項目代碼下載鏈接
YOLOv8是一種單階段(one-stage)檢測算法,它將目標檢測問題轉化為一個回歸問題,能夠在一次前向傳播過程中同時完成目標的分類和定位任務。相較于兩階段檢測算法(如Faster R-CNN),YOLOv8具有更高的檢測速度和實時性。
1.數據集介紹
數據集詳情請閱讀博主寫的博客
數據集介紹![]() https://blog.csdn.net/qq_53332949/article/details/147381833?spm=1011.2415.3001.5331數據集下載鏈接:
https://blog.csdn.net/qq_53332949/article/details/147381833?spm=1011.2415.3001.5331數據集下載鏈接:
2.YOLOv8模型結構
YOLOv8的結構主要分為三部分:Backbone、Neck和Head。
- Backbone
- 用于提取輸入圖像的特征。YOLOv8采用了多種輕量化的卷積模塊(如CSP模塊)和擴展卷積(Depthwise Separable Convolution),提升了特征提取的速度和效率。
- 它能夠有效地捕獲不同尺度和不同特征層次的信息。
- Neck
- 用于融合多尺度特征,實現對小目標的更好檢測。YOLOv8中常用的Neck是PAN(Path Aggregation Network)和FPN(Feature Pyramid Network)的結合,能夠更好地傳遞底層和頂層特征,提高對目標的檢測精度。
- Head
- 負責最終的目標檢測和分類任務。YOLOv8的Head包括分類分支和邊界框回歸分支。分類分支輸出每個候選區域的類別概率,邊界框回歸分支則輸出檢測框的位置和大小。
- YOLOv8采用了Anchor-Free的設計,使得模型可以在不需要預設錨框的情況下進行檢測,減少了計算復雜度,并提升了檢測精度。
YOLOv8模型的整體結構如下圖所示:
 ?
?
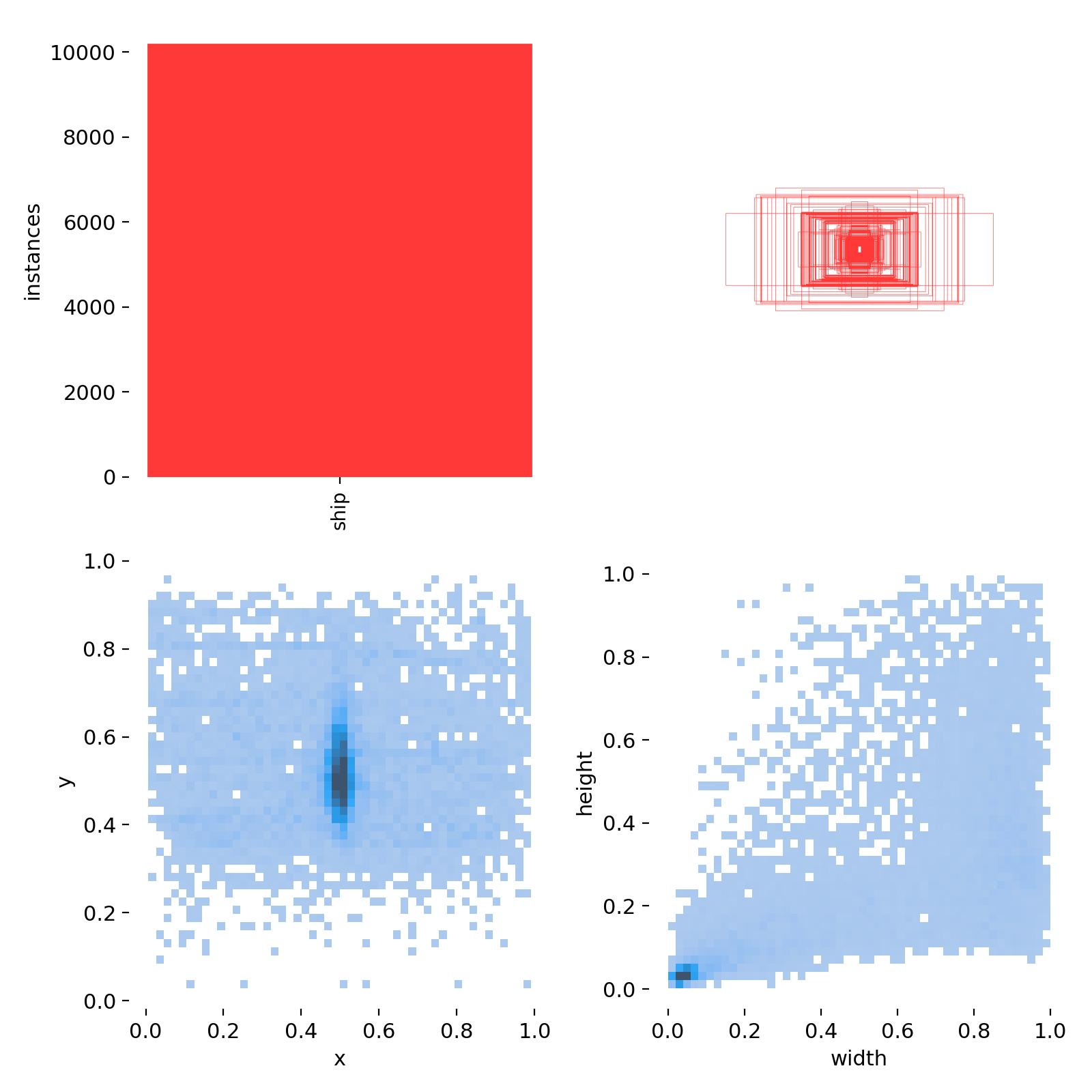
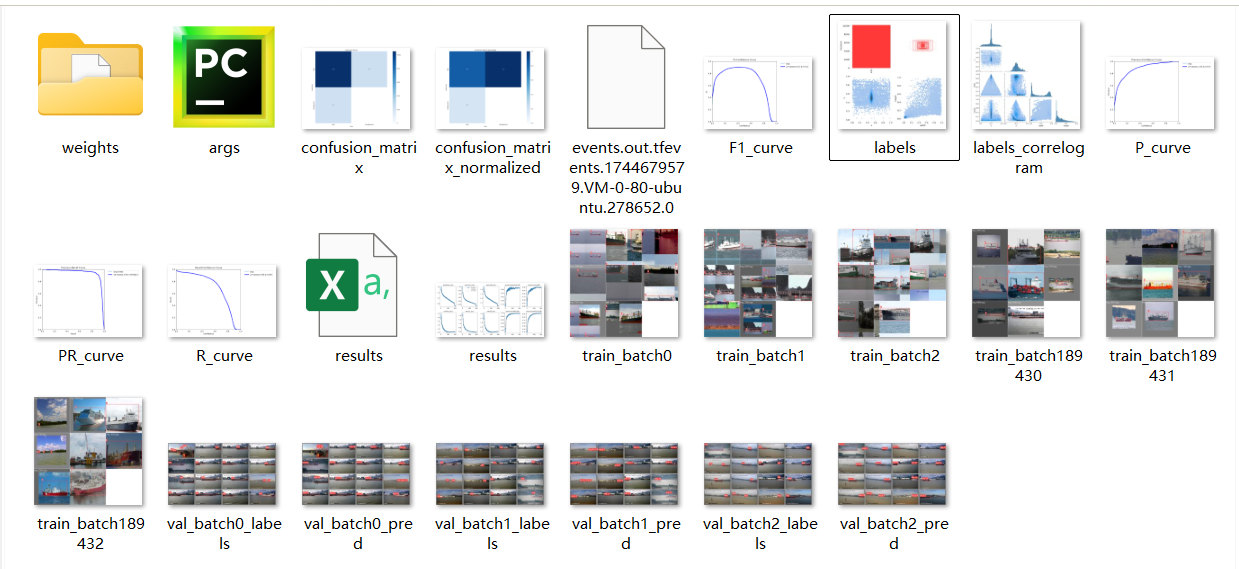
3.模型訓練結果
YOLOv8在訓練結束后,可以在runs目錄下找到訓練過程及結果文件,如下圖所示:
?
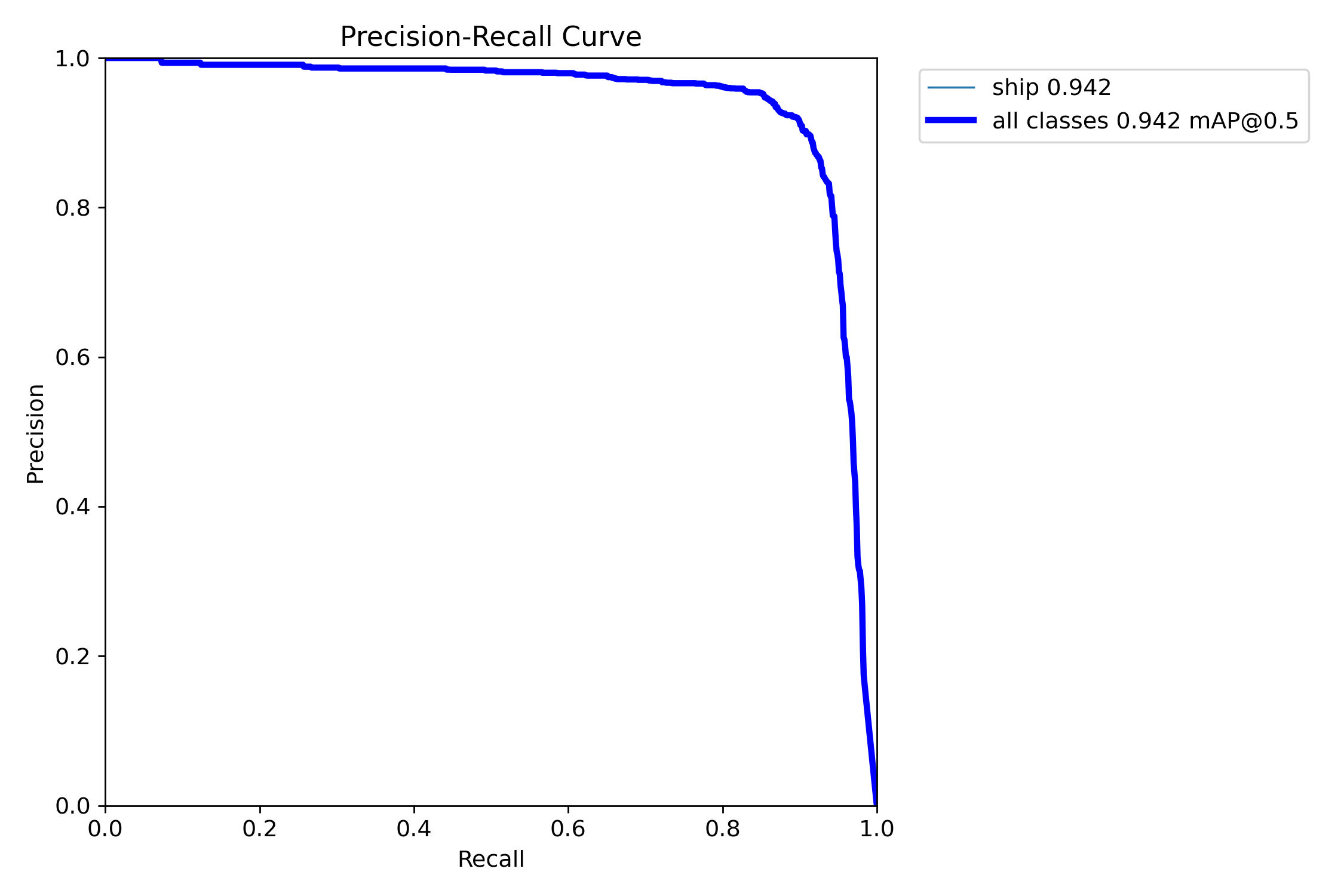
3.1 map@50指標
?
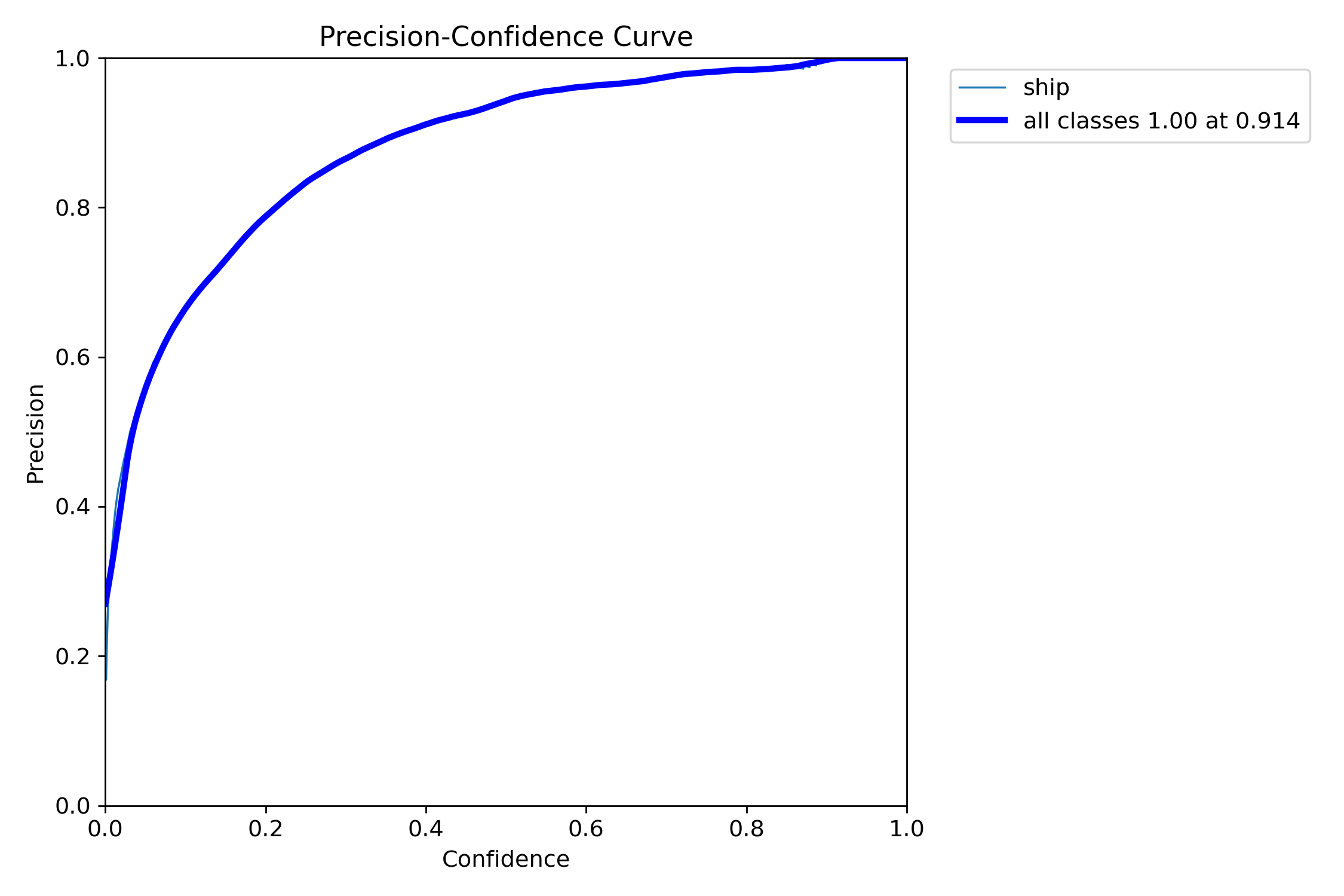
3.2 P_curve.png
?
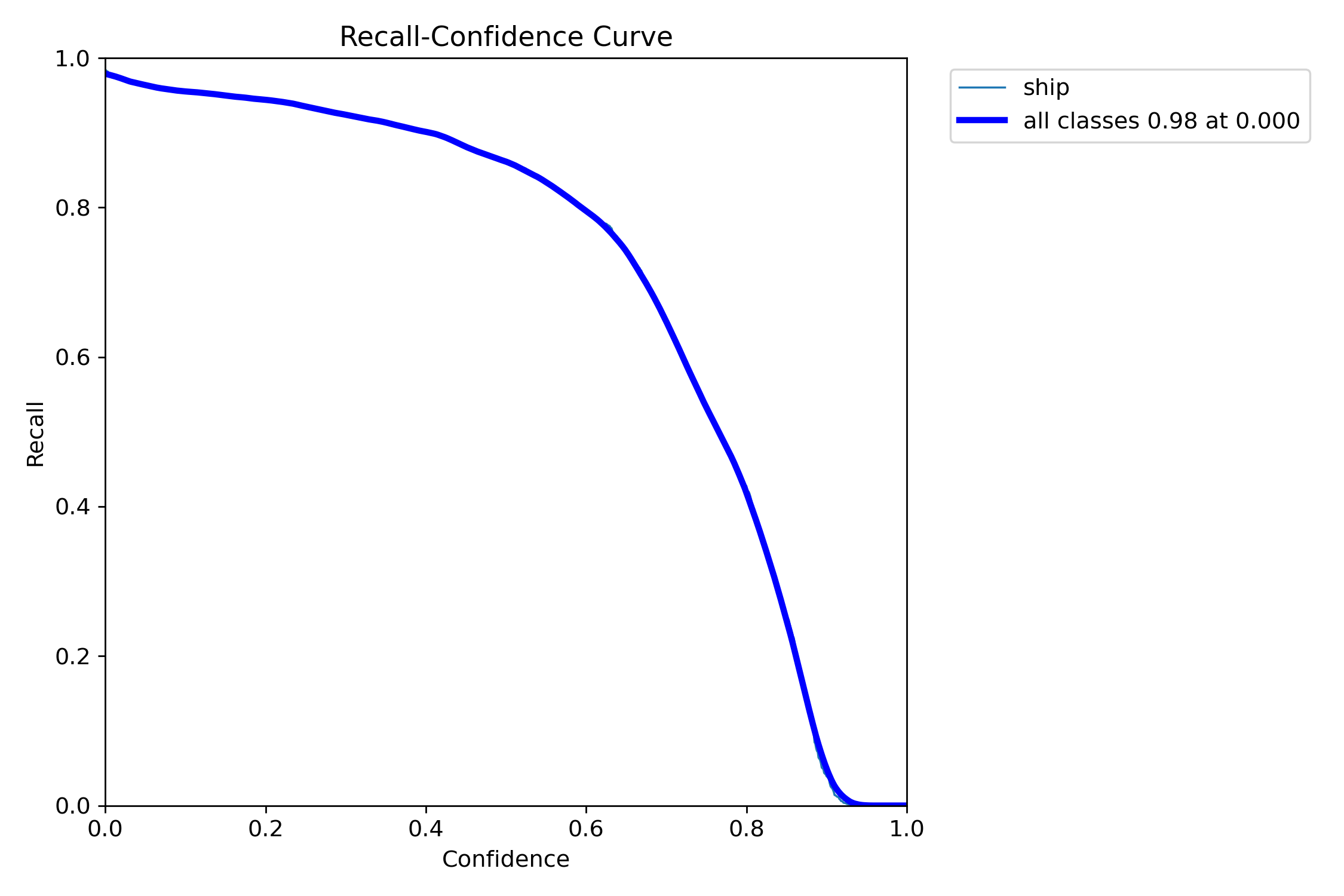
3.3?R_curve.png
?
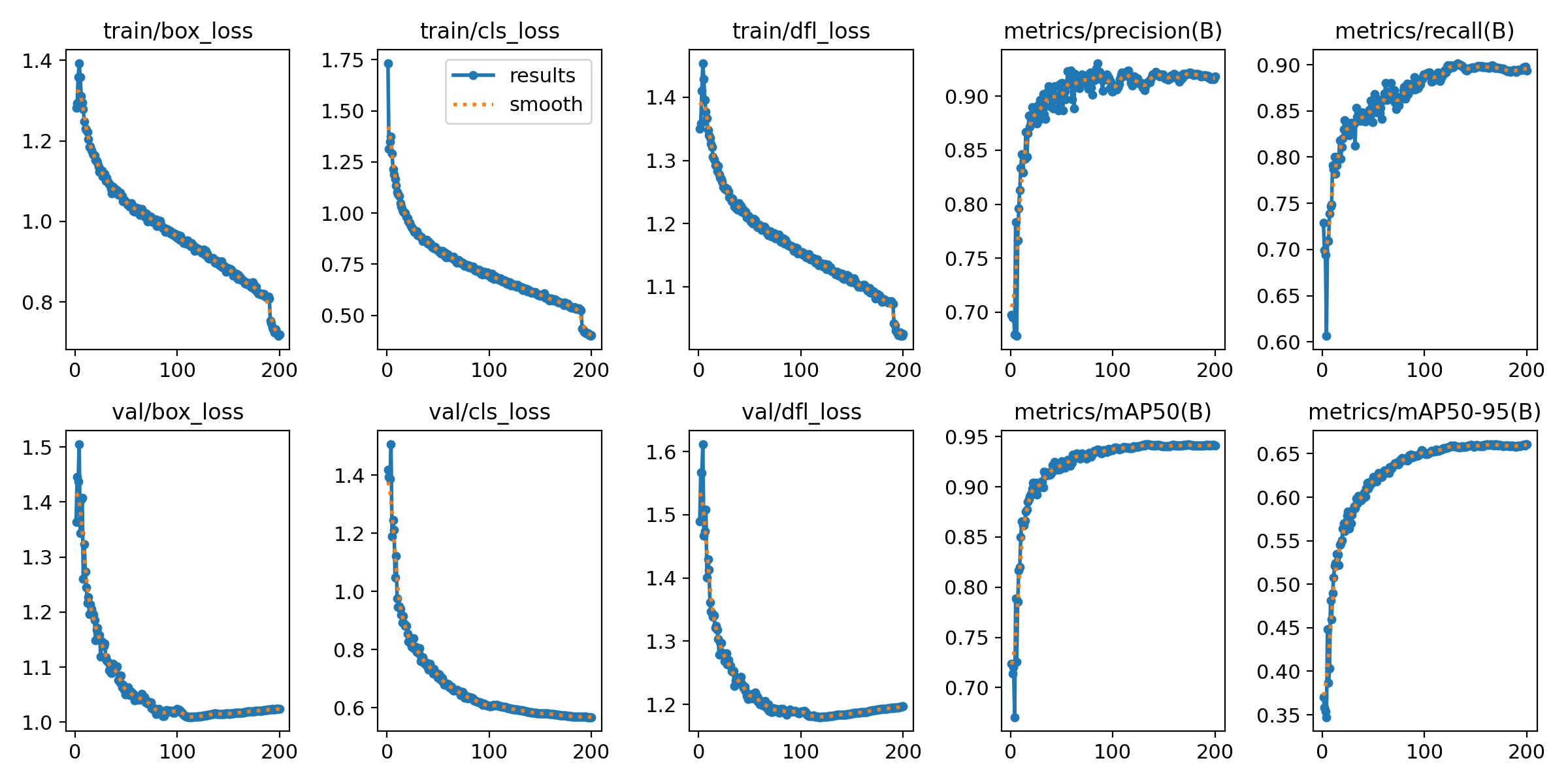
3.4 results.png
?
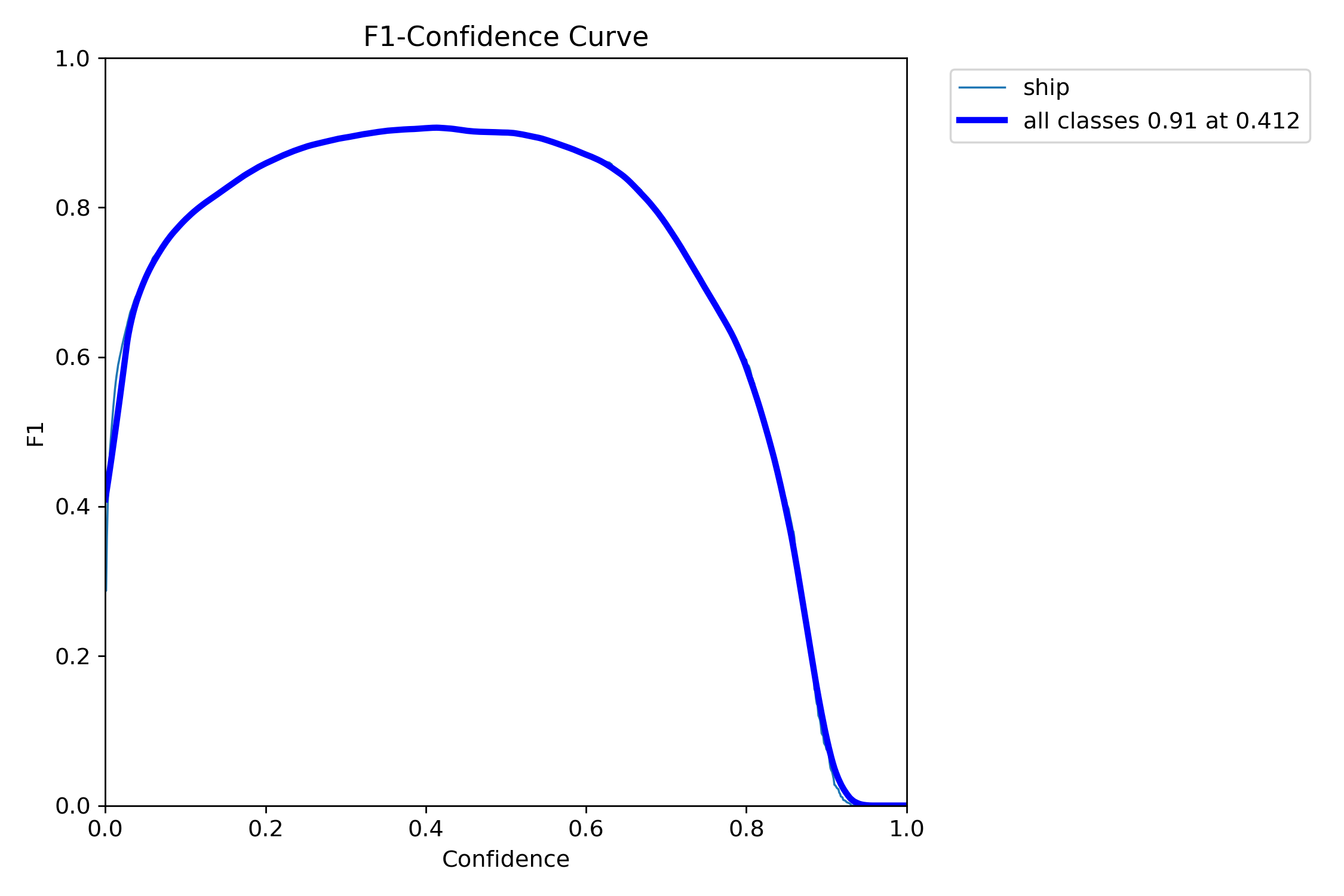
3.5 F1_curve
?
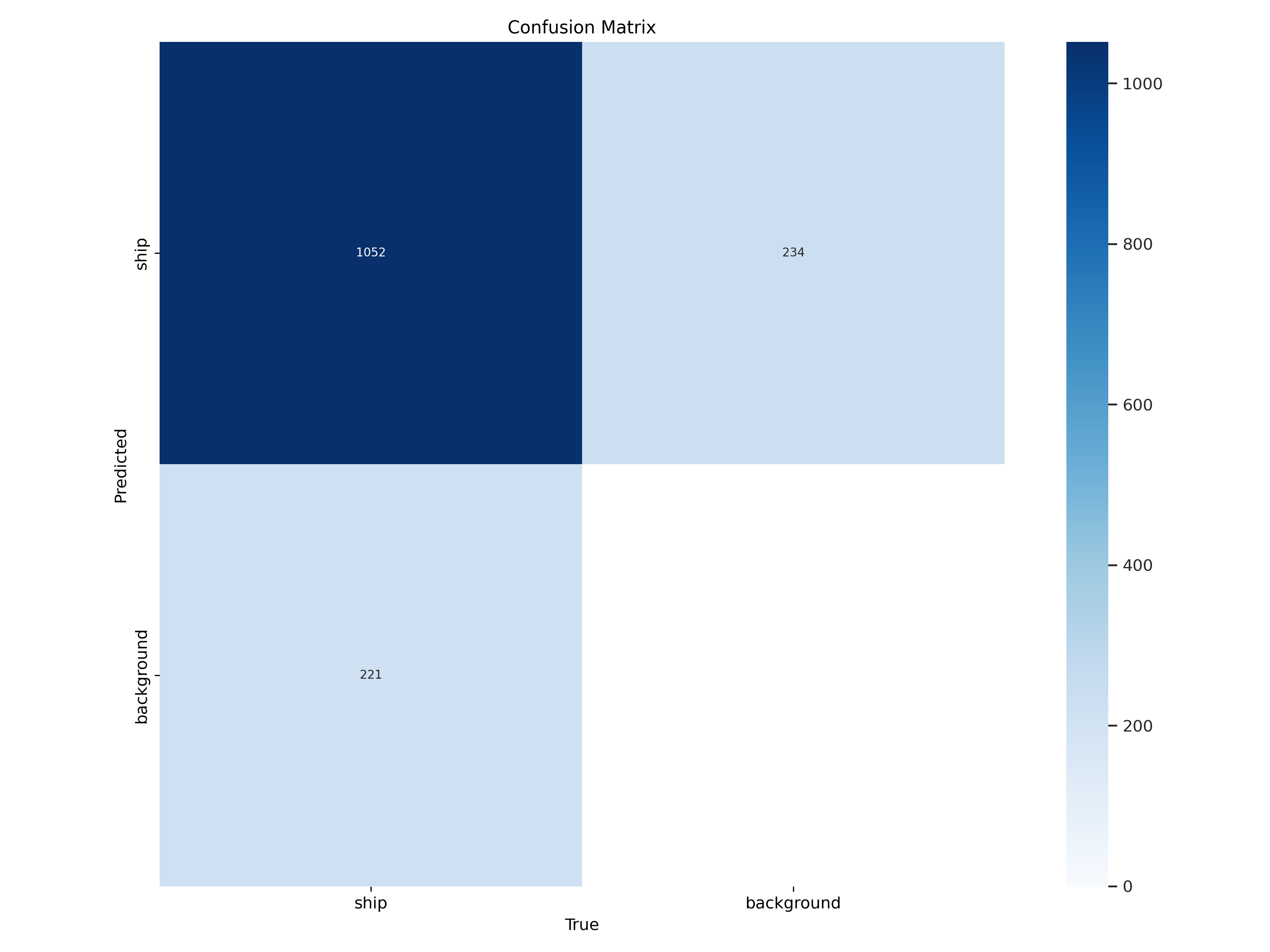
3.6?confusion_matrix
?
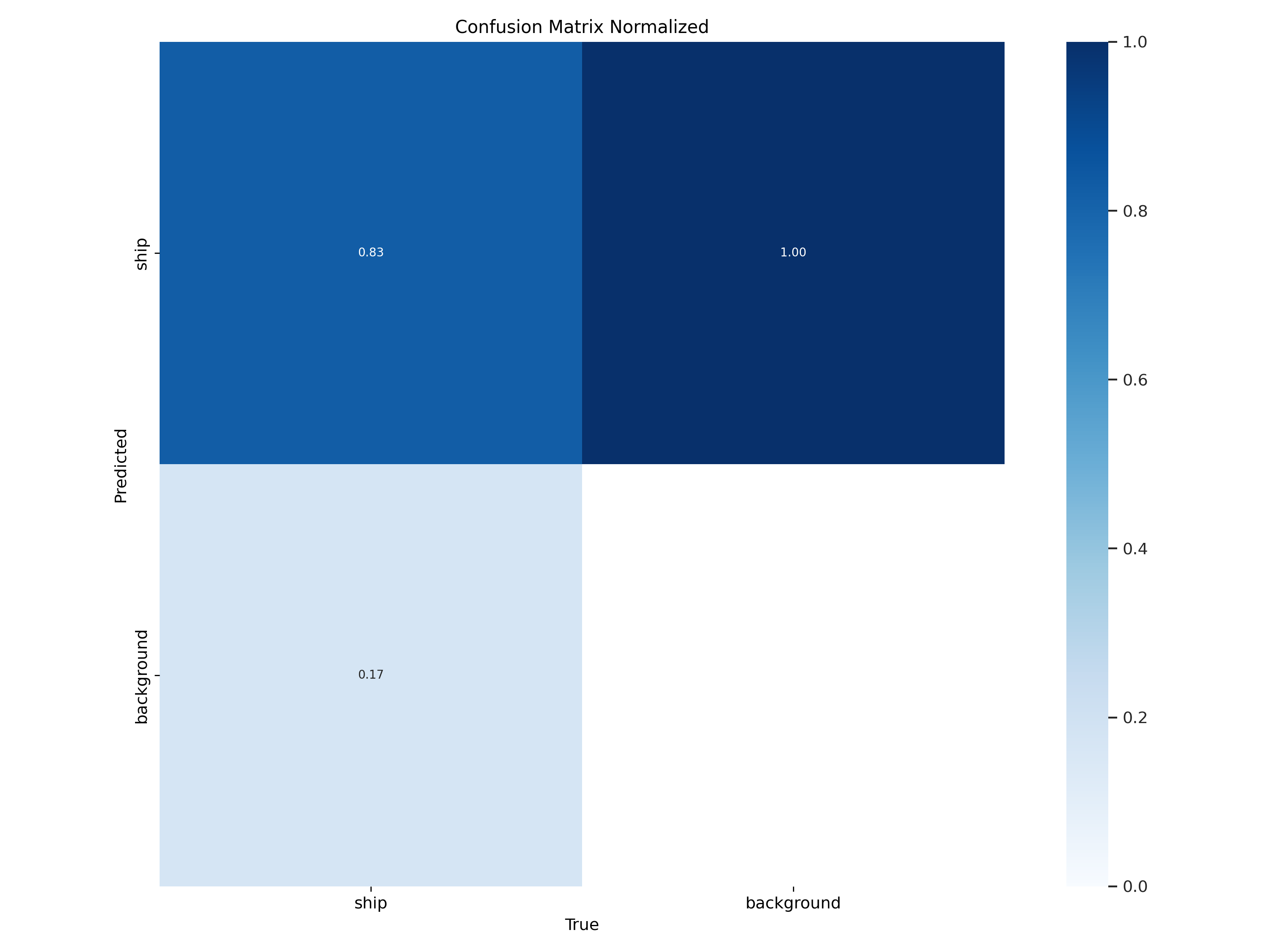
3.7?confusion_matrix_normalized
?
3.8 識別效果圖

平臺設計)



)

和 plumberpdf 的對比分析及使用建議)
原理,公式,應用,算法改進研究綜述,matlab代碼)
,狀態))




)




——表格型方法(蒙特卡洛、時序差分))
)