文章目錄
- 前言
- 一、摘要與引言
- 二、Related Word
- 2.1 可解釋的端到端架構
- 2.2 鳥瞰圖
- 2.3 未來預測
- 2.4 規劃
- 三、方法
- 3.1 感知bev特征積累
- 3.1.1 空間融合(幀的對齊)
- 3.1.2 時間融合
- 3.2 預測:雙路徑未來建模
- 3.3 規劃:先驗知識的整合與提煉
- 4. 端到端學習的Overall Loss
- 4.1 感知loss
- 4.2 預測loss
- 4.3 Planning Loss:兩階段 + 排名 + 回歸
前言
題目:ST-P3: End-to-end Vision-based Autonomous Driving via Spatial-Temporal Feature Learning
2022年的視覺端到端論文。
SV(Surrounding Vehicle)
ego-motion:自身運動
真的好難 :(
一、摘要與引言
提出了一種聯合時空特征學習的端到端方法,明確設計網絡中的中間表示,同時為感知、預測和規劃任務提供一組更具代表性的特征,具體而言:
- 提出了一種以自我為中心的對齊累積技術,在鳥瞰圖轉換之前保留3D空間中的幾何信息以進行感知。
- 雙路徑建模,以考慮過去的運動變化,用于未來的預測。
- 引入了一種基于時間的細化單元,用于補償識別基于視覺的元素以進行規劃。
首次對version-based端到端自動駕駛的每個部分進行拆分研究,實驗證明我們最好。
基于激光雷達的[5,56,55,16]和基于視覺的[26,42,51]。
4. Lidar-based
[5] Casas, S., Sadat, A., Urtasun, R.: Mp3: A unified model to map, perceive, predict and plan. In: CVPR (2021)
[56] Zeng, W., Wang, S., Liao, R., Chen, Y., Yang, B., Urtasun, R.: Dsdnet: Deep structured self-driving network. In: ECCV (2020) 2, 3, 4, 5, 6
[55] Zeng, W., Luo, W., Suo, S., Sadat, A., Yang, B., Casas, S., Urtasun, R.: End-to-end interpretable neural motion planner. In: CVPR (2019)
[16] Casas, S., Sadat, A., Urtasun, R.: Mp3: A unified model to map, perceive, predict and plan. In: CVPR (2021)
5. version-based
[26] Hu, A., Murez, Z., Mohan, N., Dudas, S., Hawke, J., Badrinarayanan, V., Cipolla, R., Kendall, A.: Fiery: Future instance prediction in bird’s-eye view from surround monocular cameras. In: ICCV (2021) 2, 3, 5, 6, 8, 10, 12, 13, 22
[42] Philion, J., Fidler, S.: Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d. In: ECCV (2020) 2, 3, 5, 6, 10, 12
[51] Wang, H., Cai, P., Sun, Y., Wang, L., Liu, M.: Learning interpretable end-to-end vision-based motion planning for autonomous driving with optical flow distillation. In: ICRA (2021) 2, 3, 5, 6, 10, 12
Lidar-based method通常與HDmap決定,但是高精地圖存在各種弊端。
Vision-based method的關鍵挑戰,對應三個模塊和核心創新點:
- 將特征表示從透視圖轉化到鳥瞰圖空間。LSS method [42] 從多視圖中提取透視特征,通過深度估計到3D并融合到BEV空間中。同時LSS把時間納入框架,將過去幀的特征投影到當前的坐標視圖上,這些技術由數據集提供,或光流中學習。但LSS孤立的逐幀投影特征,我們是在3D空間中對齊積累所有的特征。
[42] Philion, J., Fidler, S.: Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d. In: ECCV (2020) 2, 3, 5, 6, 10, 12 - 在BEV空間中Equipped with代表性特征(物體位置、速度),我們將預測任務 formulate as 對未來時刻的每個物體實例進行分割,像FIERY [26] 一樣。
但提高未來預測的準確性,需要考慮過去的運動變化 [24],這在FIERY[26]中缺失了。
[24] Hu, A., Cotter, F., Mohan, N., Gurau, C., Kendall, A.: Probabilistic future prediction for video scene understanding. In: ECCV (2020) 5
[26] Hu, A., Murez, Z., Mohan, N., Dudas, S., Hawke, J., Badrinarayanan, V., Cipolla, R., Kendall, A.: Fiery: Future instance prediction in bird’s-eye view from surround monocular cameras. In: ICCV (2021) 2, 3, 5, 6, 8, 10, 12, 13, 22。 - 規劃模塊在感知預測輸出的候選軌跡(采樣生成) 和 語義信息的基礎上生成 自車的最優行駛軌跡(通過 學習based 或 規則based 的方法,計算每個候選軌跡的可信度),同時去除HDmap并 向網絡提供高級命令,這是抄的MP5 [5] 。但是MP5視覺識別模塊是現成的、預訓練的,沒有進行特別定制或優化。所以我們將視覺信息集成到同一網絡中的輕量級 GRU 單元中(GRU:遞歸神經網絡模型,用于處理 時序數據 和 連續性信息,它可以幫助系統 更好地理解動態變化的環境)
[5] Casas, S., Sadat, A., Urtasun, R.: Mp3: A unified model to map, perceive, predict and plan. In: CVPR (2021) 2, 3, 4, 5, 6, 9
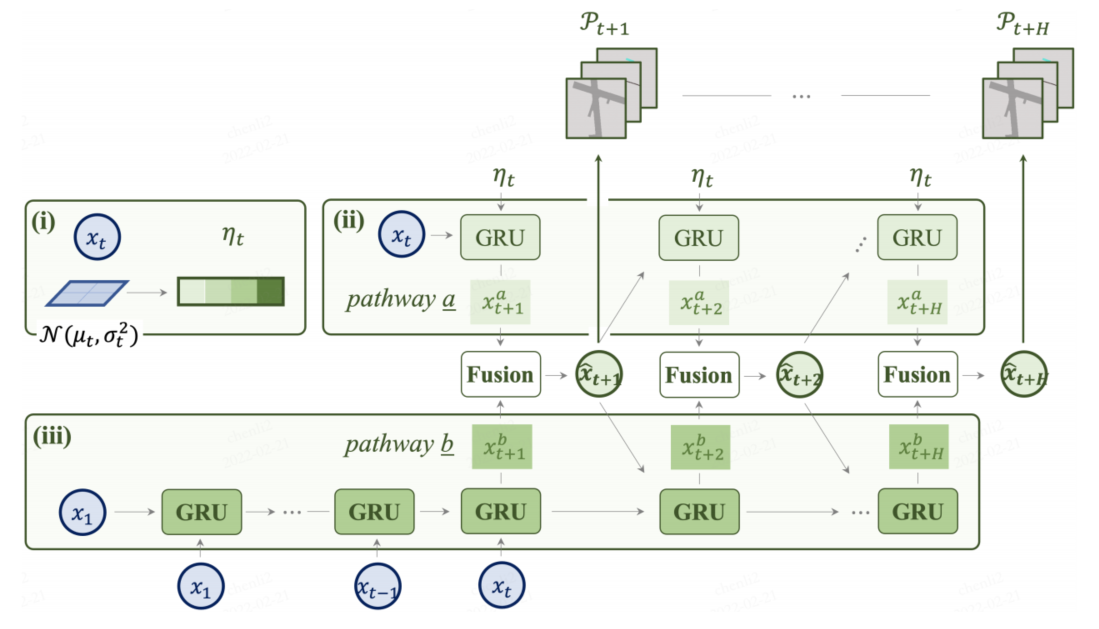
ST-P3網絡架構圖:
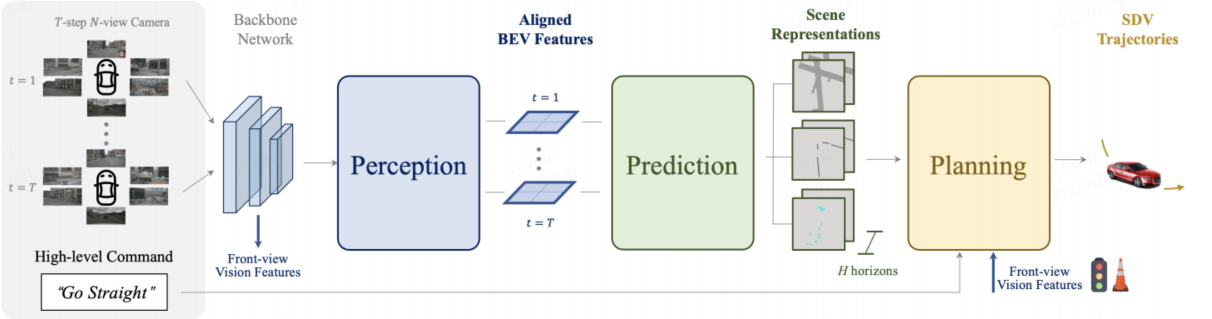
感知:自我中心對齊累積保證了特征(過去和現在)在3D空間中對齊和聚合,以在BEV變換之前保留幾何信息。
預測:引入了雙路徑方案(現在的和過去的),以引入過去的變化來追求未來的預測。
規劃:先驗知識被輸入到一個細化單元中,以生成最終軌跡,該軌跡具有集成的成本量和來自高級命令的采樣器。
綜上所述,ST-P3做出了如下貢獻:
- 提出了一個新的端到端框架ST-P3,包括三個新的改進:感知自我中心對齊累積、預測雙路徑建模和預測模塊先驗知識細化。
- 系統地研究了自動駕駛任務的可解釋端到端系統的每個部分,這是視覺模塊化端到端的開創性文章。
- 實驗無敵。
二、Related Word
2.1 可解釋的端到端架構
Lidar-based較多,但vision-based較少。總的來說,基于激光雷達的方法在具有挑戰性的城市場景中表現良好。不幸的是,這些工作中的數據集和基線并沒有發布進行比較;而lidar-based的方法同時比較依賴HDmap,Casas等人(MP3)[5]根據分割以及其他代理的當前和未來狀態構建了一個在線地圖。
2.2 鳥瞰圖
鳥瞰圖(BEV)表示法非常適合規劃和控制任務[38,57,40,12,1]。
盡管激光雷達和高清地圖中的信息可以很容易地在BEV中表示,但如何將視覺輸入從相機視圖投影到BEV空間是一個不小的問題。
方法概述:
基于學習的投影方法通常無法保證質量,因為BEV沒有真實數據來監督投影過程;
Loukkal等人[34]明確地使用圖像和BEV平面之間的單應性將圖像投影到BEV中;
[32,10]通過空間交叉注意力和預定義的BEV查詢獲取BEV特征;
LSS[42]和FIERY[26]以估計的深度和圖像內參進行投影,表現出令人印象深刻的性能(你“融合”的他倆-,-);
但FIERY用的過去的特征幀,俺們用的過去所有的3D特征(Fastlio),然后是獨創的自我中心對齊,積累對齊的特征。
2.3 未來預測
當前通常輸入為:地面真實感知信息和HDmap。但如果這個感知輸入來自其他模塊,很容易產生累計誤差。
而端到端輸入:raw傳感器數據。
受視頻未來預測的啟發[24],我們將概率不確定性與過去的動態相結合,以預測多樣化和合理的未來場景。
2.4 規劃
隱式方法:網絡直接生成軌跡或控制命令,即系統輸出的是最終的動作或路徑。這種方法缺乏可解釋性和魯棒性。
顯式方法:通常通過 軌跡采樣器(sampling)生成多個候選軌跡,然后使用代價地圖(cost map)來評估每個軌跡的優劣,選擇最低成本的軌跡。顯式方法可以精細調整候選軌跡,但相對來說也更復雜。
代價地圖可以基于分割和HDmap等中間表示,用手工制作的規則[48,5,16]構建;或者可以直接從網絡中學習[55]。
DSDNet [56] 結合了手工制作和基于學習的成本,以獲得綜合成本量。我們采用這種組合來選擇最佳軌跡。
[56] Zeng, W., Wang, S., Liao, R., Chen, Y., Yang, B., Urtasun, R.: Dsdnet: Deep structured self-driving network. In: ECCV (2020) 2, 3, 4, 5, 6
然而,我們通過添加一個帶有導航信號的額外GRU細化單元來修改管道,以進一步調整和優化所選軌跡。
三、方法
3.1 感知bev特征積累
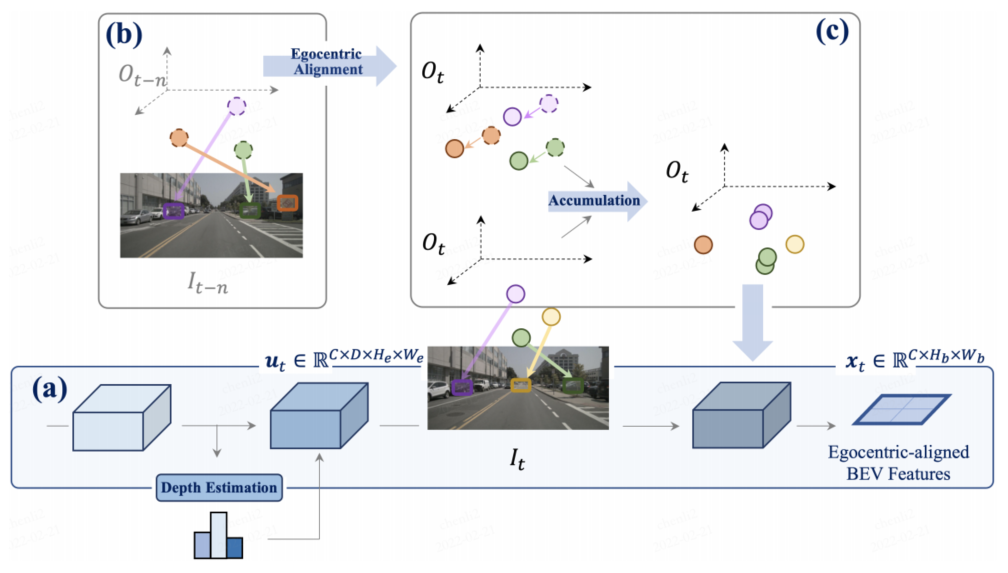
以自我為中心的感知積累:
(a)通過深度估計將當前時間戳的特征提升到3D,并在對齊后合并為BEV特征xt;
(b-c)將先前幀中的3D特征與當前視圖對齊,并與所有過去和當前狀態融合,從而增強特征表示。(空間和時間的融合)
空間融合:對所有時間戳的多視圖圖像進行處理,并將其轉換為當前以自我為中心的3D空間;
時間融合:以累積的方式增強靜態元素和運動對象的特征鑒別,并采用時間模型來實現最終的融合。
3.1.1 空間融合(幀的對齊)
每個攝像頭圖像 通過backbone網絡獲取特征
通過backbone網絡獲取特征 和深度信息
和深度信息 ,特征點深度信息由[42]計算,其中C是特征通道的數量,D表示離散深度的數量,(He,We)表示空間大小。
,特征點深度信息由[42]計算,其中C是特征通道的數量,D表示離散深度的數量,(He,We)表示空間大小。
由于無法獲得確切的深度信息,我們將特征和深度整合到全局3D frame中,特征和深度的外積表示他們之間的關系被u聯合表示。
然后,使用相機內外參將相機特征frustums ui∈{u1i,…,un-i} 轉換為全局3D坐標,其原點位于時間i時自我車輛的慣性中心。
另一方面,空間融合需要將過去的特征與當前幀對齊,以便進行下游預測和規劃任務。
3.1.2 時間融合
目的:為了增強對靜態物體的感知能力。
核心思想:多幀融合,把歷史信息加權到當前幀,以強化靜態特征。
實現:經典method一般直接利用具有堆疊BEV特征的3D卷積。但考慮到地面上的禁止物體(車道和禁止的車輛),各個立方體相同位置的特征應該相似,所以
其中
xt:t幀融合后的特征圖
bt:t幀原始 BEV 特征圖(未融合的當前幀)
ai:權重衰減系數,每往前一幀,權重衰減一半
融合方式:當前幀的 BEV 特征 加上 所有歷史幀 BEV 特征的加權和。(第一幀直接等于它自己的特征)
為了更準確地感知動態對象,我們將這些特征輸入到通過3D卷積實現的時間融合網絡中。為了補償自我車輛運動引起的偏差,我們通過在空間通道中連接運動矩陣來將其添加到特征中。

其中m1~t表示自我運動矩陣(ego-motion matrix),C表示3D卷積網絡。這個自我運動矩陣通常表示 相鄰時間幀之間自車(ego-vehicle)的姿態變化。此時序融合網絡(3D Conv + ego-motion)會參與端到端訓練和整體優化,在預測之前,它直接影響模型的中間特征。它的輸出會繼續送到后續的感知、預測、規劃任務模塊。有梯度回傳,訓練時權重會被更新。
思考:為什么不直接用SE(3)做補償,而要放到網絡里?一句話總結: SE(3) 只能做“死板”的幾何對齊,而我們要融合的是含噪位姿、語義化高維特征和動態場景的對齊,所以交給網絡完成。
傳統SLAM的邏輯:
直接對稠密/稀疏點云或圖像做 幾何變換(warp),通過SE(3)將前后幀對齊。輸入是觀測,輸出是狀態(位姿),再拼接地圖。
端到端BEV網絡的邏輯:
Backbone 提取的是高維特征圖(feature map),而不是稠密幾何。
想把前幾幀特征融合到當前幀,就要對齊這些高維特征。
這時,可以用幾何位姿去 warp 特征,但 warp 后是否最佳?深度學習傾向于再學一個小網絡(例如3D卷積)去做“補償+融合”,理由:
- 特征并非嚴格幾何空間點,可能包含語義/時間信息 → 直接warp可能信息丟失。
- 動態物體問題(warp后,其他車輛的位置不一樣)。
- 有時位姿信息本身有噪聲,網絡可以學到魯棒融合。
3.2 預測:雙路徑未來建模
在動態駕駛環境中,傳統的運動預測算法[53,20,17]通常將未來的軌跡預測為確定性或多模態結果,但這無法覆蓋未來的所有可能性,特別是由于 多方交互(例如駕駛行為、交通要素和道路環境)。
為了解決 未來預測的不確定性,這個方法通過 建模條件不確定性 來改進預測模型。
未來軌跡預測 的 雙路徑建模
歷史特征(x1, …, xt):表示從時刻1到 t 的過去觀測數據,用于模型的初步預測。
未來的不確定性分布:這是基于 高斯分布 的模型,包含了未來的不確定性。這個分布有 均值 和 方差,通過采樣生成未來的不確定性特征。人話版:這個 μ 是 BEV 場景特征經過編碼后得到的“未來可能場景的壓縮表示”,它不是像素,而是一個隱藏特征向量,代表預測模塊對未來的最佳猜測。
雙路徑建模:模型有兩個路徑來處理輸入:
路徑一:使用 歷史特征(x1,…,xt)作為 GRU(門控循環單元,Gated Recurrent Unit) 的輸入進行預測,x1是初始的隱狀態。
路徑二:使用來自未來不確定性分布 的樣本和初始隱藏狀態xt 作為 GRU 的輸入(ii)
的樣本和初始隱藏狀態xt 作為 GRU 的輸入(ii)
混合高斯預測:通過結合歷史特征和未來不確定性的預測結果,生成未來時刻的特征。

其中G表示GRU的過程。對偶建模遞歸預測未來的狀態(x?t+1,…,x?t+H)。
所有特征(x1,…,xt)和 未來的狀態(x?t+1,…,x?t+H)輸入到解碼器D中。此解碼器有多個輸出頭(multi-head),每個 head 對應一個特定任務,最終輸出多個可解釋的場景元素:
? 實例分割 Head
輸出:Instance centerness(實例中心度)Offset(實例偏移)Future flow(未來運動流場)
作用:用于表示動態目標的位置與未來運動趨勢。
? 語義分割 Head
輸出:車輛、行人等主要參與者的語義類別。
作用:明確哪些區域由關鍵目標占據。
? HD Map 生成 Head
輸出:可行駛區域(Drivable area)車道線(Lanes)
作用:提供結構化地圖信息,增強規劃可解釋性。
? Cost Volume Head(代價體積)
輸出:每個位置在規劃時間范圍內的代價(即 SDV 選擇該位置的難度或風險)
作用:供規劃模塊評估最優軌跡。
? Past Frame Decoding Head(歷史特征精細化)
目的:提高歷史特征的準確性,增強 Dual Modelling(歷史-未來雙向建模)性能。
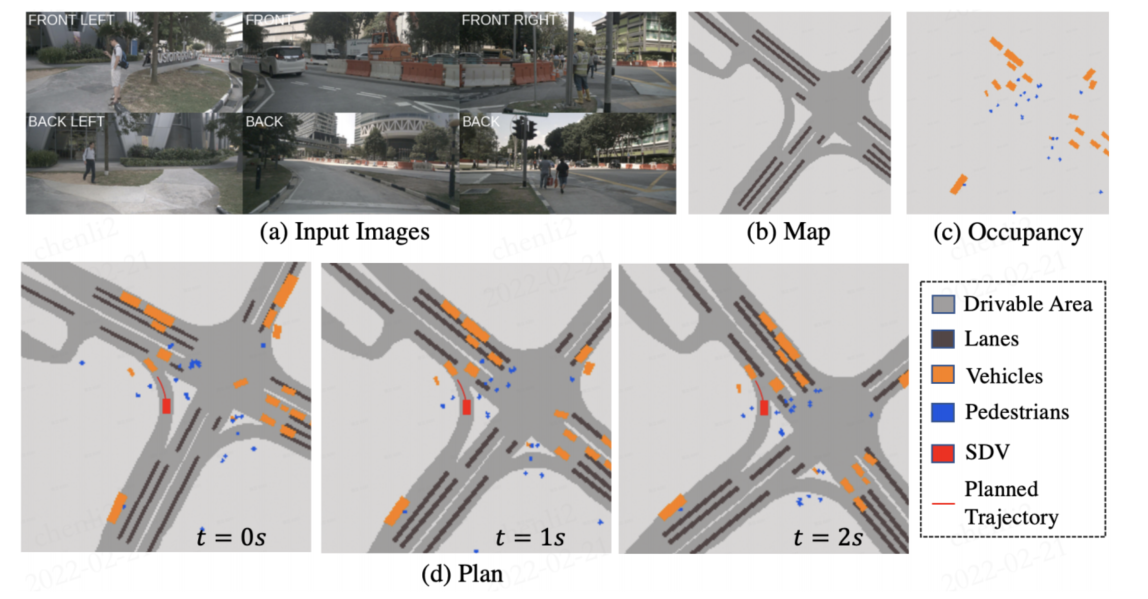
SDV成功地生成了一個安全的軌跡,可以在不與路邊或前方車輛碰撞的情況下進行左轉。
留一個坑:
SDMap 輸入模型,用于特征融合(提升 BEV 語義)
- 該方法通過 雙路徑建模 來捕捉 不確定性,考慮 多模態未來預測。
- 歷史特征 和 未來不確定性 共同影響最終的預測結果,使得 軌跡預測 更加魯棒,能夠處理復雜的環境交互。
- 通過 混合高斯分布 和 遞歸預測,能夠 連續預測未來狀態,而不僅僅是靜態的軌跡。
- 解碼器生成多個輸出,有助于 可解釋性,如輸出未來的 車輛軌跡、障礙物位置、可駕駛區域等。
3.3 規劃:先驗知識的整合與提煉
設計了一個運動規劃器,該規劃器對一組不同的軌跡進行采樣,并選擇一個最小化學習成本函數的軌跡(抄的[55,48,5])
區別:通過一個額外的優化步驟與它們區分開來,該步驟使用時間模型來整合目標點和交通燈的信息
輸入:
SDV 當前動態狀態(位置、速度、航向)
預測模塊的輸出:Occupancy Probability Field(預測占用概率場)、Cost Volume(學習到的規劃代價體積)。不依賴HD Map。
高層命令:Forward / Turn Left / Turn Right
相機特征(通過 GRU,用于推斷交通燈狀態)
f 表示軌跡代價函數(trajectory cost function),用于評估每一條候選軌跡 𝜏,并最終選擇代價最小的軌跡 𝜏?

𝜏:一條候選軌跡(通過 bicycle model 采樣),這些軌跡不是端到端網絡直接預測的,而是根據物理模型和控制輸入隨機/系統采樣出來的
o:預測模塊輸出的占用概率場(occupancy predictions)
m:地圖表示(這里是預測模塊輸出的HD map 結構,如 drivable area 和 lanes)
 :各部分代價函數的可學習權重
:各部分代價函數的可學習權重
三個代價函數的詳細介紹:
第一個部分:Rule-based / Protocol cost
檢查軌跡是否與預測占用概率 o 或地圖約束(車道、drivable area)沖突
邏輯:
如果軌跡穿過其他 agent 占用區域 → 高懲罰
維持一定安全距離 → 減少碰撞風險
作用:保證安全性
第二個部分:Learning-based Cost Volume
來自預測模塊學習到的 Cost Volume Head
Cost Volume 表示“每個位置在未來是否適合 SDV 到達”,是學習得到的規劃代價圖
好處:模型自動學習復雜場景代價(例如交叉口風險),而非手寫規則
第三個部分:Regularization Cost
舒適性 → 懲罰過大橫向加速度、曲率、加加速度(jerk)
進度 → 獎勵前進,懲罰停滯
作用:讓軌跡不僅安全,還平滑、符合駕駛體驗
在采樣得到的一組軌跡 中,通過計算 f(),選出代價最小的軌跡:

𝜏?是最優軌跡。
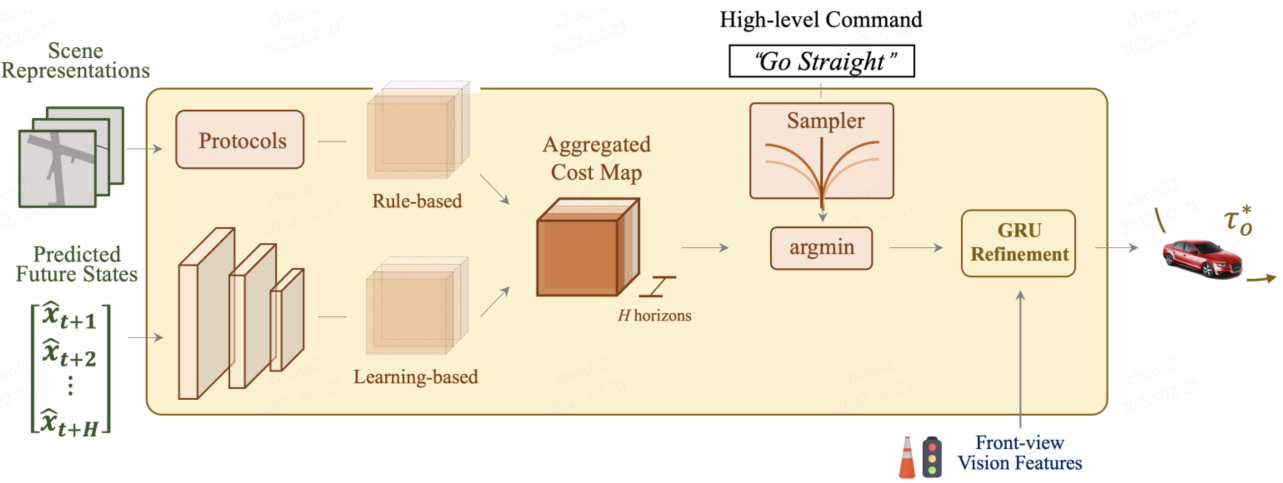 模型用 Rule-based 和 Learning-based 兩種代價源,生成統一的 Cost Map,采樣軌跡并選擇代價最小的軌跡,再用 GRU 融合交通燈信息優化,輸出最終軌跡。
模型用 Rule-based 和 Learning-based 兩種代價源,生成統一的 Cost Map,采樣軌跡并選擇代價最小的軌跡,再用 GRU 融合交通燈信息優化,輸出最終軌跡。
- 預測輸出 → Cost Volume(學習型代價圖)
- 規劃模塊:
接收 Cost Volume
結合 Rule-based protocols(安全、車道約束)
加上 comfort/progress cost
聚合成 Aggregated Cost Map - 軌跡采樣 + argmin 選最優
思考: Rule-based 的存在是否影響整個系統端到端的形式(暫時思考,不知道是否正確)
從“數據流”角度:
模型仍舊從傳感器輸入走完整管線輸出控制動作,中間沒有人類在線干預。因此推理鏈路仍是端到端。
從“訓練/優化”角度:
Rule-based 部分不需要學習(或只學習權重
Learning-based Cost Volume、語義/占用預測、GRU refinement 是學習型;
最終由綜合代價挑軌跡。因此這是學習與規則融合的端到端規劃。
從“安全落地”角度:
純神經網絡輸出軌跡很難直接上車;引入規則 = 給神經網絡加保險帶。很多工業界方案(Waymo/特斯拉過渡階段論文、ChauffeurNet 風格、Learning-from-Plans 框架等)都用了類似思想:學模型 + 規則安全層。
不使用Rule-based

4. 端到端學習的Overall Loss
整體訓練結構:
多幀圖像/傳感器輸入 ─┐
│→ 編碼器 & BEV特征對齊共享主干
│
├─ Perception Head (當前&歷史分割/實例、車道、可行駛區、映射、輔助深度)
│
├─ Prediction Head (未來時間序列的語義/實例預測;基于共享BEV特征+時序建模)
│
└─ Planning Head
· 軌跡采樣 τ (基于動力學模型/柵格候選)
· 上下文評分 f(τ, c) (c 來自感知+預測生成的上下文/Cost map 等)
· 選最優 τ*(訓練時用排名/hinge損避免不可導 argmin)
· GRU 精修 → 輸出 τ*_o
我們通過利用以下損失函數,以端到端的方式通過感知、預測和規劃來優化我們的模型:

其中權重α、β是可學習的(非手調),以根據相應任務損失的梯度來平衡不同任務中的規模。
4.1 感知loss
監督目標來自數據集中已標注或可預處理得到的 BEV 語義、實例、車道、可行駛區、深度等:
語義分割(當前 & 過去幀):Top-k Cross-Entropy
BEV 中背景像素極多,直接 CE 會被背景主導;Top-k 只對損失最高的前 k% 像素反向傳播,使前景學習更有效。
實例分割(中心 / offset / flow)
中心度 supervision:L2 損失。
offset & flow:L1 損失(更魯棒于異常大誤差)。
車道 & Drivable 區域:Cross-Entropy。
映射(mapping):通常也是柵格分類/回歸任務(視論文定義,可歸入上面幾類或獨立項)。
輔助深度損失:
許多現有工作只通過下游規劃間接學深度(弱監督,且依賴最終損失設計,解釋性差)。這里作者先用 外部網絡預估深度(可視為 pseudo GT),然后對本模型深度分支直接監督,使 BEV 幾何一致性更可控。

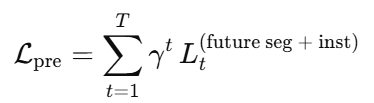
4.2 預測loss
預測模塊要輸出 未來多時刻 的語義 & 實例結果(同上面 Perception 類型的表示,但沿時間軸往前看)。
同樣使用 Top-k Cross-Entropy(語義類)與相應實例分支損失形式,保持任務一致性。
時間折扣(exponential discount):越遠的未來不確定性越大 → 給更遠時刻的損失乘以γ (0<γ<1),或論文設定的指數衰減權重,使訓練集中于近未來、又不完全忽略遠期趨勢。
4.3 Planning Loss:兩階段 + 排名 + 回歸
(a) 樣本軌跡集 τ 的生成
根據車輛運動學(如自行車模型)、速度/轉向采樣、時間長度等,離散生成一批候選軌跡 {𝜏}。這些是 固定的“proposal”軌跡,不需要可導;后續網絡通過評分區分它們。
(b) 軌跡評分與選擇
用感知+預測輸出融合成的上下文(cost map、靜態地圖、動態障礙、車道、預測占用等)記為c。規劃網絡學習一個評分函數f(),用來反映軌跡與上下文/安全/規則/目標之間的匹配度。
訓練時不能直接對 argmin 做反傳,因此引入 max-margin (hinge) 排名損:

𝜏h:專家(人類駕駛)軌跡。
對每個負例軌跡 𝜏(采樣集里非專家的候選),希望專家比它“好”一個 margin;margin 與兩軌跡的距離d(𝜏,𝜏h)成正比(更差的候選要留更大間隔)。
[ ]+:ReLU/hinge,若專家已優于負例超過 margin,則不產生梯度;否則反向推動網絡調節f()
? 精修 (Refinement)
真實部署時,模型先在候選集中找到得分最優的 𝜏?,再送入一個 GRU-based refinement module,輸出更平滑/動態可行/高分辨的最終軌跡
𝜏𝑜?,為保證輸出貼近專家軌跡,再加一個 L1 回歸損:

(d) 合成規劃損–文章公式8


 的弊端及修復方式)

)
提取知識三元組并構建可視化知識圖譜:從文本到圖譜的完整實現)
基于 Go 和 gopacket+Fyne 的跨平臺網絡抓包工具開發實錄)





)



?的小樣本故障診斷模型)


)
