對于目前深度學習主流任務學習,loss的設置至關重要。下面就不同任務的loss設置進行如下總結:
(1)目標檢測
2D/3D目標檢測中的 Loss(損失函數)是訓練模型時優化目標的核心,通常包括位置、類別、尺寸、方向等多個方面。以下是目前 常見的 2D 和 3D 目標檢測 Loss 分類與總結:
?? 一、2D 目標檢測常見 Loss
2D 目標檢測常見于圖像(如 COCO、VOC),其 Loss 主要分為以下三類:
1. 分類損失(Classification Loss)
-
Cross Entropy Loss:最常用,如 Faster R-CNN、YOLOv3。
-
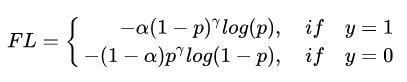
Focal Loss:用于處理前景/背景不均衡,如 RetinaNet。
2. 邊界框回歸損失(Bounding Box Regression Loss)
-
Smooth L1 Loss / Huber Loss:常用于 R-CNN 系列。
-
IoU Loss:直接優化 IoU,穩定性更好。
-
GIoU / DIoU / CIoU Loss(用于 YOLOv4/v5 等):
-
GIoU: Generalized IoU,考慮重疊與包圍。
-
DIoU: Distance IoU,考慮中心距離。
-
CIoU: Complete IoU,綜合中心、面積和長寬比。
-
3. 輔助任務損失
-
Objectness Loss:YOLO 系列判斷該區域是否有目標。
-
Center-ness Loss:FCOS 中判斷中心點可信度。
-
Heatmap Loss(如 CornerNet, CenterNet):
-
用高斯熱圖回歸目標中心點,常用 MSE 或 focal loss。
-
?? 二、3D 目標檢測常見 Loss
3D 檢測用于點云(如 KITTI、nuScenes、Waymo),損失函數更加復雜,涵蓋了空間維度、方向等:
1. 分類損失
-
同 2D 檢測,使用 CrossEntropy/Focal Loss。
-
在 anchor-based 方法中用于前背景分類。
2. 3D 邊界框回歸損失
-
通常為多項組合,包括中心位置、大小、方向等:
? 位置損失:
-
L1 / Smooth L1:對中心點 (x,y,z)(x, y, z)。
-
Center Distance Loss:點云中心與GT中心的距離。
? 尺寸損失:
-
對 w,h,lw, h, l 使用 L1/Smooth L1。
? 朝向損失(方向角):
-
角度回歸 loss:L1 / Smooth L1。
-
角度分類 loss:方向離散為多個 bin,使用分類損失。
-
Sin-Cos 回歸 loss:使用 sin?(θ),cos?(θ)\sin(\theta), \cos(\theta) 規避周期性問題。
3. IoU類損失
-
3D IoU Loss(較難優化但直觀):如 PointRCNN。
-
BEV IoU Loss(Bird's Eye View):簡化空間問題。
4. 關鍵點 / 熱力圖損失
-
Heatmap Loss(如 CenterPoint, PV-RCNN)用于預測中心點。
-
通常為 Gaussian Focal Loss。
-
-
Offset Loss:預測熱圖中心點到真實中心點的偏移量。
5. 方向不變性損失
-
Corner Loss(如 Frustum-PointNet):
-
通過角點預測反推旋轉和平移,更魯棒。
-
-
Chamfer Distance(點云匹配):在 PointNet++ 等方法中。
?? 三、檢測 Loss 組合示意
| 模型 | 分類 Loss | 回歸 Loss | 特殊項 |
|---|---|---|---|
| Faster R-CNN | Cross Entropy | Smooth L1 | - |
| YOLOv5 | BCE / Focal | CIoU Loss | Objectness Loss |
| RetinaNet | Focal Loss | Smooth L1 | - |
| CenterNet | Heatmap Loss | Offset + Size (L1) | - |
| PointRCNN | Focal + IoU | 3D Box Regression + Corner Loss | Direction Class |
| PV-RCNN | Heatmap + CE | L1 + 3D IoU + Sin-Cos Angle Loss | RoI Pool + BEV Match |
| CenterPoint | Heatmap + CE | Offset + Size + Direction (multi-part) | Gaussian Focal + Direction Bin |
? 總結:選擇檢測 Loss 的核心要點
| 目標 | 推薦 Loss 類型 |
|---|---|
| 二分類 / 多分類 |

![[硬件電路-115]:模擬電路 - 信號處理電路 - 功能放大器工作分類、工作原理、常見芯片](http://pic.xiahunao.cn/[硬件電路-115]:模擬電路 - 信號處理電路 - 功能放大器工作分類、工作原理、常見芯片)


全面解析)
:部署Kafka消息隊列)

)

)






)


