一、圖像梯度
在圖像處理中,「梯度(Gradient)」是一個非常基礎但又極其重要的概念。它是圖像邊緣檢測、特征提取、紋理分析等眾多任務的核心。梯度的本質是在空間上描述像素灰度值變化的快慢和方向。
但我們如何在圖像中計算梯度?又該選擇什么樣的算子?本文將從梯度的數學定義出發,逐步引入經典的 Sobel 與 Laplacian 算子,帶你了解圖像梯度的計算原理與實踐方式。
1.1 什么是圖像梯度?
圖像梯度反映的是像素值(灰度或強度)在空間中的變化率。可以類比為地形圖中的“坡度”:哪里灰度變化劇烈,哪里就是圖像的“邊緣”。
對于二維灰度圖像I(x,y)I(x,y)I(x,y),梯度定義為圖像對空間坐標的偏導數組成的向量:
?I=[?I?x,?I?y]
\nabla I = \left[ \frac{\partial I}{\partial x}, \frac{\partial I}{\partial y} \right]
?I=[?x?I?,?y?I?]
- ?I?x\frac{\partial I}{\partial x}?x?I?:表示圖像在水平方向(x軸)上的變化率;
- ?I?y\frac{\partial I}{\partial y}?y?I?:表示圖像在垂直方向(y軸)上的變化率。
該向量的模長表示梯度的強度,方向表示灰度變化最劇烈的方向。
1.2 如何計算梯度
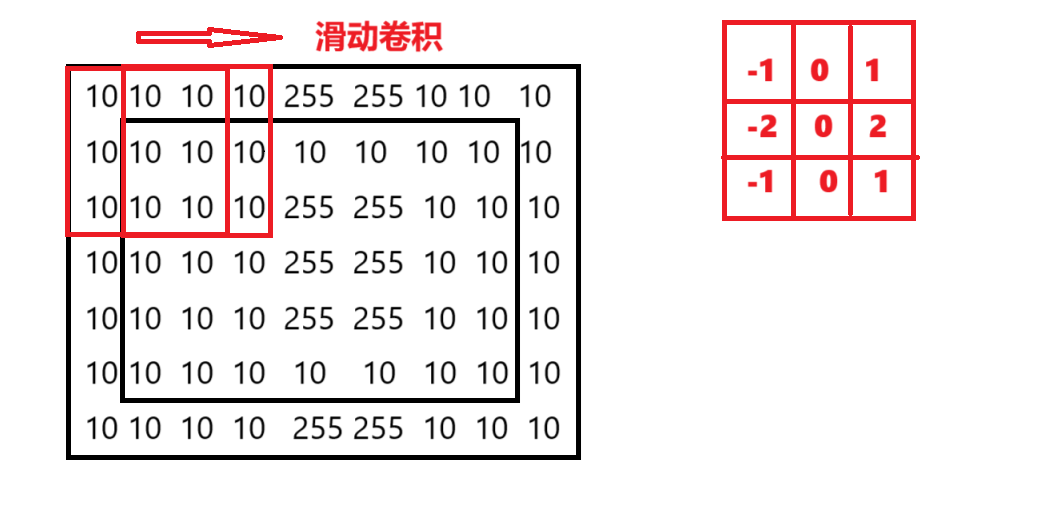
由于圖像是離散的,我們不能直接求導,而是通過離散卷積實現近似求導
使用cv2.filter2D自定義卷積核
OpenCV中filter2D可以對圖形施加自定義的卷積核,是實現梯度算子的基礎方法
語法如下所示:
dst = cv2.filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
filter2D函數是用于對圖像進行二維卷積(濾波)操作。它允許用戶自定義卷積核(kernal)來實現各種圖像處理效果,如平滑,銳化,邊緣檢測。
參數解析:
| 參數名 | 類型 | 說明 |
|---|---|---|
src | ndarray | 輸入圖像,必須是單通道或多通道(如灰度圖或彩色圖) |
ddepth | int | 輸出圖像的深度(如 cv2.CV_64F, -1 表示與原圖相同) |
kernel | ndarray | 卷積核(濾波器),必須是浮點型 np.float32 或 np.float64 |
dst | ndarray | (可選)輸出圖像,與 src 同大小 |
anchor | tuple | 卷積核錨點,默認 (-1, -1) 表示核中心 |
delta | float | 可選偏移值,加到卷積結果上 |
borderType | int | 邊界填充方式,常見如 cv2.BORDER_DEFAULT(邊界反射_101), cv2.BORDER_REPLICATE |
import cv2 as cv
import numpy as np# 構造圖像:中心有明顯亮度突變
img = np.array([[10, 10, 10, 10, 10, 10, 10],[10, 10, 10, 255, 255, 10, 10],[10, 10, 10, 255, 255, 10, 10],[10, 10, 10, 255, 255, 10, 10],[10, 10, 10, 10, 10, 10, 10]
], dtype=np.uint8)# 使用 Sobel 水平方向邊緣檢測核
kernel = np.array([[-1, 0, 1],[-2, 0, 2],[-1, 0, 1]], dtype=np.float32)# 卷積
img2 = cv.filter2D(img, -1, kernel)print(img2)
結果展示:
[[ 0 0 255 255 0 0 0][ 0 0 255 255 0 0 0][ 0 0 255 255 0 0 0][ 0 0 255 255 0 0 0][ 0 0 255 255 0 0 0]]
1.3 常見的梯度算子
1?? Sobel 算子(Sobel Operator)
Sobel 是最常見的梯度算子之一,結合了高斯平滑與微分運算,對噪聲更魯棒。
- 水平方向梯度核:
Gx=[?101?202?101] Gx=\begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{bmatrix} Gx=??1?2?1?000?121??
- 垂直方向梯度核:
Gy=[?1?2?1000121] G_y = \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \end{bmatrix} Gy?=??101??202??101??
在 OpenCV 中的實現:
語法說明:
dst = cv2.Sobel(src, ddepth, dx, dy, ksize=3, scale=1, delta=0, borderType=cv2.BORDER_DEFAULT)
| 參數名 | 類型 | 說明 |
|---|---|---|
src | ndarray | 輸入圖像(通常為灰度圖) |
ddepth | int | 輸出圖像的數據深度(OpenCV 中,-1 表示輸出圖像的深度與輸入圖像相同。) |
dx | int | x 方向求導階數(1 表示對 x 求一階導),獲取的垂直邊緣 |
dy | int | y 方向求導階數,獲取的水平邊緣 |
ksize | int | Sobel 核大小(可為 1, 3, 5, 7,常用 3) |
scale | float | 可選縮放因子,對導數結果進行縮放(一般為 1) |
delta | float | 可選偏移量,結果加上 delta(一般為 0) |
borderType | int | 邊界填充方式,默認 cv2.BORDER_DEFAULT |
示例代碼:Sobel算子的使用
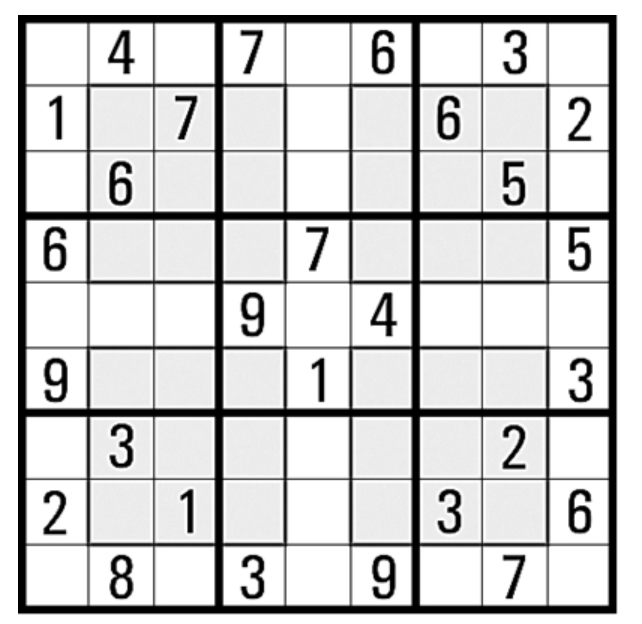
# sobel算子import cv2 as cvshudu = cv.imread('../images/shudu.png', cv.IMREAD_GRAYSCALE)# x方向
dst_x = cv.Sobel(shudu, -1, 1, 0, ksize=3)# y方向
dst_y = cv.Sobel(shudu, -1, 0, 1, ksize=3)# x和y方向
dst_xy = cv.Sobel(shudu, -1, 1, 1, ksize=3)cv.imshow('shudu', shudu)
cv.imshow('dst_x', dst_x)
cv.imshow('dst_y', dst_y)
cv.imshow('dst_xy', dst_xy)
cv.waitKey(0)
cv.destroyAllWindows()
結果輸出:
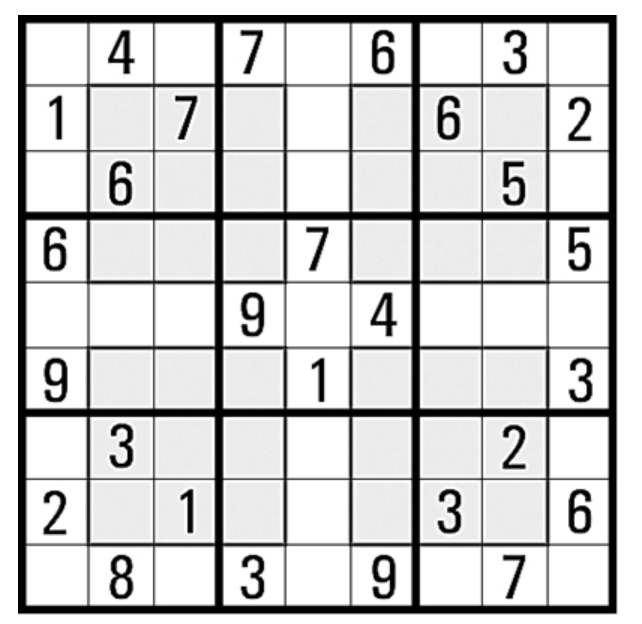 | 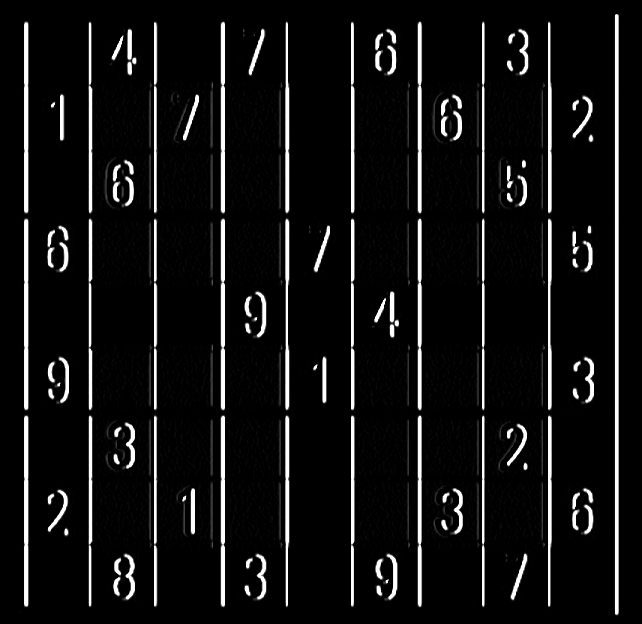 | 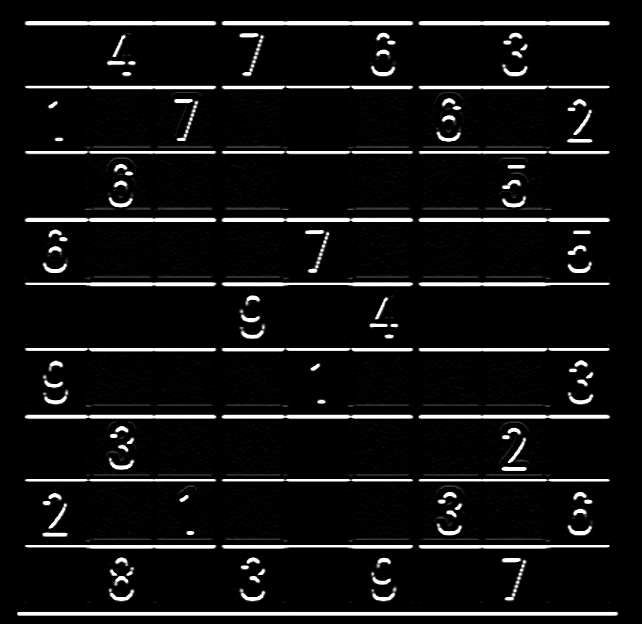 | 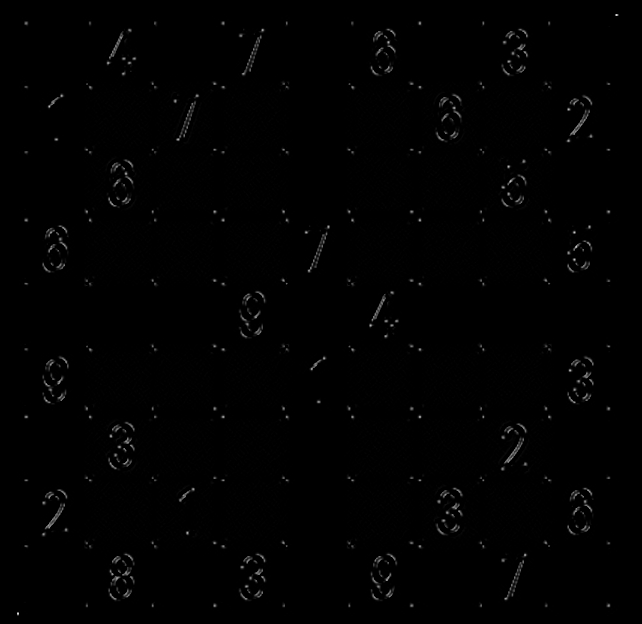 |
|---|---|---|---|
| 灰度圖 | dx=1,dy=0(獲取垂直邊緣) | dx=0,dy=1(獲取水平邊緣) | dx=1,dy=1(不建議使用),用Laplacian來獲取水平垂直邊緣。 |
dx,dy可以都為1,獲取的垂直和水平方向上的梯度。dx,dy不能都為0。
grad_x: 圖像在 x 方向的梯度(橫向變化)grad_y: 圖像在 y 方向的梯度(縱向變化)
我們可以將它們組成一個向量:
G?=(grad_x,?grad_y)
\vec{G} = (grad\_x, \, grad\_y)
G=(grad_x,grad_y)
然后,使用勾股定理計算這個向量的長度(也就是梯度強度):
magnitude=grad_x2+grad_y2
\text{magnitude} = \sqrt{grad\_x^2 + grad\_y^2}
magnitude=grad_x2+grad_y2?
2?? Laplacian 算子(Laplacian Operator)
一、什么是 Laplacian 算子?
Laplacian(拉普拉斯算子)是二階微分算子,用于度量函數在某點處的“變化率的變化”,即函數曲率。
在圖像處理中,它能檢測圖像中灰度變化最顯著的地方——邊緣,尤其是亮度快速變化的區域,對噪聲也很敏感。
數學定義如下:
Δf=?2f?x2+?2f?y2
\Delta f = \frac{\partial^2 f}{\partial x^2} + \frac{\partial^2 f}{\partial y^2}
Δf=?x2?2f?+?y2?2f?
🧮 二、從一維差分到二維卷積核
1. 一維差分
一階差分(梯度近似):
f′(x)≈f(x+1)?f(x)
f'(x) \approx f(x+1) - f(x)
f′(x)≈f(x+1)?f(x)
二階差分(Laplacian 近似):
f′′(x)≈f(x+1)+f(x?1)?2f(x)
f''(x) \approx f(x+1) + f(x-1) - 2f(x)
f′′(x)≈f(x+1)+f(x?1)?2f(x)
對應的卷積核(差分模板)為:
k=[1,?2,1]
k=[1,?2,1]
k=[1,?2,1]
2. 推導二維 Laplacian 卷積核
對于二維函數 f(x,y)f(x,y)f(x,y):
水平方向二階導數:
?2f?x2≈f(x+1,y)+f(x?1,y)?2f(x,y)
\frac{\partial^2 f}{\partial x^2} \approx f(x+1, y) + f(x-1, y) - 2f(x, y)
?x2?2f?≈f(x+1,y)+f(x?1,y)?2f(x,y)
垂直方向二階導數:
?2f?y2≈f(x,y+1)+f(x,y?1)?2f(x,y)
\frac{\partial^2 f}{\partial y^2} \approx f(x, y+1) + f(x, y-1) - 2f(x, y)
?y2?2f?≈f(x,y+1)+f(x,y?1)?2f(x,y)
將它們相加:
Δf(x,y)≈f(x+1,y)+f(x?1,y)+f(x,y+1)+f(x,y?1)?4f(x,y)
\Delta f(x, y) \approx f(x+1, y) + f(x-1, y) + f(x, y+1) + f(x, y-1) - 4f(x, y)
Δf(x,y)≈f(x+1,y)+f(x?1,y)+f(x,y+1)+f(x,y?1)?4f(x,y)
這就是最常見的 4 鄰域 Laplacian 模板:
k=[0101?41010]
k = \begin{bmatrix} 0 & 1 & 0 \\ 1 & -4 & 1 \\ 0 & 1 & 0 \end{bmatrix}
k=?010?1?41?010??
3. 加上對角(斜對角)項:8 鄰域
如果你想讓算子對角方向也敏感,可以擴展為:
k=[1111?81111]
k = \begin{bmatrix} 1 & 1 & 1 \\ 1 & -8 & 1 \\ 1 & 1 & 1 \end{bmatrix}
k=?111?1?81?111??
這種核能更廣泛捕捉到不同方向的邊緣,但也更敏感。
OpenCV 使用方式:
cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
| 參數 | 含義 |
|---|---|
src | 輸入圖像,必須是灰度圖 |
ddepth | 輸出圖像的深度,常用 cv2.CV_64F,避免溢出 |
ksize | 卷積核大小,必須是奇數,一般設為 1 表示使用標準核(上面那個) |
scale | 縮放梯度值,默認 1 |
delta | 可選的偏移值,默認 0 |
borderType | 邊緣填充方式,默認 cv2.BORDER_DEFAULT |
與 Sobel 不同,Laplacian 不區分方向,輸出的是一種方向無關的邊緣響應。
示例代碼
# Laplacian算子
import cv2 as cvshudu = cv.imread('../images/shudu.png', cv.IMREAD_GRAYSCALE)# Laplacian算子
dst = cv.Laplacian(shudu, -1, ksize=1)
cv.imshow('shudu', shudu)
cv.imshow('dst', dst)
cv.waitKey(0)
cv.destroyAllWindows()
 | 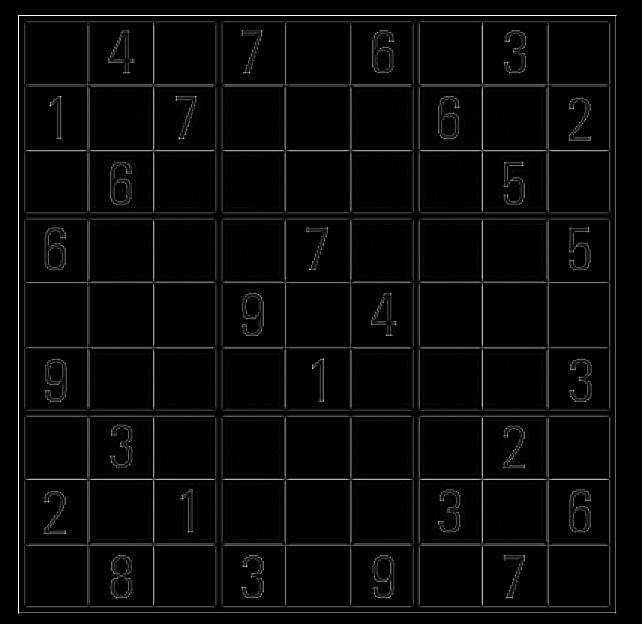 |
|---|---|
| 灰度圖 | Laplacian算子 |
二、圖像邊緣檢測
2.1. 什么是圖像邊緣?
從數學角度來看,圖像邊緣是圖像灰度函數的一階導數(梯度)取得極大值的位置,或二階導數(Laplacian)為零的地方。
我們把二維圖像 f(x,y)f(x,y)f(x,y) 看作一個連續函數,圖像的變化速率(即灰度變化)就是它的梯度:
?f=(?f?x,?f?y)
\nabla f = \left( \frac{\partial f}{\partial x}, \frac{\partial f}{\partial y} \right)
?f=(?x?f?,?y?f?)
梯度的模長即為邊緣強度:
∣?f∣=(?f?x)2+(?f?y)2
|\nabla f| = \sqrt{ \left( \frac{\partial f}{\partial x} \right)^2 + \left( \frac{\partial f}{\partial y} \right)^2 }
∣?f∣=(?x?f?)2+(?y?f?)2?
2. 2. 邊緣檢測的整體流程圖
2. 3. 高斯濾波去噪
邊緣檢測屬于一種“銳化”操作,容易放大噪聲。為此,第一步通常使用高斯濾波對圖像進行平滑處理,消除小范圍內的噪點干擾:
blur = cv2.GaussianBlur(img, (5, 5), 1.4)
高斯核示例(5x5):
1273[1474141626164726412674162616414741]
\frac{1}{273} \begin{bmatrix} 1 & 4 & 7 & 4 & 1\\ 4 & 16 & 26 & 16 & 4\\ 7 & 26 & 41 & 26 & 7\\ 4 & 16 & 26 & 16 & 4\\ 1 & 4 & 7 & 4 & 1 \end{bmatrix}
2731??14741?41626164?72641267?41626164?14741??
2.4. Sobel算子計算梯度與方向
📌 Sobel 卷積核
用于計算圖像在水平與垂直方向上的一階導數:
- 水平(x方向):
Gx=[?101?202?101] G_x = \begin{bmatrix} -1 & 0 & 1\\ -2 & 0 & 2\\ -1 & 0 & 1 \end{bmatrix} Gx?=??1?2?1?000?121??
- 垂直(y方向):
Gy=[?1?2?1000121] G_y = \begin{bmatrix} -1 & -2 & -1\\ 0 & 0 & 0\\ 1 & 2 & 1 \end{bmatrix} Gy?=??101??202??101??
梯度值與方向
grad_x = cv2.Sobel(blur, cv2.CV_64F, 1, 0)
grad_y = cv2.Sobel(blur, cv2.CV_64F, 0, 1)
magnitude = cv2.magnitude(grad_x, grad_y)
angle = cv2.phase(grad_x, grad_y, angleInDegrees=True)
- 梯度幅值(強度):
G=Gx2+Gy2 G = \sqrt{G_x^2 + G_y^2} G=Gx2?+Gy2??
- 梯度方向:
θ=arctan?(GyGx) \theta = \arctan\left( \frac{G_y}{G_x} \right) θ=arctan(Gx?Gy??)
2.5. 非極大值抑制(NMS)
目的:只保留梯度方向上的局部極大值點,細化邊緣線條。
步驟如下:
- 對于每一個像素,查找其在梯度方向上的鄰接像素。
- 如果當前像素的梯度值不是三者中最大的,就將其抑制為0。
為了比較非整數方向上的像素值,需要使用線性插值。
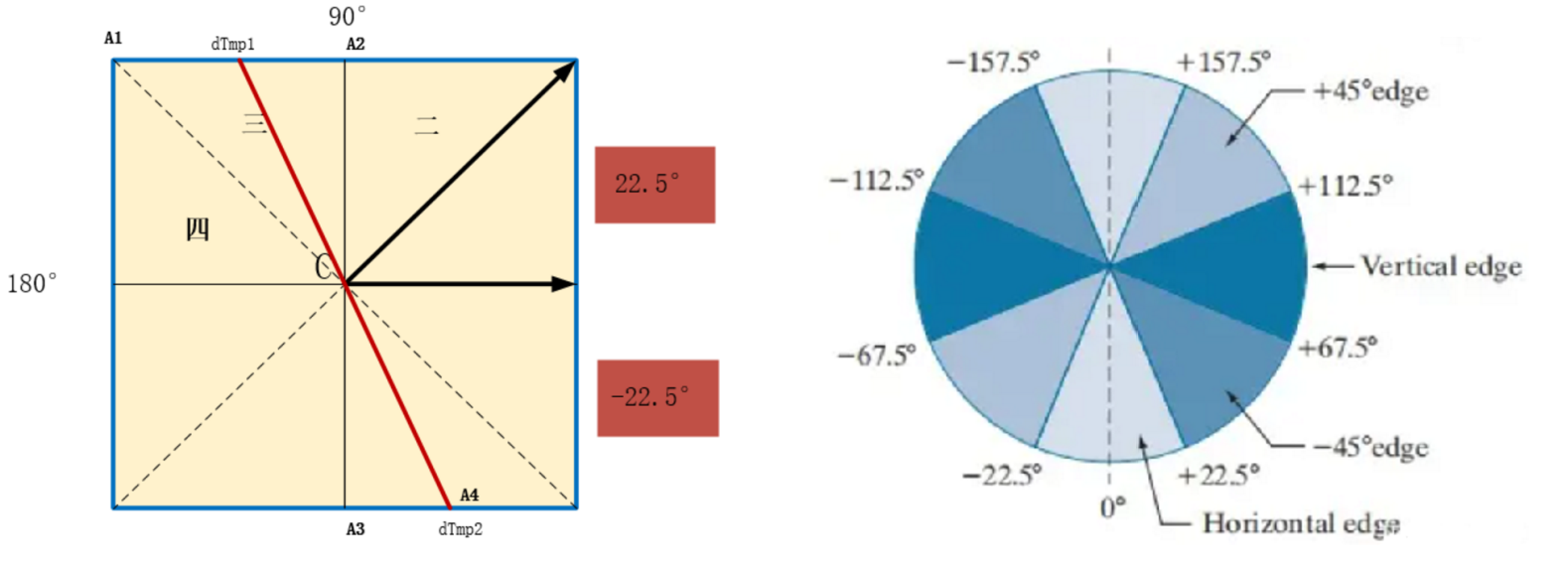
得到θ\thetaθ的值之后,就可以對邊緣方向進行分類,為了簡化計算過程,一般將其歸為四個方向:水平方向、垂直方向、45°方向、135°方向。并且:
當θ\thetaθ值為-22.5°~22.5°,或-157.5°~157.5°,則認為邊緣為水平邊緣;
當法線方向為22.5°~67.5°,或-112.5°~-157.5°,則認為邊緣為45°邊緣;
當法線方向為67.5°~112.5°,或-67.5°~-112.5°,則認為邊緣為垂直邊緣;
當法線方向為112.5°~157.5°,或-22.5°~-67.5°,則認為邊緣為135°邊緣;
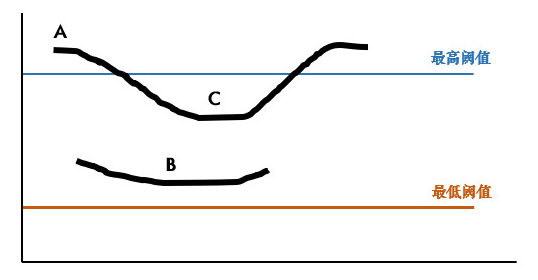
2.6. 雙閾值連接(Hysteresis)
非極大值抑制后,圖像中仍有很多邊緣片段。通過設定高低兩個閾值,連接可靠的邊緣:
- 高于高閾值 → 強邊緣(保留)
- 低于低閾值 → 弱邊緣(舍棄)
- 介于之間 → 如果與強邊緣連接,則保留;否則丟棄
推薦設置
edges = cv2.Canny(img, threshold1=50, threshold2=150)
閾值比建議控制在 2:1 到 3:1 之間。
2.7. Canny 算子:全流程封裝
OpenCV 內置的 Canny 算子封裝了所有步驟:
edges = cv2.Canny(image, 50, 150)
參數說明:
image: 輸入灰度/二值化圖像threshold1: 低閾值,用于決定可能的邊緣點。threshold2: 高閾值,用于決定強邊緣點。
2.8. 總結
| 步驟 | 作用 | 工具/算子 |
|---|---|---|
| 高斯濾波 | 平滑圖像,去除噪聲 | cv2.GaussianBlur |
| 梯度計算 | 提取邊緣強度與方向 | cv2.Sobel |
| 非極大值抑制 | 邊緣細化 | 自定義插值 |
| 雙閾值鏈接 | 連接可靠邊緣,抑制偽邊緣 | cv2.Canny |
三、圖像輪廓提取與繪制
圖像輪廓是計算機視覺中一個非常關鍵的概念,它廣泛應用于目標檢測、圖像分割、形狀分析等領域。
3.1 什么是輪廓(Contours)
輪廓是將具有相同灰度值的像素點連接成線的過程。在圖像中,輪廓通常用于表示物體的邊界或形狀。
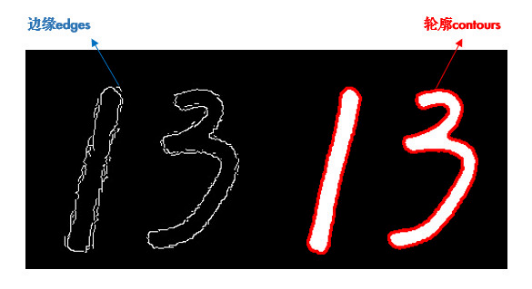
? 輪廓與邊緣的區別:
- 邊緣是強度變化的位置(如 Canny)
- 輪廓是封閉的路徑,更強調形狀和結構
- 邊緣可能是離散點,輪廓是連續曲線
示意圖:
3.2 尋找輪廓的流程
輪廓提取的流程通常如下:
graph TD
A[彩色圖像] --> B[灰度化]
B --> C[二值化]
C --> D[查找輪廓 \n cv2.findContours()]
3.3 OpenCV 提供了非常方便的函數:
contours, hierarchy = cv2.findContours(image, mode, method)
3.3.1 參數說明:
| 參數 | 說明 |
|---|---|
image | 輸入圖像,必須是二值圖像 |
mode | 輪廓檢索模式(如下表) |
method | 輪廓逼近方法(如下表) |
contours | 返回的輪廓點坐標數組列表 |
hierarchy | 返回輪廓間的層級結構 |
3.3.2 mode 參數解釋(輪廓層次結構)
| mode 值 | 含義 |
|---|---|
RETR_EXTERNAL | 只提取最外層輪廓(最常用) |
RETR_LIST | 提取所有輪廓,但不構建父子關系 |
RETR_CCOMP | 提取所有輪廓,并將外層和內層分層保存 |
RETR_TREE | 提取所有輪廓并構建完整層次樹結構 |
層次結構說明圖(RETR_TREE):
hierarchy[i] = [next, previous, child, parent]
3.3.3 method 參數解釋(輪廓點存儲方式)
| method 值 | 含義 |
|---|---|
CHAIN_APPROX_NONE | 保存所有邊界點 |
CHAIN_APPROX_SIMPLE | 壓縮冗余點,只保留關鍵點(如直線只保留端點) |
CHAIN_APPROX_TC89_L1 | 使用 Teh-Chin 鏈碼逼近算法,效率更高(較少使用) |
3.4 繪制輪廓
查找到輪廓后,可以使用以下函數將輪廓畫出來:
cv2.drawContours(image, contours, contourIdx, color, thickness)
參數說明:
| 參數名 | 含義 |
|---|---|
image | 輸入/輸出圖像(會被修改) |
contours | 找到的輪廓點數組 |
contourIdx | 要繪制的輪廓索引(-1 表示繪制所有) |
color | 輪廓線顏色(BGR) |
thickness | 線條粗細,負值表示填充區域 |
3.5 實戰代碼示例:
import cv2 as cv
from socks import PRINTABLE_PROXY_TYPES# 讀取圖像
img = cv.imread('../images/num.png')# 轉換為灰度圖像
img_gray =cv.cvtColor(img,cv.COLOR_BGR2GRAY)#二值化
_,img_binary = cv.threshold(img_gray,127,255,cv.THRESH_BINARY_INV)# 尋找輪廓
counters,hierarchy = cv.findContours(img_binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)print(counters)
print(len(counters))
print('-------')
print(hierarchy)# 繪制輪廓
cv.drawContours(img,counters,-1,(0,255,0),3,cv.LINE_AA)
cv.imshow('img',img)
cv.waitKey(0)
cv.destroyAllWindows()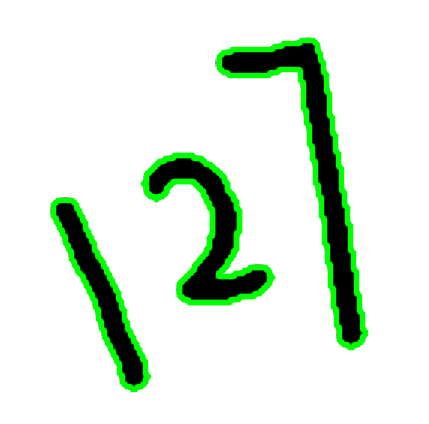
3.6 小貼士:輪廓查找注意事項
- 🔸 輸入圖像必須為二值圖像(黑白),推薦使用
cv2.threshold()。 - 🔸 可以先做邊緣檢測(如
Canny),再輪廓提取。 - 🔸
cv2.findContours()會修改原圖像,最好用拷貝版本。 - 🔸
drawContours()可以搭配boundingRect()、minAreaRect()等函數做目標框選。
3.7總結
| 步驟 | 內容 |
|---|---|
| 1?? | 灰度化原圖 |
| 2?? | 二值化處理 |
| 3?? | 使用 cv2.findContours 提取輪廓 |
| 4?? | 使用 cv2.drawContours 繪制輪廓 |
| 5?? | 可結合形狀分析、ROI 提取等進一步處理 |
四、繪制凸包
我們已經知道了如何獲取輪廓點(contours)以及如何通過 cv2.convexHull() 得到 凸包點集。接下來,我們通過繪圖的方式將凸包顯示出來。
4.1 算法特點
在計算幾何中,**窮舉法(Brute Force)和 QuickHull是兩種常見的凸包(Convex Hull)**構造算法,它們各有優缺點,適用于不同場景。下面為你簡要整理兩者特點,并通過表格進行對比:
1. 窮舉法(Brute Force)
原理:
遍歷所有點對,判斷這條邊是否是凸包邊:即判斷所有其他點是否都在該邊的同一側。若是,則保留該邊。
特點:
- 算法思想簡單直觀;
- 時間復雜度較高:O(n3)O(n^3)O(n3);
- 適合教學/小規模數據集;
- 實現容易理解,但不適合大數據場景。
2. QuickHull 算法
原理:
類似快速排序的分治思想。先找出最左和最右的兩個點作為“線段”,劃分上下兩部分遞歸尋找最外層點,逐步構造出凸包。
特點:
- 平均性能優良,時間復雜度大約為 O(nlog?n)O(n \log n)O(nlogn);
- 適合中大型數據;
- 實現相對復雜,但效率更高;
- 對輸入數據分布較敏感(最壞 O(n2)O(n^2)O(n2))。
函數一覽
| 函數 | 功能 |
|---|---|
cv2.findContours() | 獲取輪廓點 |
cv2.convexHull() | 根據輪廓點獲取凸包點 |
cv2.polylines() | 根據點集繪制折線(或閉合多邊形) |
# 獲取凸包點
import cv2 as cv# 讀取圖像
image_tu = cv.imread('../images/tu.png')# 轉換為灰度圖像
image_gray = cv.cvtColor(image_tu, cv.COLOR_BGR2GRAY)# 二值化處理
_,image_binary = cv.threshold(image_gray,127,255,cv.THRESH_BINARY)# 尋找輪廓
counters,_ = cv.findContours(image_binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)# 獲取凸包
convex_hull= []
for cnt in counters:convex_hull.append(cv.convexHull(cnt))cv.polylines(image_tu,convex_hull,True,(255,0,0),3,cv.LINE_AA)
cv.imshow('binary',image_binary)
cv.imshow('tu',image_tu)
cv.waitKey(0)
cv.destroyAllWindows()
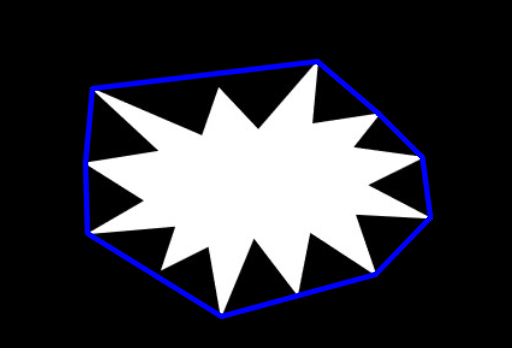
4.4 結果效果
假設你的原始圖像中有一個不規則物體,該代碼會:
- 提取其輪廓
- 計算包住這個物體的最小凸多邊形(凸包)
- 用線條將這個凸包標出
如圖所示:
4.5 應用場景總結
| 應用領域 | 使用場景 |
|---|---|
| 手勢識別 | 識別手指個數:凸包與缺陷分析(defects) |
| 目標檢測 | 將不規則輪廓轉為規則包圍多邊形 |
| 圖像壓縮 | 簡化輪廓特征 |
| 安全區域 | 包圍任意散點區域 |
)
IO流:數據洪流中的航道設計)

)
)


)


順序表算法題)







異常:從底層原理到架構級防御,老司機的實戰經驗)
