Mujoco(MuJoCo,全稱Multi - Joint dynamics with Contact)是一種高性能的物理引擎,主要用于模擬多體動力學系統,廣泛應用于機器人仿真、運動學研究、人工智能等領域。以下是關于Mujoco仿真的一些詳細介紹:
1. 基本原理
- 多體動力學 :Mujoco基于多體動力學理論,能夠精確地模擬多個剛體之間的運動和相互作用。它通過牛頓 - 歐拉方程來描述每個剛體的運動狀態,包括位置、速度、加速度等,并考慮了剛體之間的約束關系,如關節連接、接觸碰撞等。
- 碰撞檢測與處理 :Mujoco具備高效的碰撞檢測算法,能夠實時檢測物體之間的碰撞,并根據物理定律計算碰撞后的運動狀態。它支持多種碰撞模型,如彈性碰撞、非彈性碰撞等,可以根據實際需求進行選擇和調整。
- 數值積分方法 :為了求解動力學方程,Mujoco采用了數值積分方法。常用的積分方法有歐拉法、龍格 - 庫塔法等。這些方法通過離散化時間步長,逐步計算系統在每個時間點的狀態,從而實現對連續運動過程的模擬。
2. 主要功能
- 模型構建 :Mujoco支持用戶通過XML文件定義仿真模型,包括剛體的形狀、尺寸、質量、慣性張量等屬性,以及關節的類型、位置、限制等信息。用戶可以構建復雜的機器人模型、機械裝置模型等。
- 傳感器仿真 :Mujoco提供了多種傳感器的仿真功能,如位置傳感器、速度傳感器、力傳感器等。這些傳感器可以實時獲取仿真模型的狀態信息,為控制算法提供反饋。
- 控制器接口 :Mujoco提供了與外部控制器的接口,用戶可以編寫自己的控制算法,并將其與仿真模型進行連接。通過控制器接口,用戶可以實現對仿真模型的精確控制,如關節位置控制、力矩控制等。
- 可視化功能 :Mujoco具備強大的可視化功能,能夠實時顯示仿真模型的運動過程。用戶可以通過調整視圖角度、縮放比例等操作,清晰地觀察模型的運動狀態。此外,Mujoco還支持將仿真結果保存為視頻文件,方便后續分析和展示。
3. 應用場景
- 機器人仿真 :Mujoco在機器人仿真領域得到了廣泛應用,如機器人的運動規劃、路徑規劃、抓取操作等。通過仿真,可以在虛擬環境中對機器人進行測試和優化,減少實際機器人實驗的成本和風險。
- 運動學研究 :在運動學研究中,Mujoco可以用于模擬生物體的運動,如人體運動、動物運動等。通過對生物體運動的仿真,可以深入研究其運動機制和力學特性,為運動學理論的發展提供支持。
- 人工智能訓練 :Mujoco被廣泛應用于人工智能領域的強化學習訓練。通過構建虛擬環境和仿真模型,為智能體提供訓練場景,使其能夠在虛擬環境中學習和優化策略,從而提高智能體的性能和適應性。
4. 優勢與局限性
-
優勢
- 高效性 :Mujoco采用了先進的算法和優化技術,能夠快速地進行動力學計算和碰撞檢測,保證了仿真的實時性和高效性。
- 精確性 :基于嚴格的物理定律和動力學模型,Mujoco能夠精確地模擬多體系統的運動和相互作用,為科學研究和工程應用提供了可靠的仿真結果。
- 靈活性 :用戶可以通過XML文件靈活地定義仿真模型和參數,支持多種傳感器和控制器接口,能夠滿足不同用戶的需求。
-
局限性
- 僅支持剛體動力學 :Mujoco主要專注于剛體動力學的模擬,對于軟體物體、流體等的模擬能力較弱。如果需要模擬這些復雜的物理現象,可能需要結合其他專門的仿真工具。
- 學習曲線較陡 :Mujoco的使用需要一定的物理和數學基礎,用戶需要熟悉多體動力學理論和數值計算方法。此外,其XML模型定義方式也相對復雜,需要一定的學習時間來掌握。
5. 使用示例
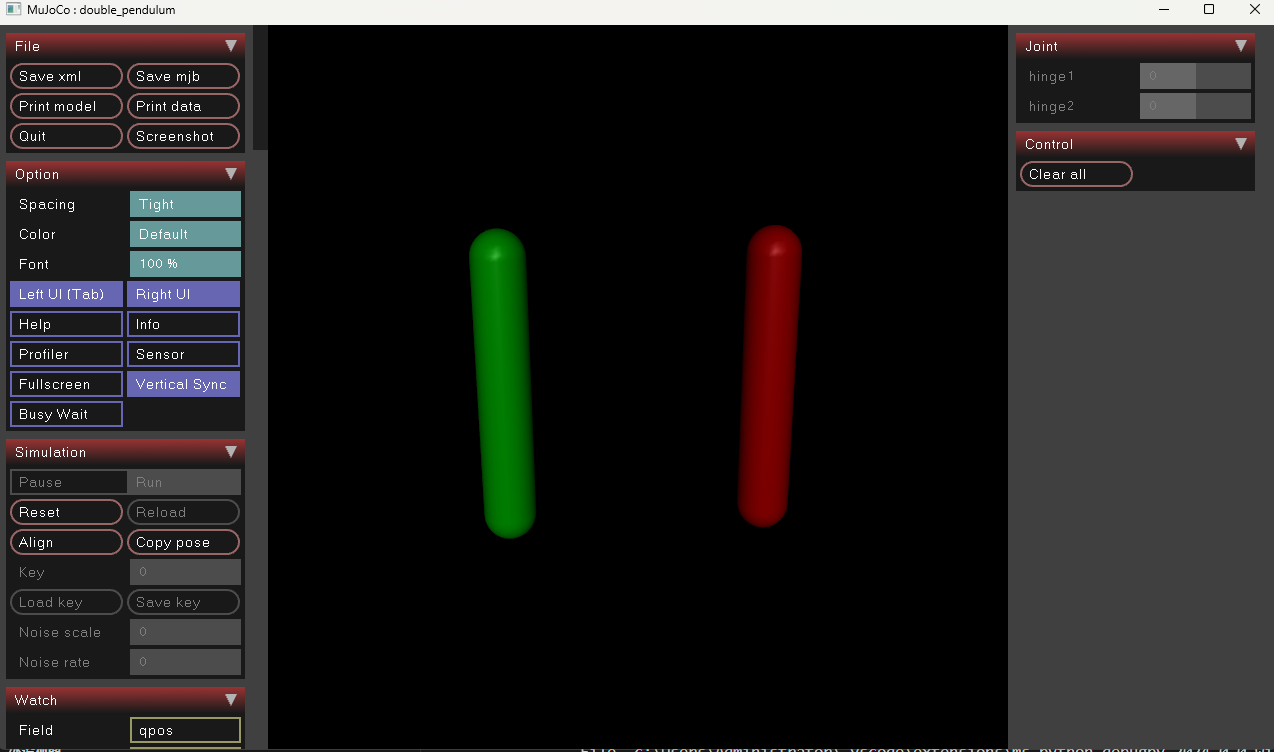
以下是一個簡單的Mujoco仿真示例,展示如何創建一個簡單的雙關節機器人模型并進行仿真。
- 模型定義(XML文件) :
<mujoco model="double_pendulum"><compiler angle="degree"/><option integrator="RK4" timestep="0.002"/><worldbody><body name="link1" pos="0 0 0"><geom type="capsule" size="0.05 0.25" rgba="1 0 0 1"/><joint name="hinge1" type="hinge" pos="0 0 0" axis="0 0 1"/><body name="link2" pos="0 0.5 0"><geom type="capsule" size="0.05 0.25" rgba="0 1 0 1"/><joint name="hinge2" type="hinge" pos="0 0 0" axis="0 0 1"/></body></body></worldbody>
</mujoco>
- 仿真代碼(Python) :
import mujoco
import mujoco.viewermodel = mujoco.MjModel.from_xml_path("double_pendulum.xml")
data = mujoco.MjData(model)with mujoco.viewer.launch_passive(model, data) as viewer:while viewer.is_running():mujoco.mj_step(model, data)viewer.sync()
在這個示例中,我們定義了一個雙關節機器人模型,包含兩個關節和兩個連桿。通過Mujoco的Python接口,我們加載模型并啟動仿真,實時顯示機器人的運動過程。
Mujoco仿真是一種強大的工具,能夠為機器人、運動學和人工智能等領域提供高效的仿真支持。通過合理利用其功能和優勢,可以有效地提高研究和開發的效率和質量。
)





)












)