引言
自動駕駛技術正經歷一場架構革命。傳統上,自動駕駛系統采用模塊化設計,將感知、預測和規劃分離為獨立組件。而上海人工智能實驗室的OpenDriveLab團隊提出的UniAD(Unified Autonomous Driving)則嘗試將這些任務整合到一個統一框架中。本文將從多角度審視UniAD,既探討其創新點,也分析落地應用面臨的實際挑戰。
1.理解"端到端"的真正含義
在自動駕駛語境中,"端到端"常指系統能直接從傳感器輸入到駕駛控制輸出建立映射。UniAD在這方面采取了折中方案:
- 傳統模塊化方法:各模塊嚴格分離,獨立優化,可能導致信息丟失和錯誤累積
- 純端到端方法:直接從傳感器數據映射到控制命令,缺乏可解釋性和安全保障
- UniAD方法:保留模塊化結構,但通過統一特征表示和共同訓練促進模塊間協作
值得注意的是,UniAD并非完全意義上的端到端系統。它仍然保留明確的中間表示和模塊劃分,更準確地說是一種"統一模塊化"設計。這種設計既追求端到端優化的性能提升,又保留模塊化的可解釋性。
2.?UniAD根本目的
UniAD(Unified Autonomous Driving)是一個端到端自動駕駛框架,旨在通過統一架構解決傳統模塊化系統存在的信息割裂和錯誤累積問題。其核心用途是:
將感知(檢測、追蹤、地圖構建)、預測(軌跡、占用)和規劃(路徑生成)三大任務整合到單一網絡中,通過協同優化提升自動駕駛系統的整體性能。
3.?UniAD具體功能實現
UniAD通過以下具體功能支撐自動駕駛決策:
-
動態環境建模
實時檢測并追蹤車輛、行人等動態物體(TrackFormer),同時構建在線高精地圖(MapFormer),在無預存地圖時仍能理解道路結構。
例:城市施工路段臨時改道時,仍能識別錐桶圍欄和新車道線。 -
多智能體交互預測
預測周圍車輛/行人未來5-8秒的多模態軌跡(MotionFormer),并生成未來場景的3D占用網格(OccFormer)。
例:預判前方車輛可能急剎或變道,提前規劃避讓路徑。 -
安全路徑規劃
綜合所有信息,生成符合車輛動力學、避開占用區域且遵守交規的駕駛路徑(Planner)。
例:在十字路口同時考慮對向左轉車輛、闖紅燈電動車和斑馬線行人,計算最優通行時機。
4.?典型應用場景
UniAD特別擅長處理傳統系統易失效的復雜場景:
| 場景類型 | UniAD解決方案 | 傳統系統痛點 |
|---|---|---|
| 密集車流變道 | 通過MotionFormer預測周圍車輛加速/讓行意圖,OccFormer識別安全變道空間 | 模塊化系統常因預測與規劃信息不同步導致猶豫或急剎 |
| 無保護左轉 | MapFormer在線識別無信號燈路口結構,Planner結合行人/對向車流預測生成博弈式軌跡 | 依賴規則引擎的系統易陷入"鬼探頭"困境 |
| 施工路段通行 | TrackFormer持續追蹤移動的錐桶和工程車,MapFormer實時更新可行駛區域 | 基于預存地圖的系統可能誤判封閉車道 |
| 夜間低能見度 | BEV特征融合多攝像頭數據增強感知,OccFormer通過運動模式補全遮擋區域 | 純激光雷達方案在雨霧中性能下降顯著 |
5.UniAD的核心架構
UniAD采用"規劃導向"的設計理念,其架構包含五個主要模塊:
- TrackFormer:執行檢測和多目標追蹤,使用軌跡查詢從BEV(鳥瞰圖)特征中獲取場景信息。
- MapFormer:負責在線地圖構建,將道路元素表示為地圖查詢,執行全景分割任務。
- MotionFormer:捕獲場景中多個代理的交互關系,預測每個代理的未來軌跡。
- OccFormer:預測多步未來占用情況,并保留代理身份信息。
- Planner:利用前面模塊的信息生成最終規劃路徑,基于牛頓法優化軌跡以避免碰撞。
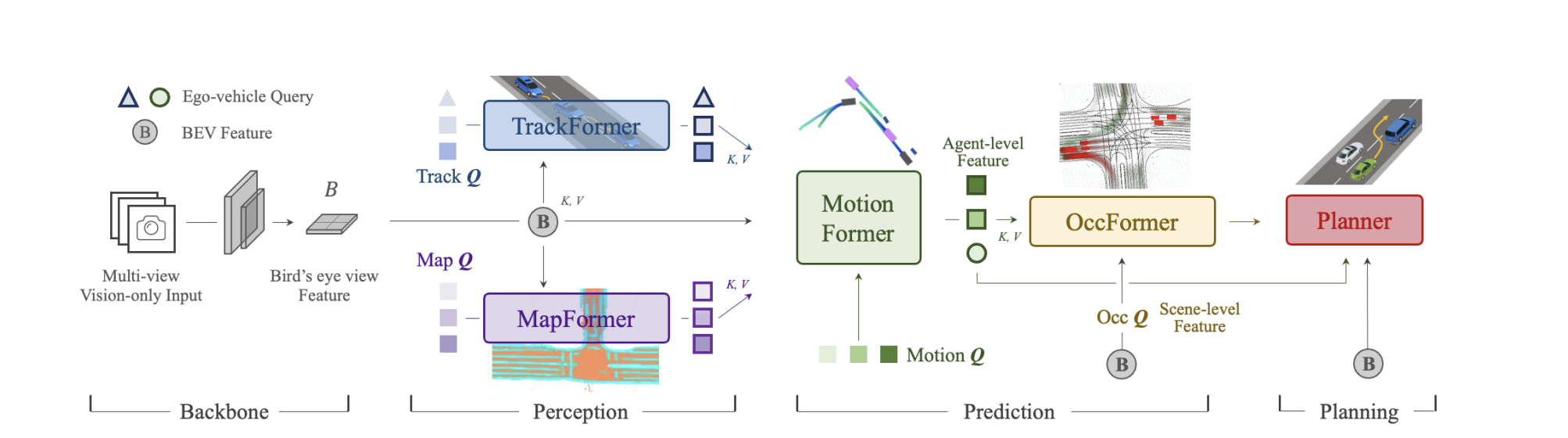
工作流程上,系統從多相機圖像開始,通過BEVFormer轉換為統一的鳥瞰圖特征,然后依次通過各模塊處理,最終生成行駛路徑。
6.UniAD的優勢與創新
6.1 技術創新點
- 查詢機制:使用查詢作為模塊間接口,使系統能夠靈活建模多個代理間的交互
- 非線性優化:在運動預測和規劃模塊采用優化策略,使軌跡符合物理可行性
- 像素-代理交互:在占用預測中設計了融合場景級和代理級理解的機制
6.2?理論上的應用優勢
- 信息共享:各模塊共享底層特征表示,減少信息損失
- 聯合優化:整個系統端到端訓練,所有模塊協同優化
- 可解釋性:保留明確中間表示,比純黑盒端到端系統更可解釋
7.實際落地面臨的挑戰
然而,從學術創新到工業應用,UniAD面臨諸多現實挑戰:
7.1 計算資源與成本
UniAD基于多個Transformer模塊,計算需求相當可觀:
- 可能需要高端計算平臺,成本和功耗顯著高于當前量產方案
- 對車載散熱系統提出嚴苛要求
- 在算力優化和成本控制方面面臨挑戰
7.2 安全驗證
傳統模塊化系統可通過ISO 26262等標準對各模塊獨立認證,而UniAD這樣的統一系統面臨更復雜的安全驗證挑戰:
- 聯合訓練機制可能導致系統行為難以預測
- 傳統形式化驗證方法可能無法應用
- 安全冗余設計需要重新思考
7.3 實驗室性能與實際表現的差距
雖然UniAD在nuScenes基準測試中表現優異,但基準測試與實際道路環境存在顯著差異:
- nuScenes數據集可能未充分覆蓋極端天氣、復雜交通規則等場景
- 標注質量和數據集偏差可能影響實際性能
- 長尾場景(如兒童突然闖入、非常規車輛)的處理能力有待驗證
7.4 倫理決策與復雜交互
自動駕駛系統需要處理復雜的道德和倫理判斷,這些問題在UniAD中尚未得到明確解決:
- 不可避免的碰撞情況下如何做出倫理決策
- 如何理解和適應各地區不同的駕駛文化和習慣
- 與人類駕駛員的交互和溝通機制
8. 與其他自動駕駛方案的比較
將UniAD與業界其他方案對比:
| 方案 | 架構特點 | 優勢 | 劣勢 |
|---|---|---|---|
| UniAD | 統一模塊化 | 模塊協同優化,減少信息損失 | 計算需求高,安全驗證復雜 |
| 傳統模塊化 (Waymo) | 嚴格模塊分離 | 安全驗證成熟,失效模式明確 | 模塊間信息傳遞可能有損失 |
| 純視覺端到端 (Tesla) | 直接從視覺到控制 | 硬件需求較低,數據驅動 | 可解釋性低,需海量數據 |
| 基于HD地圖 (Mobileye) | 依賴高精度地圖 | 定位精確,規劃可靠 | 對地圖依賴高,更新維護成本大 |
9. 未來發展方向
UniAD為自動駕駛架構帶來了新思路,未來可能的發展方向包括:
- 計算優化:開發更高效算法和專用硬件,降低系統資源需求
- 安全框架:構建適合統一架構的安全驗證方法和標準
- 數據多樣性:擴展訓練數據集,覆蓋更多長尾場景和地區特性
- 可配置統一:設計在不同算力平臺上可自適應調整的靈活架構
10. 結論
UniAD代表了自動駕駛架構設計的一次重要嘗試,它打破了傳統模塊化系統的邊界,探索了更緊密集成的可能性。從學術角度看,UniAD在nuScenes等基準測試上的出色表現證明了這種方法的潛力。
然而,從工程實現角度來看,UniAD距離量產應用仍有相當距離。計算需求、安全驗證、實際道路適應性等問題都需要解決。自動駕駛發展需要學術創新與工程現實的平衡,不應過分夸大任何單一方法的革命性。
未來的自動駕駛系統可能會借鑒UniAD的部分理念,同時保留傳統方法的工程實用性,形成更平衡的解決方案。作為研究人員和工程師,我們應該既欣賞UniAD等創新架構的理論價值,也務實地評估其在實際應用中的局限性。
自動駕駛的終極目標是安全、可靠、普惠的智能出行,這需要理論創新與工程實踐的共同努力。

)

)

)









【注意:安裝失敗,謹慎參考!】)



