### 智能設備暢想
突然想到了一個好主意
因為最近在查無人機的相關資料(很早之前就想搞個無人機玩玩但始終沒有買)
在了解自組裝方面的內容時,和AI溝通了下
正好之前組裝的?小智AI 基本上已經完善了,也正在考慮其在其他方向拓展的可能性(我認為是最好的底層 智能硬件設備,可以集成到各種設備當中)
同時AI在MCP協議這方面也已經有所完善了
既然如此為什么不能將 無人機 和 小智AI 結合呢
實現一個可以知道自己正在操作無人機,并且可以主動控制無人機完成一系列指定任務的智能設備呢?(不過在持續性操控方面始終沒法解決)因為LLM并不能主動輸出內容,必須 輸入——>輸出,因此我在考慮通過自己訓練一個持續性學習的策略型神經網絡。
(感覺自己的文學功底真不行,這是AI改的)
當前大模型(LLM)雖然具備強大的語言理解和任務分解能力,但它的結構決定了“輸入 → 輸出”的一次性推理模式,難以勝任需要持續狀態感知和動作輸出的任務控制場景,例如控制無人機持續追蹤一個目標。
為了解決這一問題,我打算采用一種輕量級的策略神經網絡結構。該網絡以實時狀態數據為輸入(例如目標位置、無人機電量、障礙物分布等),輸出一組動作概率(如上下左右移動方向),從而形成一種“持續反饋-響應”的閉環控制系統。
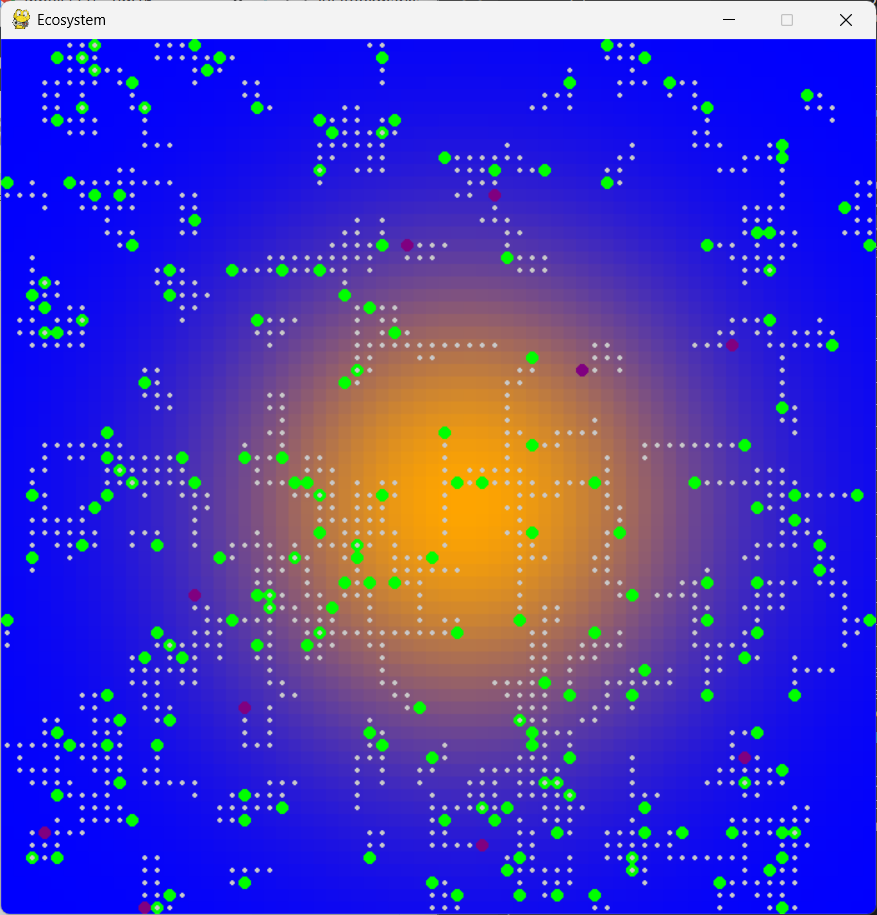
類似結構我曾用于一個模擬生態系統中,模型可以根據環境狀態持續控制捕食者行為,達到食物鏈穩定性。未來我希望將類似策略網絡與大模型結合,讓LLM決定“目標”,策略網絡負責“執行路徑”,實現“認知-執行”分離架構。
前段時間的時候通過AI實現的了一個策略型神經網絡的 模擬小型生態環境的模型(能夠實時訓練學習,包含捕食者、綠藻、陽光能力)
策略神經網絡也很簡單,就是輸入狀態信息,分別返回四個方向概率(上下左右)
文章鏈接:AI輔助實現的小型生態系統 | Tokepson的博客
總之就是我有這么一個構想,并且如果將這樣的設備覆蓋各種具有能動性的電子設備當中,整個城市都可以完全被智能覆蓋,智能車、智能無人機、智能人,通通都可以接入AI智能體,并且根據設備的不同,還能發揮出不同功效
根本壓抑不住情緒啊,感覺已經想象到未來的那一天了!(不過我似乎并沒有看到,AI在邏輯推理行為上有很大的進展,因此不會太快就是了)
還有一個就是,AI智能體在控制方面
很有可能會有一個中央平臺來控制和管理所有智能體,以及每個智能體是獨立的還是說統一中央智能體管理(就是說智能體的記憶等數據是存儲在本地,還是統一傳輸給中央的意思)
如果統一傳輸給中央,這個定位就非常類似“智腦”了
如果有智能體設備獨立存儲,嗯。。。(獨立設備里能否足夠配置獨立顯卡加速計算也是個問題)
總之,想要說明的就是這些,寫了這些,順便也把這幾天堆積的想法給記錄下






:軟件分類展示)






:時序數據庫介紹與單機版安裝部署指南)



)
 對偶(II)KKT條件+變形重構)
