問題分析
在鉆孔過程中,鉆頭的運動可以分為兩部分:
- 公轉:鉆頭的軸線繞理想軸線(鉆孔中心線)做圓周運動。
- 自轉:鉆頭繞自身軸線做旋轉運動。
由于公轉和自轉的疊加,鉆尖的運動軌跡會形成復雜的曲線,最終鉆出多邊形孔。我們需要建立一個數學模型,詳細描述鉆尖的運動軌跡。
1. 定義坐標系和參數
- 設鉆孔中心為原點 $ O ,建立固定坐標系 ,建立固定坐標系 ,建立固定坐標系 Oxyz $,其中 $ z $軸為理想軸線(鉆孔中心線)。
- 鉆頭的公轉半徑為$ R$(即鉆頭軸線到理想軸線的距離)。
- 鉆頭的自轉半徑為$ r $(即鉆尖最大外徑處到鉆頭軸線的距離)。
- 鉆頭的公轉角速度為 $ \omega_p $(繞理想軸線旋轉的角速度)。
- 鉆頭的自轉角速度為 $ \omega_s $(繞自身軸線旋轉的角速度)。
- 時間變量為 $ t $。
2. 描述鉆頭軸線的運動(公轉)
鉆頭軸線在公轉過程中繞理想軸線做圓周運動。其位置矢量 $ \mathbf{R}_c(t) $ 可以表示為:
R c ( t ) = ( R cos ? ( ω p t ) R sin ? ( ω p t ) 0 ) \mathbf{R}_c(t) = \begin{pmatrix} R \cos(\omega_p t) \\ R \sin(\omega_p t) \\ 0 \end{pmatrix} Rc?(t)= ?Rcos(ωp?t)Rsin(ωp?t)0? ?
3. 描述鉆尖相對于鉆頭軸線的運動(自轉)
鉆尖繞鉆頭軸線做自轉運動,其位置矢量 $ \mathbf{r}_s(t) $可以表示為:
r s ( t ) = ( r cos ? ( ω s t + ? ) r sin ? ( ω s t + ? ) 0 ) \mathbf{r}_s(t) = \begin{pmatrix} r \cos(\omega_s t + \phi) \\ r \sin(\omega_s t + \phi) \\ 0 \end{pmatrix} rs?(t)= ?rcos(ωs?t+?)rsin(ωs?t+?)0? ?
其中 $ \phi $ 是初始相位角,表示鉆尖在 $ t = 0 $時的初始位置。
4. 描述鉆尖的絕對運動
鉆尖的絕對位置 $ \mathbf{r}(t)$是鉆頭軸線的公轉運動與鉆尖自轉運動的疊加:
r ( t ) = R c ( t ) + r s ( t ) \mathbf{r}(t) = \mathbf{R}_c(t) + \mathbf{r}_s(t) r(t)=Rc?(t)+rs?(t)
即:
r ( t ) = ( R cos ? ( ω p t ) + r cos ? ( ω s t + ? ) R sin ? ( ω p t ) + r sin ? ( ω s t + ? ) 0 ) \mathbf{r}(t) = \begin{pmatrix} R \cos(\omega_p t) + r \cos(\omega_s t + \phi) \\ R \sin(\omega_p t) + r \sin(\omega_s t + \phi) \\ 0 \end{pmatrix} r(t)= ?Rcos(ωp?t)+rcos(ωs?t+?)Rsin(ωp?t)+rsin(ωs?t+?)0? ?
5. 分析運動軌跡的特性
鉆尖的運動軌跡取決于公轉角速度 $ \omega_p $ 和自轉角速度 $\omega_s $的比值:
- 如果 $ \omega_p $ 和$ \omega_s $ 的比值為有理數,鉆尖的運動軌跡是閉合的,形成多邊形孔。
- 如果 $\omega_p $ 和 $ \omega_s $ 的比值為無理數,鉆尖的運動軌跡是非閉合的,形成復雜的曲線。
5.1 多邊形孔的形成條件
假設 $ \omega_p $ 和 $ \omega_s $ 的比值為有理數,即:
ω p ω s = m n \frac{\omega_p}{\omega_s} = \frac{m}{n} ωs?ωp??=nm?
其中 m m m 和$n $是互質的整數。此時,鉆尖的運動軌跡是閉合的,且形成 $ n $邊形的多邊形孔。
5.2 鉆尖軌跡的參數方程
鉆尖的軌跡可以表示為:
x ( t ) = R cos ? ( ω p t ) + r cos ? ( ω s t + ? ) x(t) = R \cos(\omega_p t) + r \cos(\omega_s t + \phi) x(t)=Rcos(ωp?t)+rcos(ωs?t+?)
y ( t ) = R sin ? ( ω p t ) + r sin ? ( ω s t + ? ) y(t) = R \sin(\omega_p t) + r \sin(\omega_s t + \phi) y(t)=Rsin(ωp?t)+rsin(ωs?t+?)
6. 特殊情況分析
6.1 當 $ \omega_p = \omega_s $
如果公轉角速度和自轉角速度相等$ \omega_p = \omega_s $,則鉆尖的運動軌跡為:
x ( t ) = R cos ? ( ω p t ) + r cos ? ( ω p t + ? ) x(t) = R \cos(\omega_p t) + r \cos(\omega_p t + \phi) x(t)=Rcos(ωp?t)+rcos(ωp?t+?)
y ( t ) = R sin ? ( ω p t ) + r sin ? ( ω p t + ? ) y(t) = R \sin(\omega_p t) + r \sin(\omega_p t + \phi) y(t)=Rsin(ωp?t)+rsin(ωp?t+?)
此時,鉆尖的運動軌跡是一個半徑為 $ R + r $ 的圓。
6.2 當 $ \omega_p = -\omega_s $
如果公轉角速度和自轉角速度大小相等但方向相反$ \omega_p = -\omega_s $,則鉆尖的運動軌跡為:
x ( t ) = R cos ? ( ω p t ) + r cos ? ( ? ω p t + ? ) x(t) = R \cos(\omega_p t) + r \cos(-\omega_p t + \phi) x(t)=Rcos(ωp?t)+rcos(?ωp?t+?)
y ( t ) = R sin ? ( ω p t ) + r sin ? ( ? ω p t + ? ) y(t) = R \sin(\omega_p t) + r \sin(-\omega_p t + \phi) y(t)=Rsin(ωp?t)+rsin(?ωp?t+?)
此時,鉆尖的運動軌跡是一個半徑為 $ |R - r| $ 的圓。
7. 多邊形孔的邊數
多邊形孔的邊數 $n $ 由自轉角速度$ \omega_s $ 和公轉角速度 $ \omega_p $ 的比值決定:
n = ω s ω p n = \frac{\omega_s}{\omega_p} n=ωp?ωs??
例如:
- 如果 $ \omega_s = 2 \omega_p $,則 $ n = 2$,形成二邊形(即直線)。
- 如果 $\omega_s = 3 \omega_p $,則 $ n = 3 $,形成三角形。
- 如果 $ \omega_s = 4 \omega_p ,則 ,則 ,則 n = 4 $,形成四邊形。
8. 總結
鉆尖的運動軌跡由公轉和自轉的疊加決定,其參數方程為:
x ( t ) = R cos ? ( ω p t ) + r cos ? ( ω s t + ? ) x(t) = R \cos(\omega_p t) + r \cos(\omega_s t + \phi) x(t)=Rcos(ωp?t)+rcos(ωs?t+?)
y ( t ) = R sin ? ( ω p t ) + r sin ? ( ω s t + ? ) y(t) = R \sin(\omega_p t) + r \sin(\omega_s t + \phi) y(t)=Rsin(ωp?t)+rsin(ωs?t+?)
當 $ \omega_p $ 和 $ \omega_s 的比值為有理數時,鉆尖的運動軌跡是閉合的,形成多邊形孔。多邊形孔的邊數 的比值為有理數時,鉆尖的運動軌跡是閉合的,形成多邊形孔。多邊形孔的邊數 的比值為有理數時,鉆尖的運動軌跡是閉合的,形成多邊形孔。多邊形孔的邊數 n$ 由$\omega_s / \omega_p $ 決定。通過調整$ \omega_p $ 和 $\omega_s $ 的比值,可以控制鉆孔的形狀和邊數。
這個模型為鉆頭運動軌跡的分析和優化提供了理論基礎。
為了基于 Python 求解這個模型,我們可以編寫一個程序來計算鉆尖的運動軌跡,并繪制其運動軌跡圖。以下是詳細的步驟和代碼實現:
導入必要的庫
我們需要使用 numpy 進行數學計算,使用 matplotlib 進行繪圖。
import numpy as np
import matplotlib.pyplot as plt
定義參數
定義鉆頭的公轉半徑 $ R 、自轉半徑 、自轉半徑 、自轉半徑 r $、公轉角速度 $ \omega_p $、自轉角速度 $ \omega_s$、初始相位角 $ \phi $ 以及時間范圍。
# 定義參數
R = 5.0 # 公轉半徑
r = 1.0 # 自轉半徑
omega_p = 2.0 # 公轉角速度 (rad/s)
omega_s = 3.0 # 自轉角速度 (rad/s)
phi = 0.0 # 初始相位角
t_max = 10.0 # 最大時間
num_points = 1000 # 時間點數
計算鉆尖的運動軌跡
根據運動方程,計算鉆尖的位置 $ (x(t), y(t)) $。
# 生成時間數組
t = np.linspace(0, t_max, num_points)# 計算鉆尖的位置
x = R * np.cos(omega_p * t) + r * np.cos(omega_s * t + phi)
y = R * np.sin(omega_p * t) + r * np.sin(omega_s * t + phi)
繪制鉆尖的運動軌跡
使用 matplotlib 繪制鉆尖的運動軌跡。
# 繪制鉆尖的運動軌跡
plt.figure(figsize=(8, 8))
plt.plot(x, y, label="Drill Tip Trajectory", color="blue")
plt.scatter(x[0], y[0], color="red", label="Start Point") # 起點
plt.scatter(x[-1], y[-1], color="green", label="End Point") # 終點
plt.title("Drill Tip Trajectory (R={}, r={}, ωp={}, ωs={})".format(R, r, omega_p, omega_s))
plt.xlabel("x")
plt.ylabel("y")
plt.axis("equal")
plt.grid(True)
plt.legend()
plt.show()
完整代碼
以下是完整的 Python 代碼:
import numpy as np
import matplotlib.pyplot as plt# 定義參數
R = 5.0 # 公轉半徑
r = 1.0 # 自轉半徑
omega_p = 2.0 # 公轉角速度 (rad/s)
omega_s = 3.0 # 自轉角速度 (rad/s)
phi = 0.0 # 初始相位角
t_max = 10.0 # 最大時間
num_points = 1000 # 時間點數# 生成時間數組
t = np.linspace(0, t_max, num_points)# 計算鉆尖的位置
x = R * np.cos(omega_p * t) + r * np.cos(omega_s * t + phi)
y = R * np.sin(omega_p * t) + r * np.sin(omega_s * t + phi)# 繪制鉆尖的運動軌跡
plt.figure(figsize=(8, 8))
plt.plot(x, y, label="Drill Tip Trajectory", color="blue")
plt.scatter(x[0], y[0], color="red", label="Start Point") # 起點
plt.scatter(x[-1], y[-1], color="green", label="End Point") # 終點
plt.title("Drill Tip Trajectory (R={}, r={}, ωp={}, ωs={})".format(R, r, omega_p, omega_s))
plt.xlabel("x")
plt.ylabel("y")
plt.axis("equal")
plt.grid(True)
plt.legend()
plt.show()
運行結果
運行上述代碼后,程序會繪制鉆尖的運動軌跡圖。根據參數 $ R 、 、 、 r 、 、 、 \omega_p $ 和 $ \omega_s $ 的不同,軌跡可能是圓形、多邊形或其他復雜形狀。
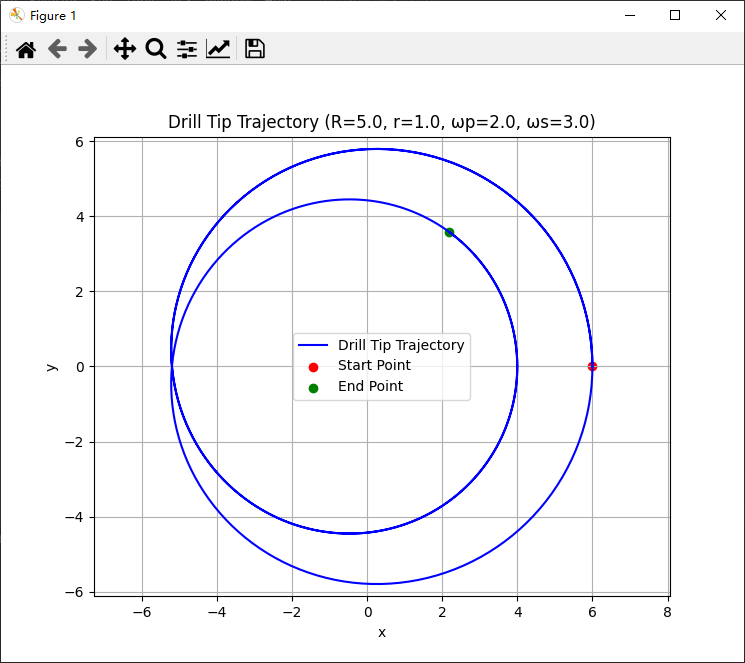
示例結果:
- 如果 $ \omega_p = 2 $ 和 $ \omega_s = 3 $,軌跡可能是一個五邊形。
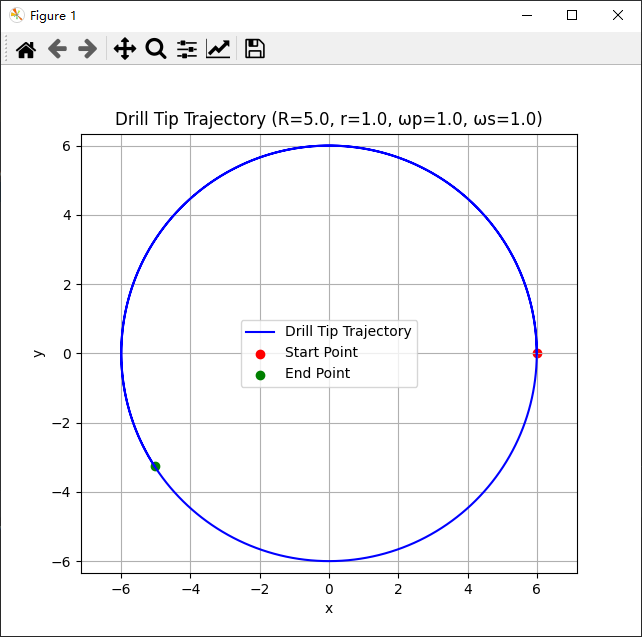
- 如果 $\omega_p = 1 $ 和 $ \omega_s = 1 $,軌跡是一個半徑為 $ R + r $ 的圓。
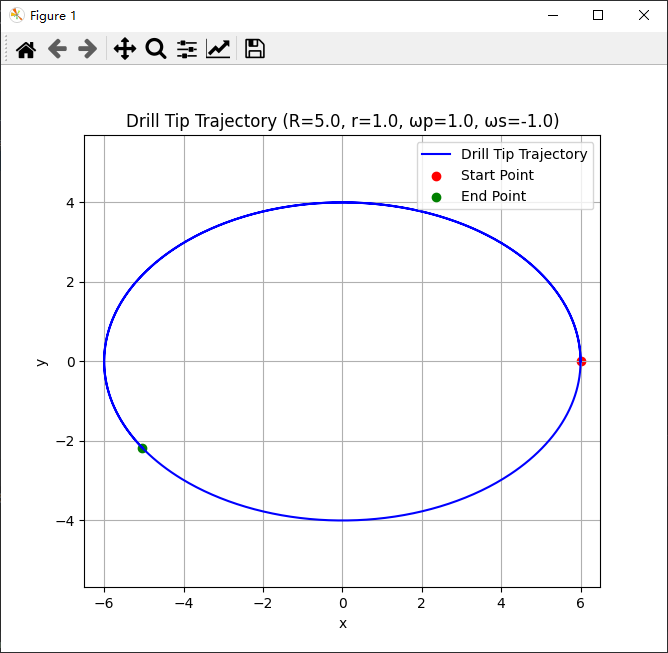
- 如果 $\omega_p = 1 $ 和 $\omega_s = -1 $,軌跡是一個半徑為 $ |R - r| $的圓。
參數調整
可以通過調整以下參數來觀察不同的運動軌跡:
- 公轉半徑 $ R 和自轉半徑 和自轉半徑 和自轉半徑 r $。
- 公轉角速度 $ \omega_p $ 和自轉角速度 $ \omega_s$。
- 初始相位角 $ \phi$。
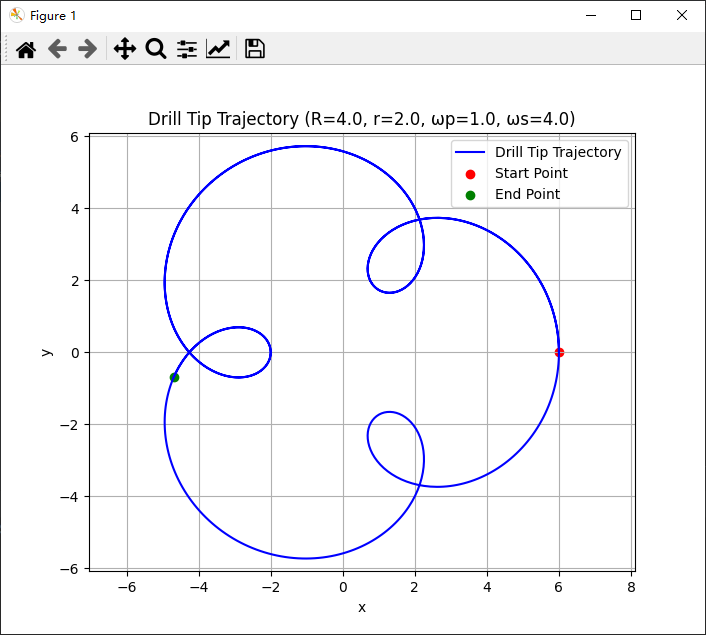
例如:
R = 4.0
r = 2.0
omega_p = 1.0
omega_s = 4.0




——Java 注解(持續更新))
)

高層次設計概覽)


分頁效果)

機制精要)
的兩種解法)





