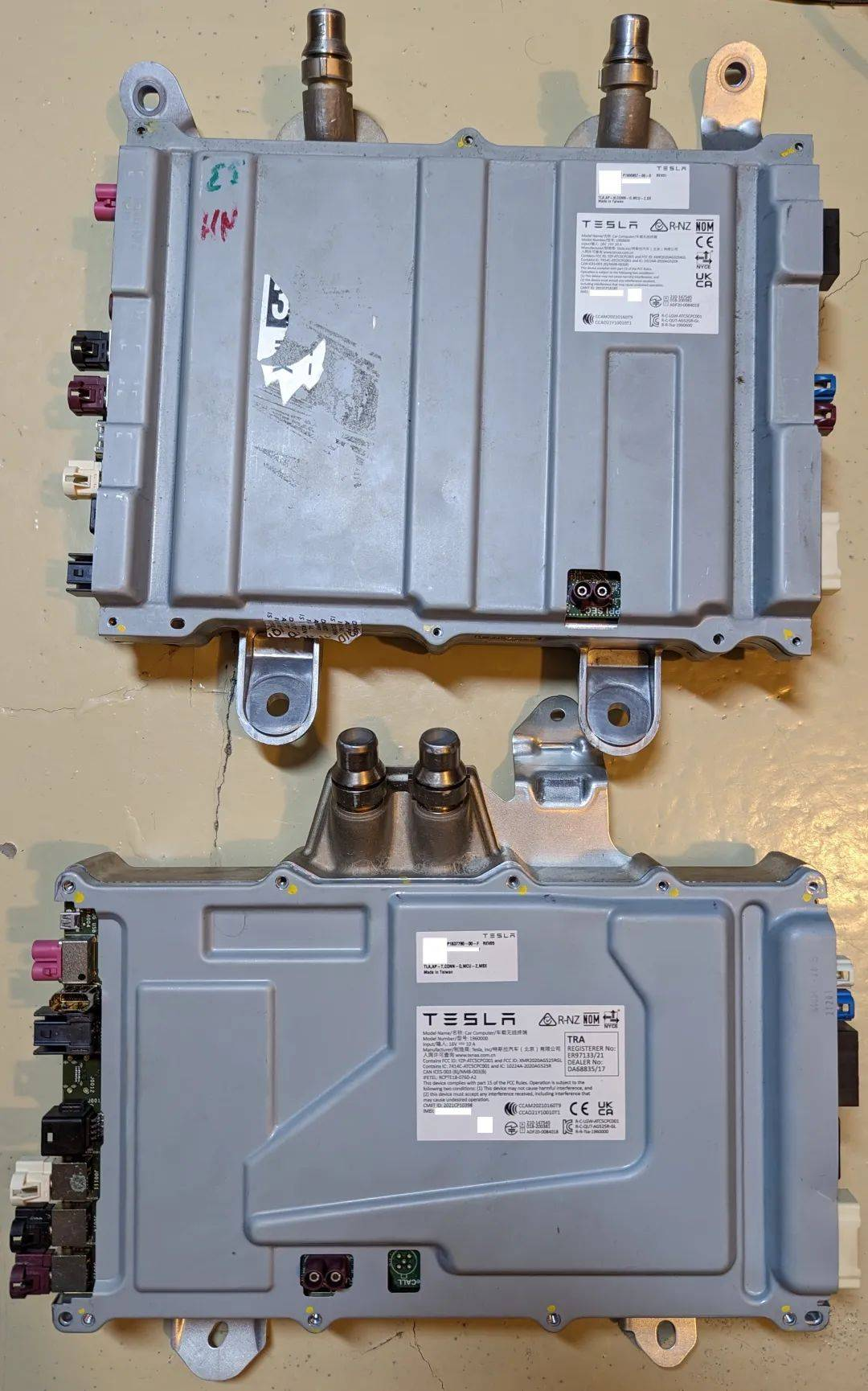
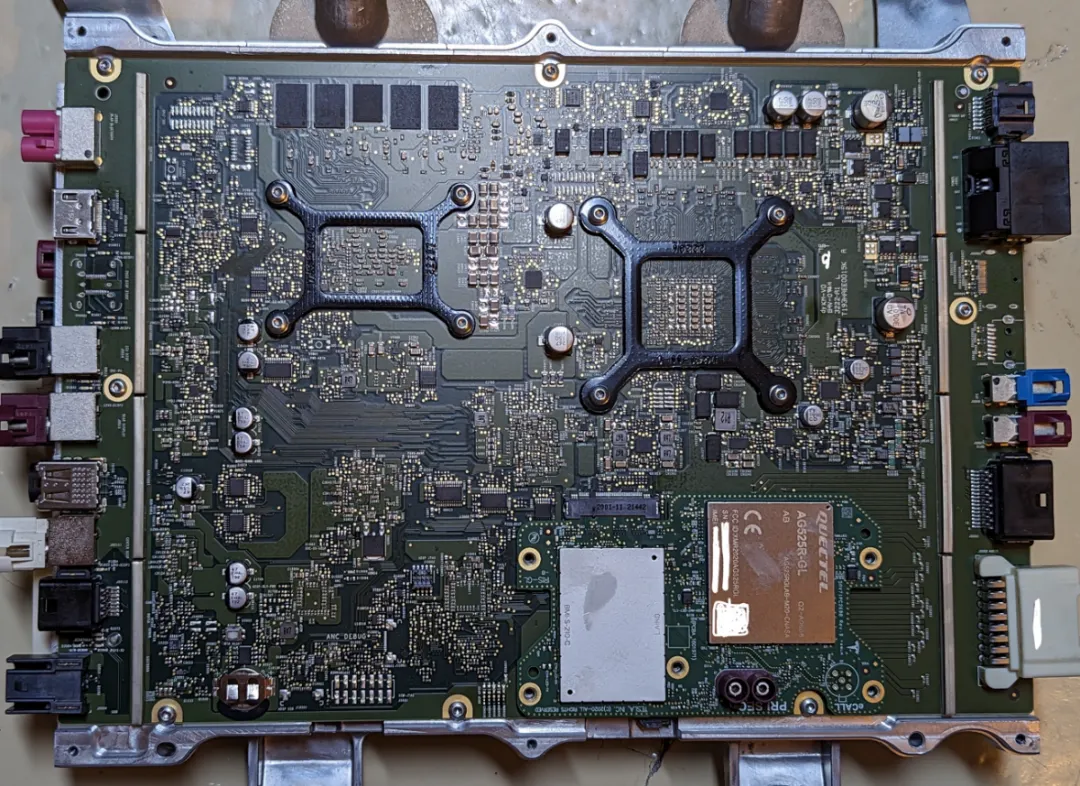
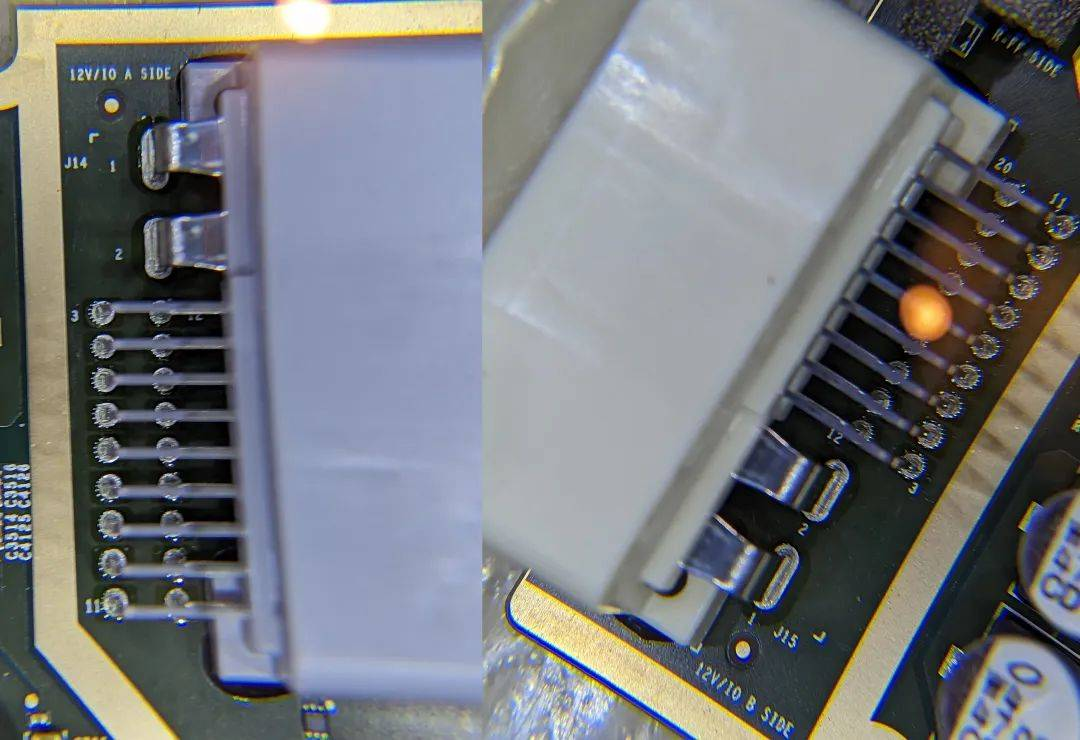
全新的 FSD 芯片屬于改良而非重新構建,畢竟 Jim Keller 大神也離職了,芯片依然基于三星的 Exynos 架構,但是 CPU 核心從之前的 12 個增加到了 20 個,最高頻率 2.35GHz,低功耗頻率 1.37GHz,TRIP 內核數量從 2 個增加到 3 個,最高頻率 2.2GHz。 全新全自動駕駛計算機(FSD Computer 2)預計將比硬件 3 快 2 到 4 倍,處理能力顯著提升。它同樣基于與前代相同的三星 Exynos 架構,但此次迭代的性能更勝一籌,每側 CPU 核心數量從 12 個增加到 20 個,每個核心的最高頻率為 2.35 GHz,空閑速度為 1.37 GHz。神經網絡加速器也得到了改進,性能高達 50 TOPS,而 HW3 僅為 36 TOPS。 同之前的 HW3.0 一樣,每輛車也提供了兩塊 FSD 芯片,提供雙重算力的時候也可以做到冗余,使得整個 PCB 看起來也呈現對稱的狀態,兩側的電源接口相同,也具備兩個 MCU 的連接模塊,但目前來看,HW4.0 還不能做到真正意義上的完全冗余,如果一側電源失效,依然會讓整個系統的數據連接出現問題。

GNSS小幅升級
HW4.0的天線接口和芯片位置基本保持不變,但芯片封裝從近似正方形變成了1:2的矩形。根據之前的報道,HW4.0的GNSS天線也發生了變化,因此推測特斯拉更換了GNSS芯片供應商。
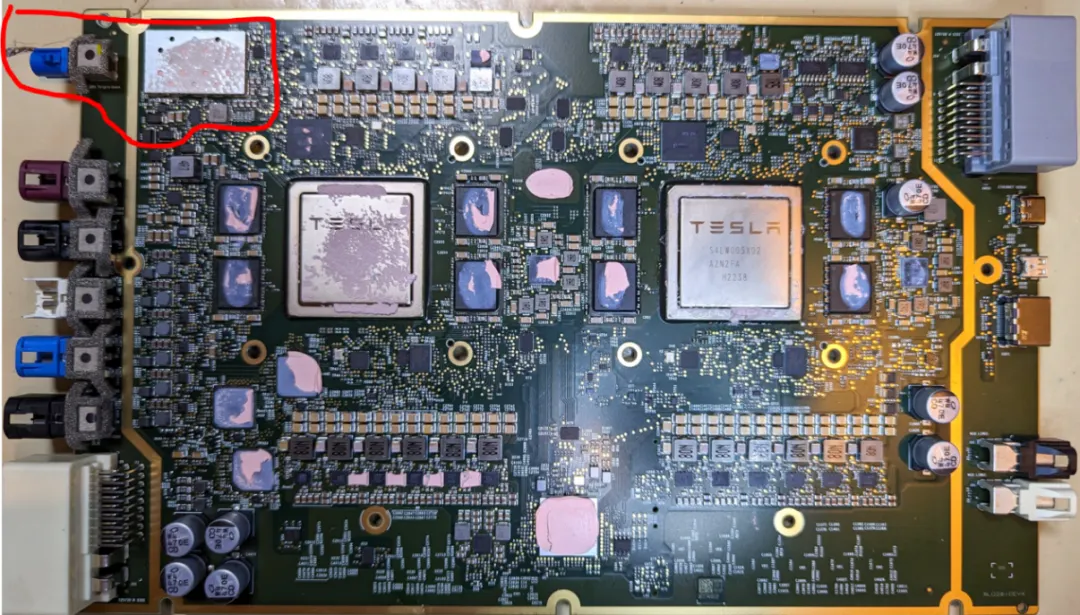
GNSS 模塊也得到更新,擁有更強性能的三頻天線,之前歐洲的申報文檔中就曾說明,這個新的模塊會讓其他國家標準的全球定位系統也得到受益。
市面上符合車規的GNSS芯片并不多。目前UBLOX F9P在國內新勢力中應用較為廣泛,性能與測繪RTK接收機相差無幾。但主要問題在于價格過高(散片1574.09元)。或許用價格更低的M9 F9h的可能性更大,但是有一點疑點就是包裝上沒有UBLOX的標志。

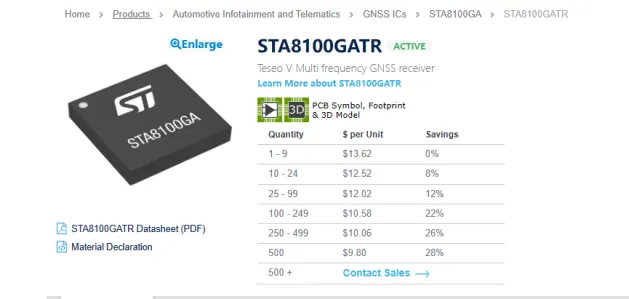
國內另一個主流方案是ST 8100 9100。這款芯片性能未知,但也通過了AECQ100車規認證,支持L1 L5雙頻甚至L2 E6,信號質量和衛星捕獲能力遠勝M8L。相對而言,ST的價格有一定優勢,Demo板上的封裝也是矩形的。特斯拉也可能跟隨國內GNSS供應商(如中國移動、中測)采用ST方案。

但單獨使用ST是無法實現RTK的,需要做成模塊,再加RTK算法。Mobile有基于ST 8100的RTK方案。 第三種可能性是方案比較少,比如SWIFT、華大北斗也有類似的高精度定位方案,這種可能性也是存在的。 值得注意的是,雙天線配置至少有兩個優點:一是可以在低速下獲取高精度航向信息,避免機載導航和IMU的初始化;其次,主從天線互為備份,大大增加了系統的魯棒性,更容易滿足上述ASIL-B的要求。 無論HW4.0具體采用哪款芯片,都可以清晰地看出特斯拉已經徹底放棄了單頻單點定位的低端方案,轉向了多系統多頻方案。不過,是否采用PPP RTK技術,從外觀上來看,希望不大。 對于高精度定位市場,目前國內市場UBLOX和ST占據半壁江山,但UBLOX在海外市場占據絕對優勢。
雷達:自研6T8R的4D雷達
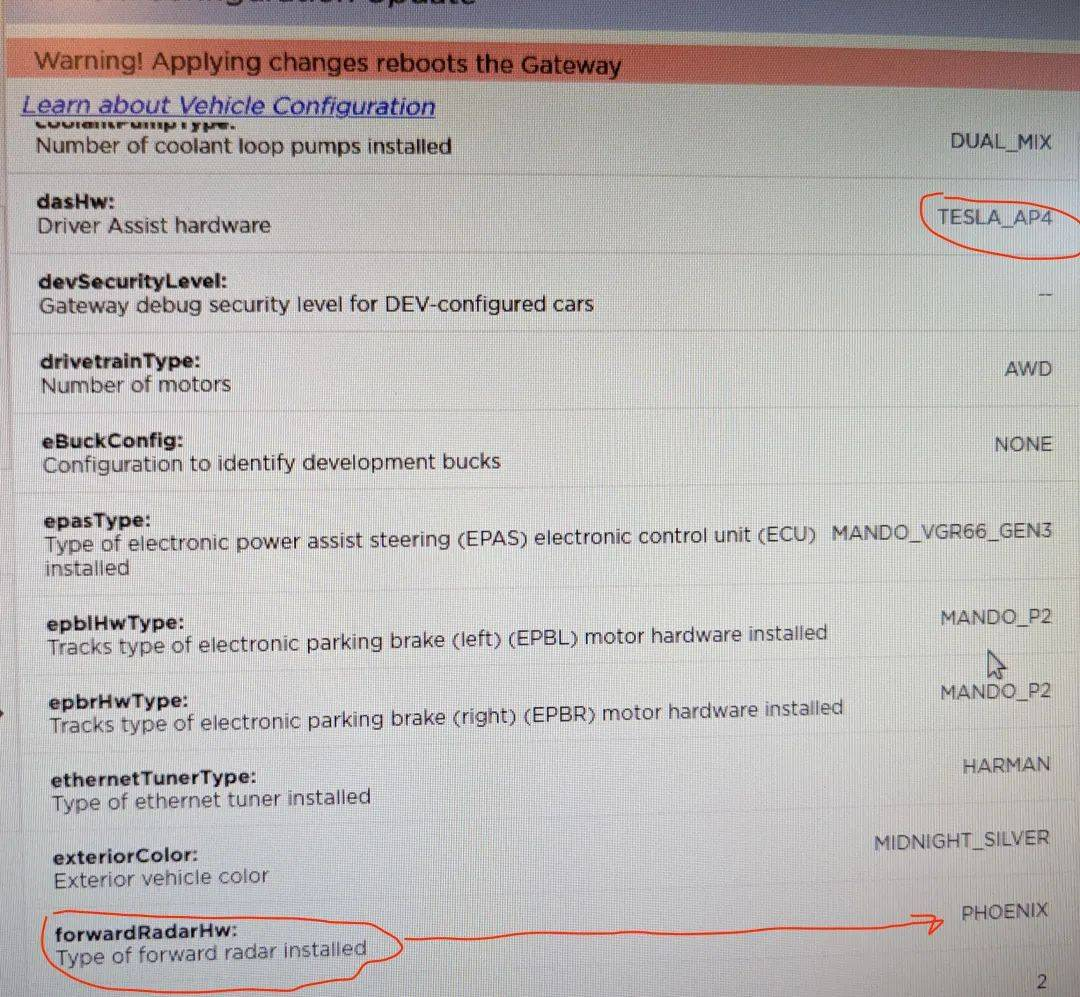
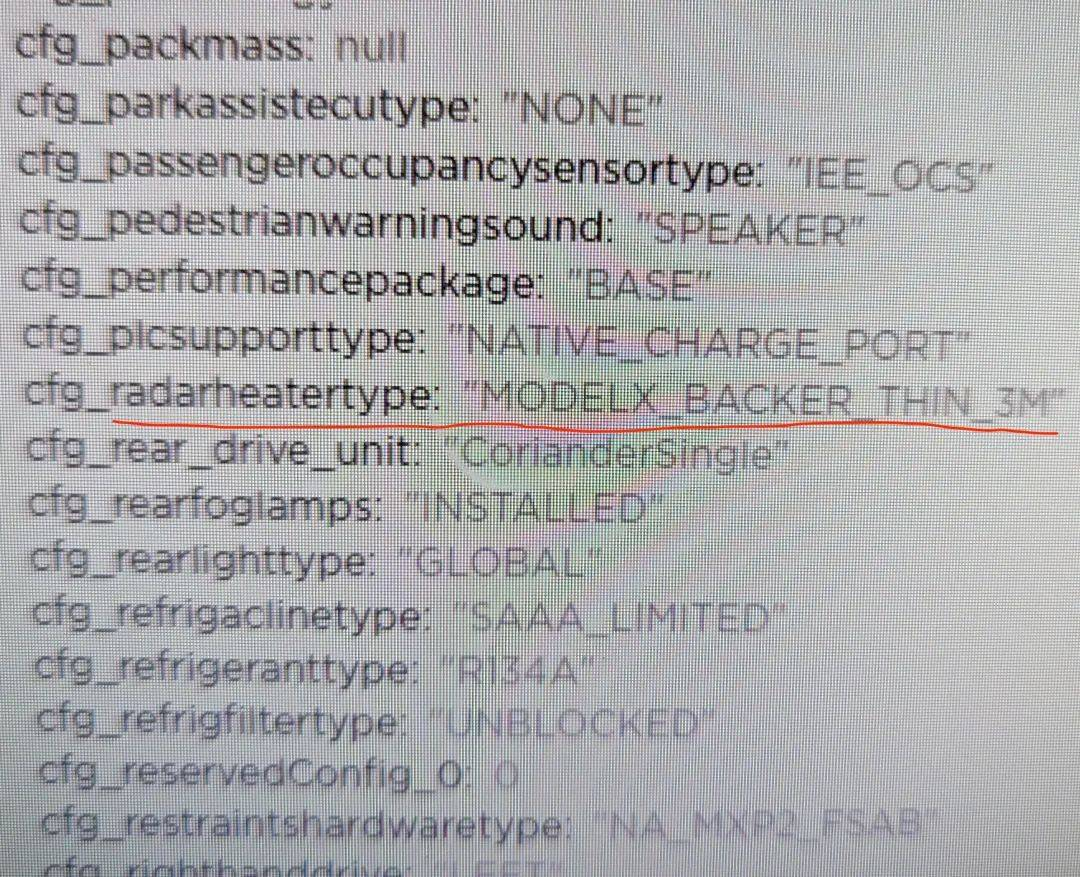
在特斯拉于 2021 年轉向純視覺系統后,HW4.0 加回了雷達(一款名為 Phoenix 的高清雷達),代號 Phoenix(鳳凰)的雷達還擁有自己的加熱器,保證了更好的全天候性能。
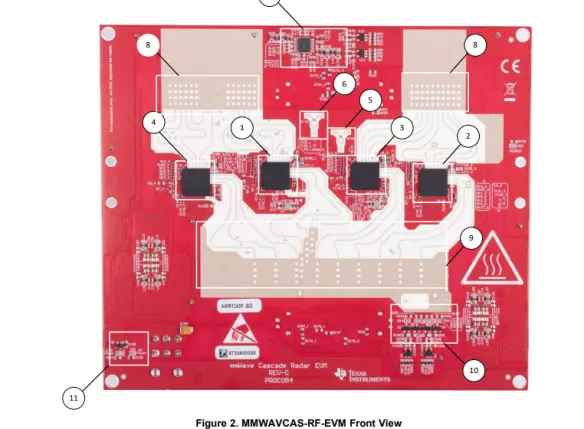
此次將HW4.0重新搭載到毫米波雷達上,被業界廣泛譽為新一代4D毫米波。根據照片來看,該方案初步分析應該是六發射八接收的級聯方案,采用MIMO雷達體制。TI的2243雙級聯方案。
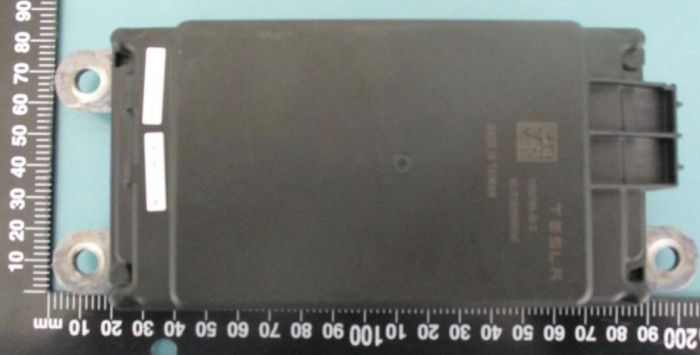
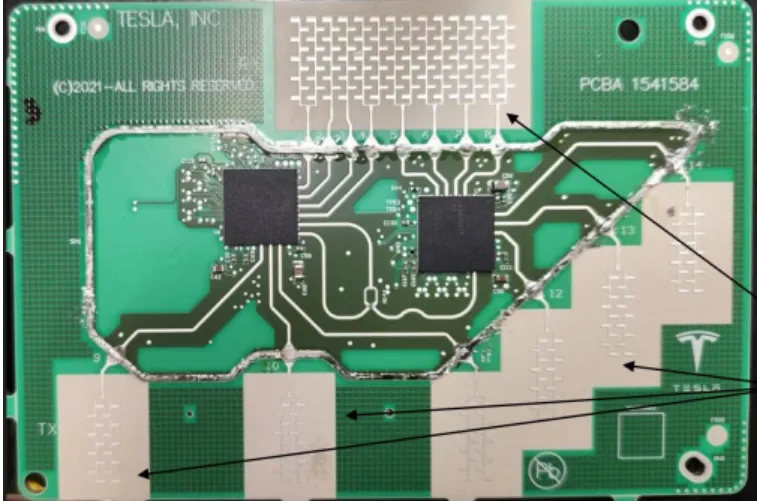
值得注意的是,該雷達的信號處理芯片為Xilinx 7020系列,茂澤的報價為每片1275元,這大大增加了整套毫米波雷達的成本。筆者對此頗感意外,畢竟TI的方案是內嵌DSP的。而據茂澤介紹,7020內嵌了ARM和FPGA,可以作為傳感融合芯片使用,FPGA的實時性是一大優勢。據官網介紹,7020可用于環境意識和整合 所以這款雷達后處理潛力很大。 到目前為止,似乎只有 Model S 和 Model X 車輛配備了新的雷達裝置:

通信模塊
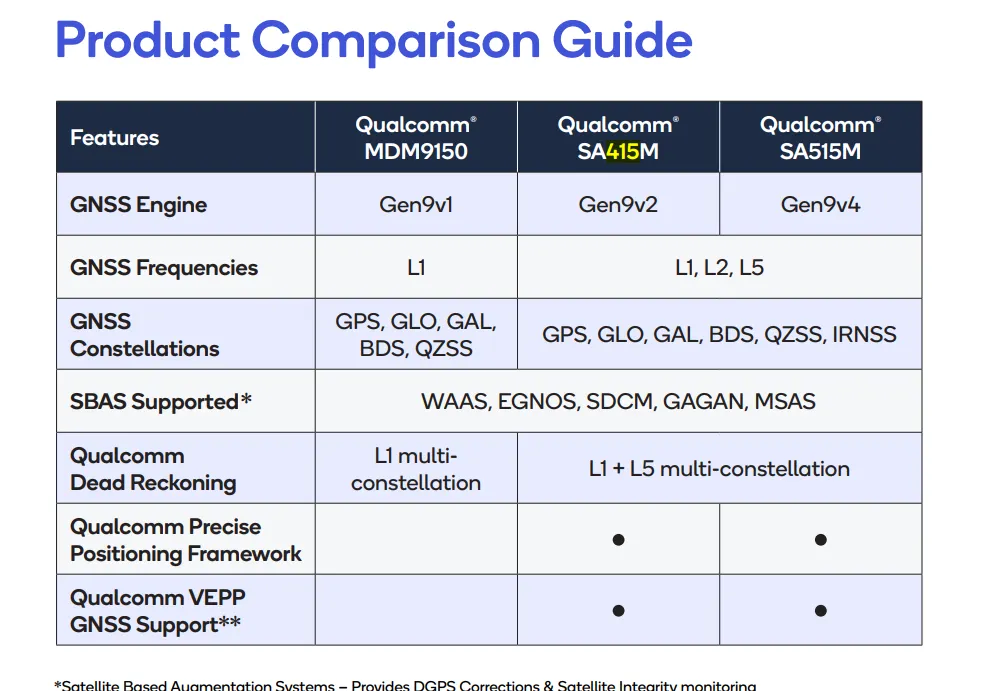
通訊模塊依然是SA415,由于高通SDX55價格過高,特斯拉目前還不愿意把通訊模塊升級到5G。SA415還搭載了另一套GNSS定位系統(VEPP)。
自駕攝像頭
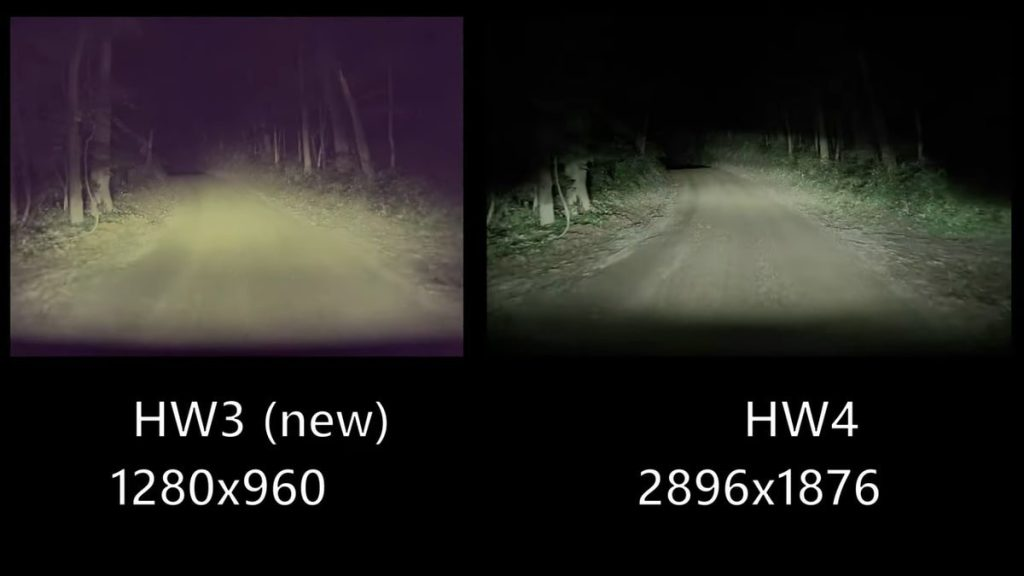
HW4.0 Camera的信息目前還比較少,維基百科的信息是自駕相關的Camera 均為5MP,但是沒有顯示引用信息來源;另外還有一種說法除Front Camera為5MP外,其他均為1.36MP。 僅僅為猜測,需要相關信息確認:通過網上的HW4.0 VS HW3.0的Camera效果對比看,個人感覺HW4.0選擇全系5MP Camera的可能性更高,CIS統一采用Sony IMX490,延續Tesla一貫的系統化最優設計風格,所有Camera統一5MP設計(增加CIS議價權,減少Camera PCBA的設計維護數量),后續搭配不同的鏡頭得到不同應用的Camera。Tesla走的是CIS盡量統一化路線,即使無法完全統一,也是品類最少化。 新的攝像頭還將提供更好的圖像質量,并將有利于哨兵模式等非FSD功能。 然而,新相機分辨率的提高只是即將發生的相機變化的一小部分。攝像頭數量從接口上看增加到了12個。
具體如下,Camera(RGGB)*11,CIS統一化為5MP:
前視*2(Sony IMX490)(5.43MP);
側前視*2(5.43MP);
側后視*2(5.43MP);
后視*1(5.43MP);
環視*3(Rear Corner Camera*2+Front Bump Camera*1)(5.43MP)

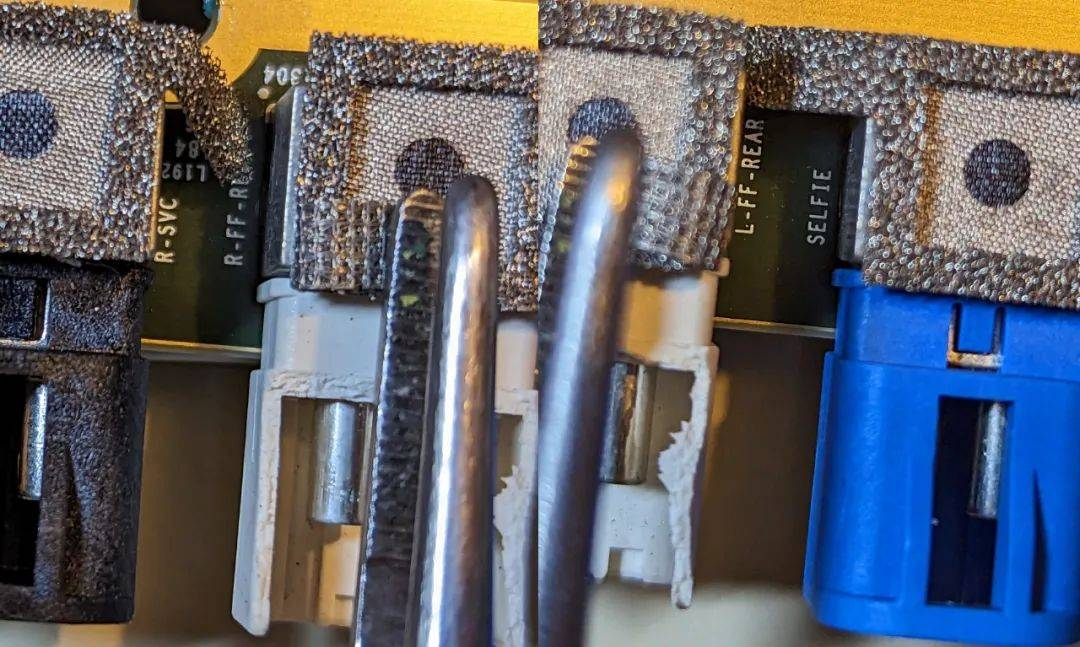
每個插口上都標記了攝像頭的連接位置,比如 F-SVC、L-SVC、R-SVC、L-FF-Rear、R-FF-Rear 等。

特斯拉HW4.0 搭載12 個攝像頭連接器,其中一個標記為備用。目前所有特斯拉汽車共配備 9 個攝像頭。其中三個是前向攝像頭,位于擋風玻璃下方,兩個位于擋泥板上,兩個位于 B 柱上,一個位于后部,一個用于座艙攝像頭。 可以確定的是,前擋風玻璃上有兩個攝像頭,這也在之前實車的照片中被拍到,而車廂內依然有一個攝像頭。 升級后的攝像頭以其獨特的紅色調為標志,能夠提供車輛周圍環境的全面視野。此外,前置擋風玻璃攝像頭還配備了加熱元件,以確保在各種天氣條件下都能保持最佳運行。

其中有兩個活動攝像頭,顏色為紅色,還有一個假攝像頭(該插槽中已不再使用),如下所示:

新款相機的分辨率更高,細節更清晰。AI4 的后置攝像頭分辨率為 1448×938,而硬件 3 的分辨率為1280×960。 前置攝像頭的差異更大。HW4/AI4 的分辨率為 2896×1876,而 HW3 的分辨率為 1280×960。 此外,它們所具有的明顯的紅色色調確保了在低光照條件下更好的性能。 HW4/AI4 的攝像頭帶有紅色鏡頭 – 最容易看到的地方是前置攝像頭 – 那里有 2 個紅色鏡頭和一個黑色(假)鏡頭。 AI4 取消了第三個前置攝像頭,因為攝像頭現在具有更高的分辨率。 側攝像頭也略有不同,具有相同的紅色色調,但轉向指示燈更小更窄。
L-FF-Rear 和 R-FF-Rear 兩個攝像頭應該是會出現在前翼子板的位置。


特斯拉 CyberTruck 上也配備了前保險杠攝像頭,有傳言稱其他車型也可能配備該攝像頭。事實上,有人在特斯拉網站上看到了新款 Highland Model 3 前保險杠攝像頭的圖片,但這些攝像頭后來被移除了。

處理能力
HW4.0 的速度將比HW3.0快 2 到 4 倍。毫無疑問,部分性能將用于處理新的攝像頭信號以及新攝像頭提供的額外像素。然而,鑒于硬件 3.0 的處理能力已接近極限,額外的性能至關重要。 新硬件芯片的規格,其核心數量將從 12 個增加到 20 個,最高主頻可達 2.35 GHz。此外,TRIP 核心數量也從 2 個增加到 3 個,最高主頻可達 2.2 GHz。 馬斯克之前曾表示,HW4 比硬件 3 快 3-5 倍,盡管目前尚未充分利用所有計算能力。 目前尚不清楚硬件 4.0 相比硬件 3 的速度會快多少,但聽起來改進可能接近我們預期的 2-4 倍速度提升的下限。 提供的硬件規格是每個節點的,主板有兩個節點,預計用于冗余。
特斯拉推出HW3.0 時,也考慮到了緊急情況下的冗余。每個電路板都包含兩個相同的節點。兩個節點可以計算相同的數據并比較輸出,從而讓車輛知道是否存在問題。即使一個節點發生故障,車輛也能繼續自動駕駛足夠長的時間,以便安全靠邊停車。 然而,隨著特斯拉處理需求的增加,HW3.0 上的冗余被消除,以便特斯拉可以利用兩個節點的處理能力。 通過HW4.0,特斯拉再次在其硬件中增加了冗余,不僅在芯片和處理方面,而且在電源冗余方面。 電源
隨著性能水漲船高的,是功耗,綠神表示 HW4.0 的功耗大約是 HW3.0 的 兩倍,甚至加入了更強的電源支持。
Ref:https://www.autopilotreview.com/tesla-hardware-4-rolling-out-to-new-vehicles/ (有表格)
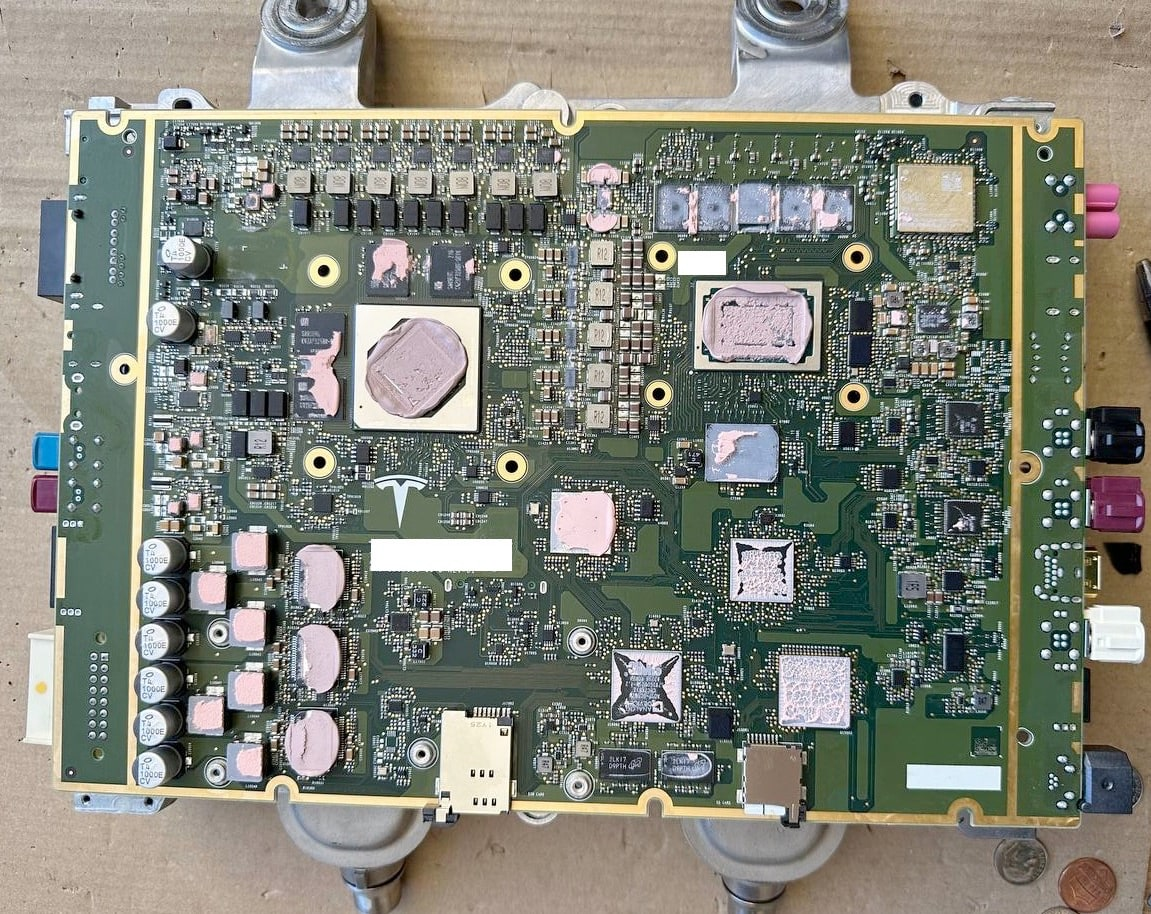
當前硬件 4 實現
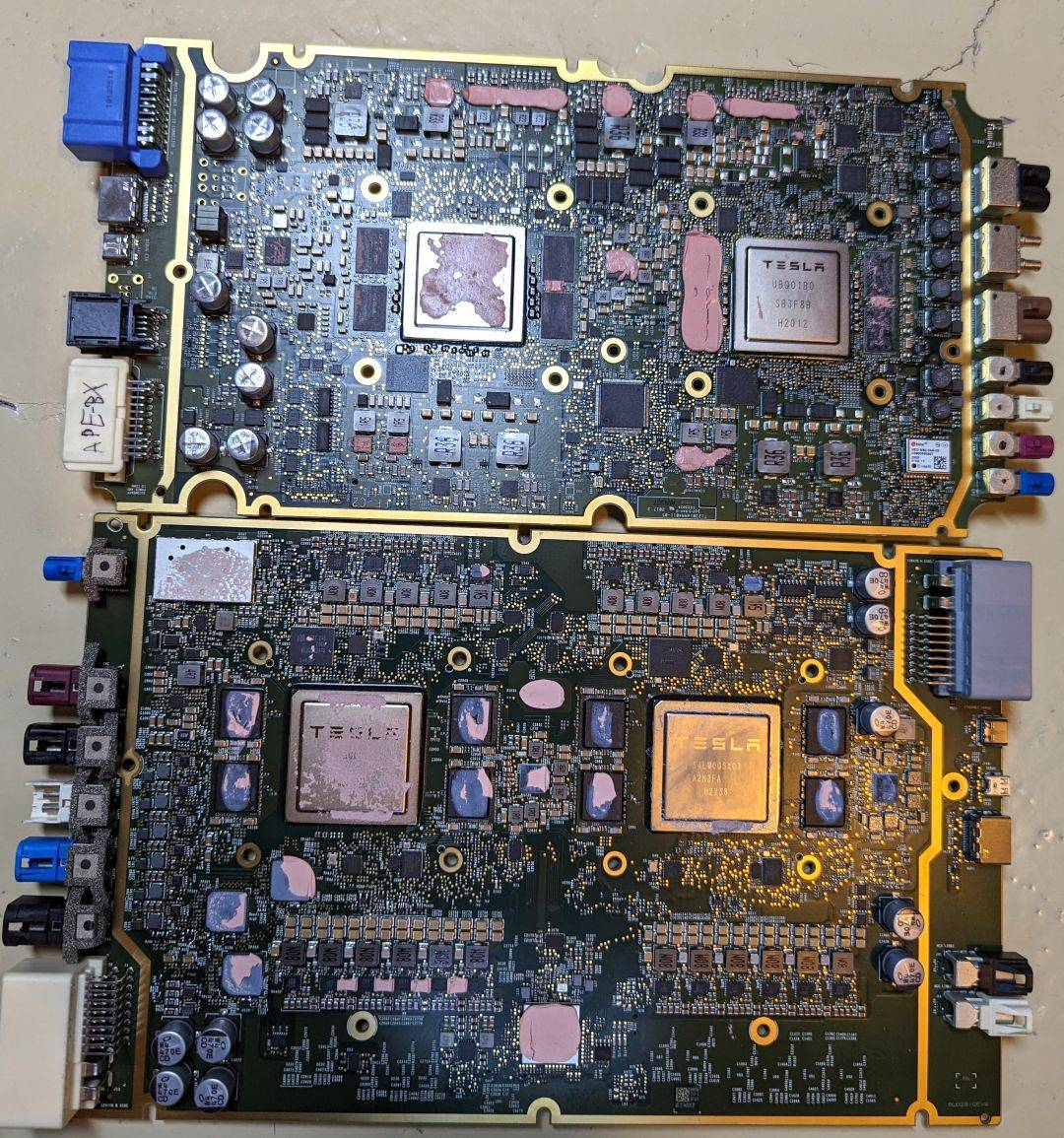
在對 Model Y Hardware 4 單元進行拆解時, Model S 和 X 上的 Hardware 4 相比存在以下差異:
HW4 的物理結構與 S/X 型號相似,這打破了有關 HW3 汽車可能進行改裝的任何猜測。
HW4 的電路板布局與 Model S 上的 HW4 類似,但某些組件(包括 GPU 和高級音頻硬件)現在缺失或減少了。這似乎是特斯拉為了降低成本而采取的措施。
HW4 在信息娛樂系統方面使用了更便宜的非糾錯碼 RAM (ECC RAM)。它還增加了兩個顯示接口,但數量較少,這暗示車輛可能配備第二個顯示屏。
HW4 的其他顯著特征包括重新定位的 BroadR-Reach 以太網,以及新增的第三個非密集型以太網。網關芯片也進行了更改,目前使用的是來自其他供應商的不同型號。
將 HW3 汽車改裝為 HW4 汽車并非像看起來那么簡單,因為需要進行修改以適應新的冷卻液管道位置。這可能會使改裝成本比簡單地制造一塊舊款尺寸的新電路板更高。
德克薩斯州生產的 Model Y 配備了塑料“防火墻”,因此需要更改新款 HW4 的安裝方式。盡管內部組件保持不變,但不同的安裝方式導致電腦需要使用唯一的零件編號。
Model Y 的攝像頭連接器數量有所減少,這也導致了 HW4 的諸多差異。缺失的攝像頭連接器原本用于連接其他攝像頭,例如前保險杠攝像頭。然而,缺少連接器并不意味著特斯拉未來不會添加它們。
Ref:https://www.hstong.com/news/detail/22012608180858664
Ref:https://www.notateslaapp.com/news/2655/teslas-fsd-v13-pushes-hw4-hardware-capabilities-end-of-line-for-hw3
Ref:https://www.ark-invest.com/articles/analyst-research/tesla-fsd
Ref:https://semianalysis.com/2023/06/27/tesla-ai-capacity-expansion-h100/
)


)












)

)
:鎖問題排查全攻略——揪出“阻塞元兇”)