實習一周了,參與了客觀拍攝和測試,復習一下nv工具
BLACK LEVEL(黑電平)
eg:
$ nv_ob 0 in_dir <input directory> out_name <ob file>
nv_ob 0 in_dir D:\study\nvraw\ob1 out_name D:\study\nvraw\my_outputs1\ob.cfg
LEN SHADING
1. lsv_v1
eg:
nv_lsc_v1 0 optical_black_file <ob_file> \
i1 <infile1> cct1 <cct> is_FL1 0 \
i2 <infile2> cct2 <cct> is_FL2 1 \
i3 <infile3> cct3 <cct> is_FL3 0 \
out_name <lsc_v1 file>
nv_lsc_v1 0 optical_black_file D:\study\nvraw\my_outputs1\ob.cfg i1 D:\study\nvraw\lsc\shading_A_hcg.nvraw cct1 2856 is_FL1 0 i2 D:\study\nvraw\lsc\shading_D65_hcg.nvraw cct2 6500 is_FL2 0 i3 D:\study\nvraw\lsc\shading_T_hcg.nvraw cct3 4000 is_FL3 0 out_name D:\study\nvraw\my_outputs1\lsc_v1.cfg
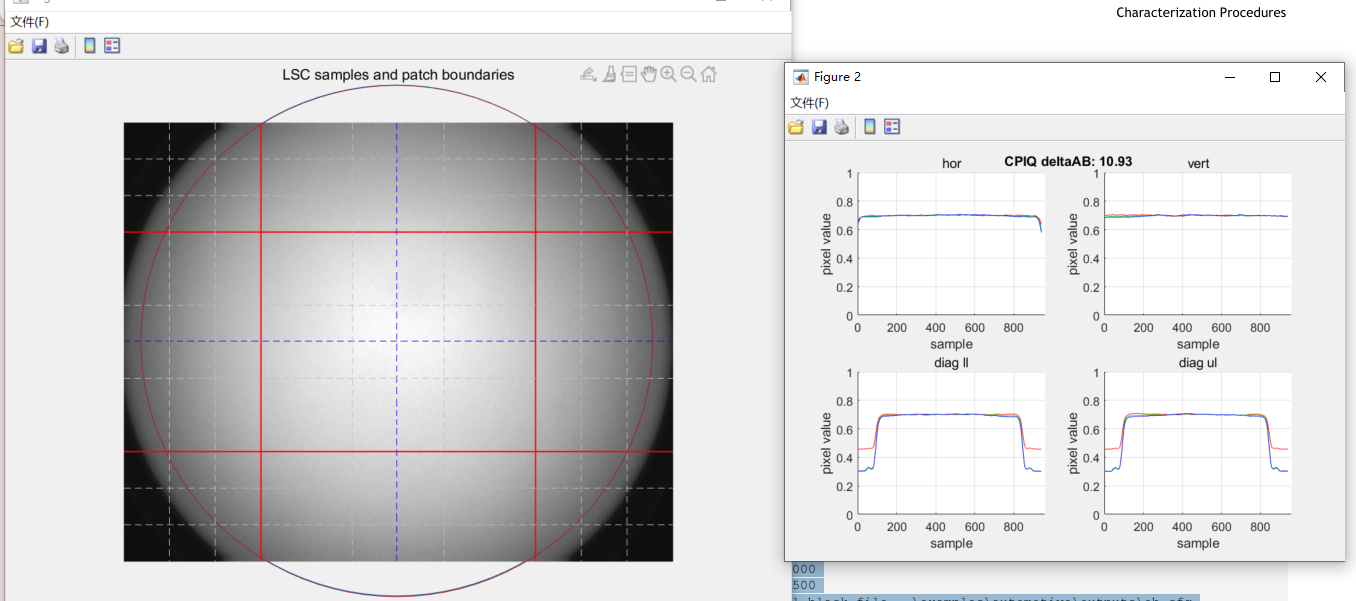
2. lsc_v2
eg:
C> nv_lsc_v2 0 i1 ..\examples\automotive\inputs\lsc_v2\AR0820_Flatfield_A.nvraw i2 ..\examples\automotive\inputs\lsc_v2\AR0820_Flatfield_TL84.nvraw i3 ..\examples\automotive\inputs\lsc_v2\AR0820_Flatfield_D65.nvraw cct1 2856 cct2 4000 cct3 6500 optical_black_file ..\examples\automotive\outputs\ob.cfg nito_file ..\TuningFiles\sample\sample.nito tuning_library ..\..\..\tuning\NITO_tools\windows lens_type fisheye circle_threshold 20 weight 0.8 falloff_factor 0.4
nv_lsc_v2 0 i1 D:\study\nvraw\lsc\shading_A_hcg.nvraw i2 D:\study\nvraw\lsc\shading_D65_hcg.nvraw i3 D:\study\nvraw\lsc\shading_T_hcg.nvraw cct1 2856 cct2 6500 cct3 4000 optical_black_file D:\study\nvraw\my_outputs1\ob.cfg nito_file D:\study\nvraw\OV-OX03H10-VCSEL-GMSL2-FUSA.nito tuning_library D:\study\nvraw\DRIVE_Camera_IQ_Toolkit_7.0.2.0_20250325\tuning\NITO_tools\windows lens_type fisheye circle_threshold 20 weight 0.8 falloff_factor 0.4 out_name D:\study\nvraw\my_outputs1\lsc_v2.cfg
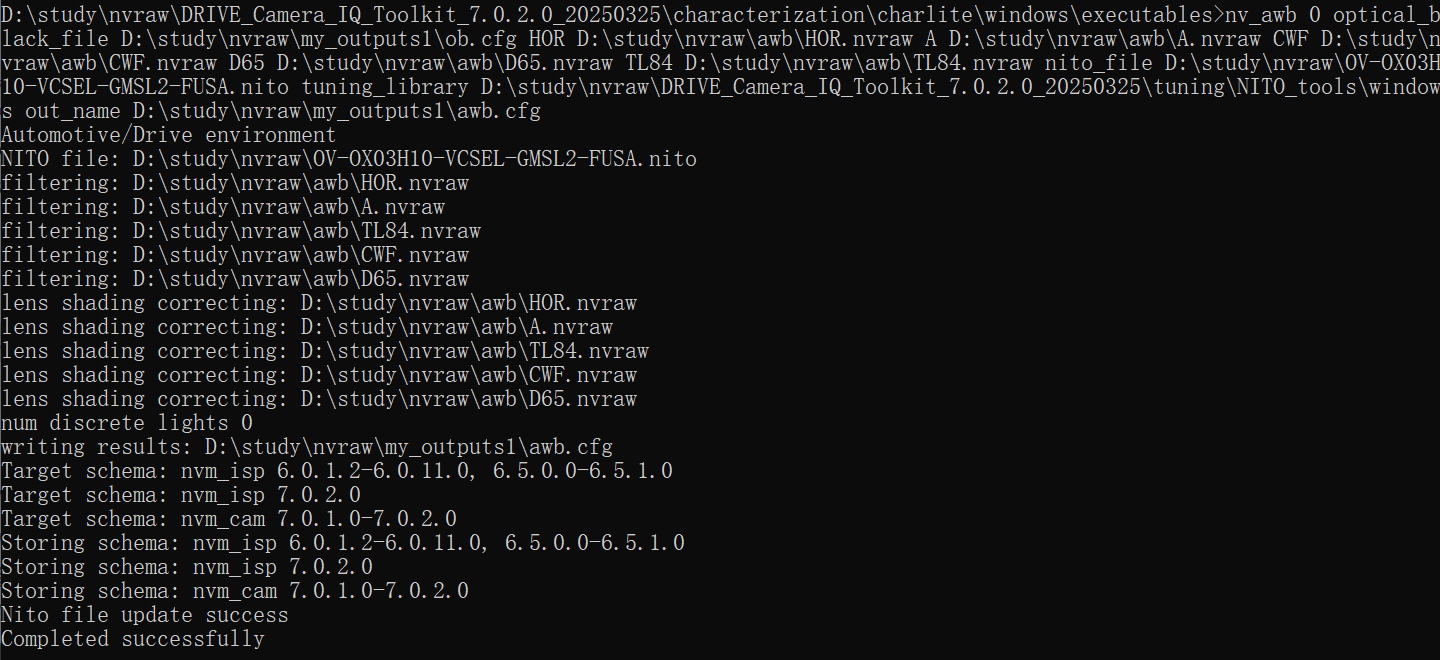
WHITE BALANCE
eg:
nv_awb 0 optical_black_file <ob file> HOR <HOR input file>
A <A input file> TL84 <TL84 input file> CWF <CWF input file>
D65 <D65 input file> out_name <awb file>
(這是Jstson device的腳本,下面是DRIVE device的腳本)
nv_awb 0 optical_black_file <ob file> HOR <HOR input file>
A <A input file> TL84 <TL84 input file> CWF <CWF input file>
D65 <D65 input file> out_name <awb file>
CC
eg:
$ nv_ccm 0 optical_black_file <ob file>
alpha <value>
chart1 <chart1 file> gray1 <gray 1 file>
chart2 <chart2 file> gray2 <gray 2 file>
chart3 <chart3 file> gray3 <gray 3 file>
out_name ..\outputs\ccm.cfg
nv_ccm 0 optical_black_file D:\study\nvraw\my_outputs1\ob.cfg alpha 1.00 chart1 D:\study\nvraw\mcc\CC_A.nvraw gray1 D:\study\nvraw\mcc\CC_gary_A.nvraw chart2 D:\study\nvraw\mcc\CC_D65.nvraw gray2 D:\study\nvraw\mcc\CC_gary_D65.nvraw chart3 D:\study\nvraw\mcc\CC_TL84.nvraw gray3 D:\study\nvraw\mcc\CC_gary_TL84.nvraw out_name D:\study\nvraw\my_outputs1\ccm.cfg
這里會生成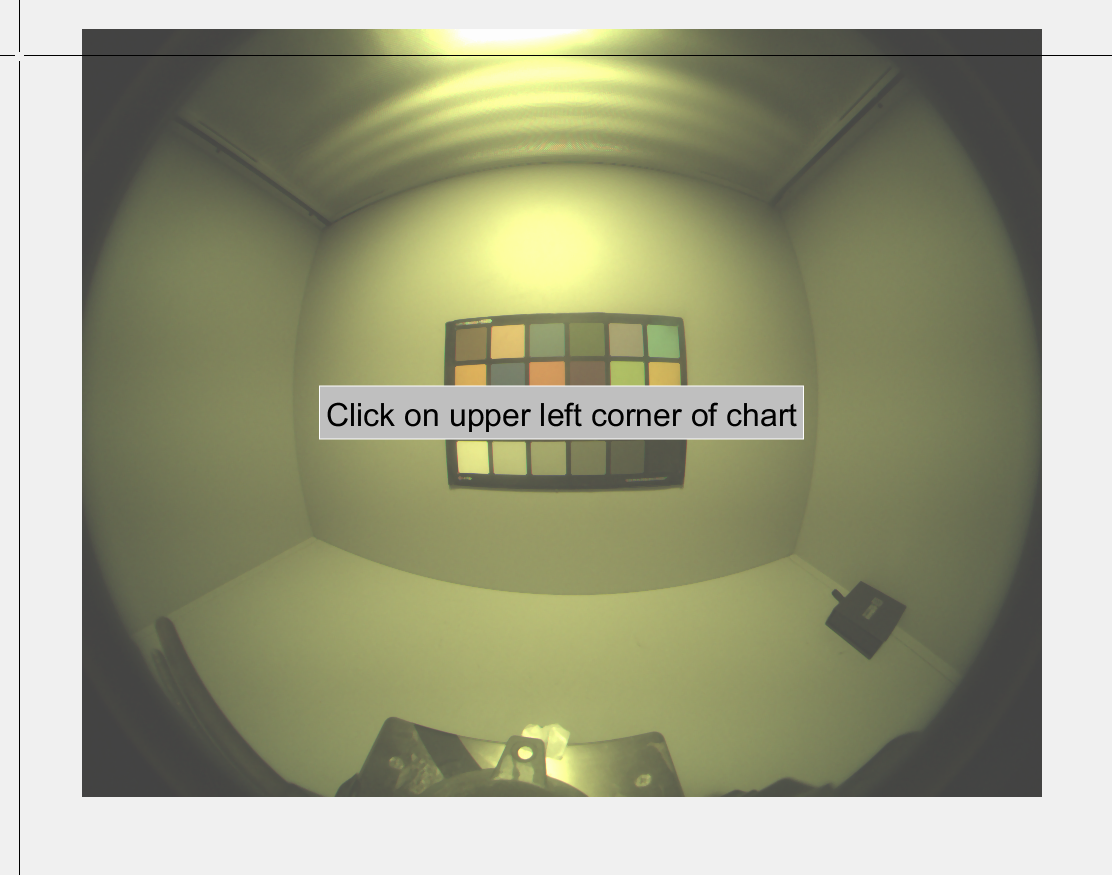 需要Color Chart Location ,可以手動輸入四個頂點的坐標,也可以鼠標點擊,我不會手動輸入。。。
需要Color Chart Location ,可以手動輸入四個頂點的坐標,也可以鼠標點擊,我不會手動輸入。。。
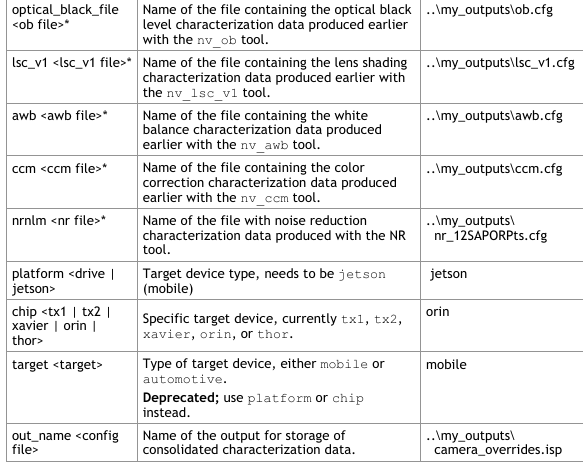
ISP文件生成
nv_wrapper 0 optical_black_file <ob file> lsc_v1 <lsc file>
awb <awb file> ccm <ccm file> radtf <radtf file> nrnlm <nr_file>
platform <drive | jetson> chip <tx1 | tx2 | xavier | orin | thor>
out_name <config file>
skip radtf nrnlm <nr_file>
>nv_wrapper 0 optical_black_file D:\study\nvraw\my_outputs1\ob.cfg lsc_v1 D:\study\nvraw\my_outputs1\lsc_v1.cfg awb D:\study\nvraw\my_outputs1\awb.cfg ccm D:\study\nvraw\my_outputs1\ccm.cfg platform jetson chip orin out_name D:\study\nvraw\my_outputs1\camera_overrides.isp
將以上配置集成到INTO文件中
nv_wrapper 0 \ nrnlm <nr file> module_name "<module_name>" \ nito <nito file> tuning_lib_dir <tuning library directory> \ out_dir <output directory>
nv_wrapper 0 optical_black_file D:\study\nvraw\my_outputs1\ob.cfg lsc_v1 D:\study\nvraw\my_outputs1\lsc_v1.cfg awb D:\study\nvraw\my_outputs1\awb.cfg ccm D:\study\nvraw\my_outputs1\ccm.cfg module_name "OV-OX03H10-VCSEL-GMSL2-FUSA" nito D:\study\nvraw\OV-OX03H10-VCSEL-GMSL2-FUSA.nito tuning_lib_dir D:\study\nvraw\DRIVE_Camera_IQ_Toolkit_7.0.2.0_20250325\tuning\NITO_tools\windows out_dir D:\study\nvraw\my_outputs1



總結(89))
-圖像修復與編輯)


)









![[react] react-router-dom是啥?](http://pic.xiahunao.cn/[react] react-router-dom是啥?)

