參考視頻:
33.ROS 的標準消息包 std_msgs_嗶哩嗶哩_bilibili
34. ROS 中的幾何包 geometry_msgs 和 傳感器包 sensor_msgs_嗶哩嗶哩_bilibili
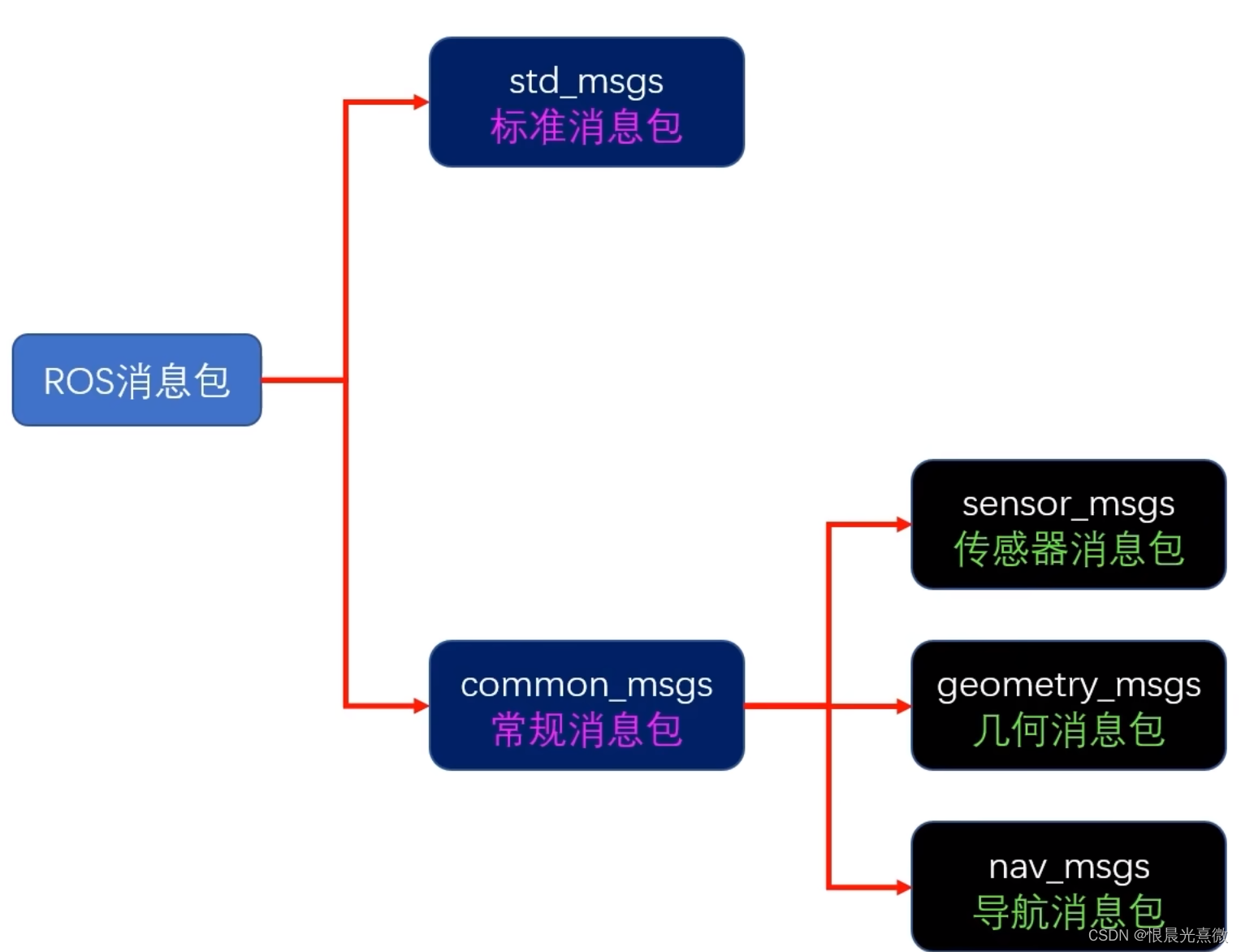
- 標準消息包:std_msgs
- 常用消息包:common_msgs
- 導航消息包:nav_msgs
- 幾何消息包:geometry_msgs
- 傳感器消息包:sensor_msgs
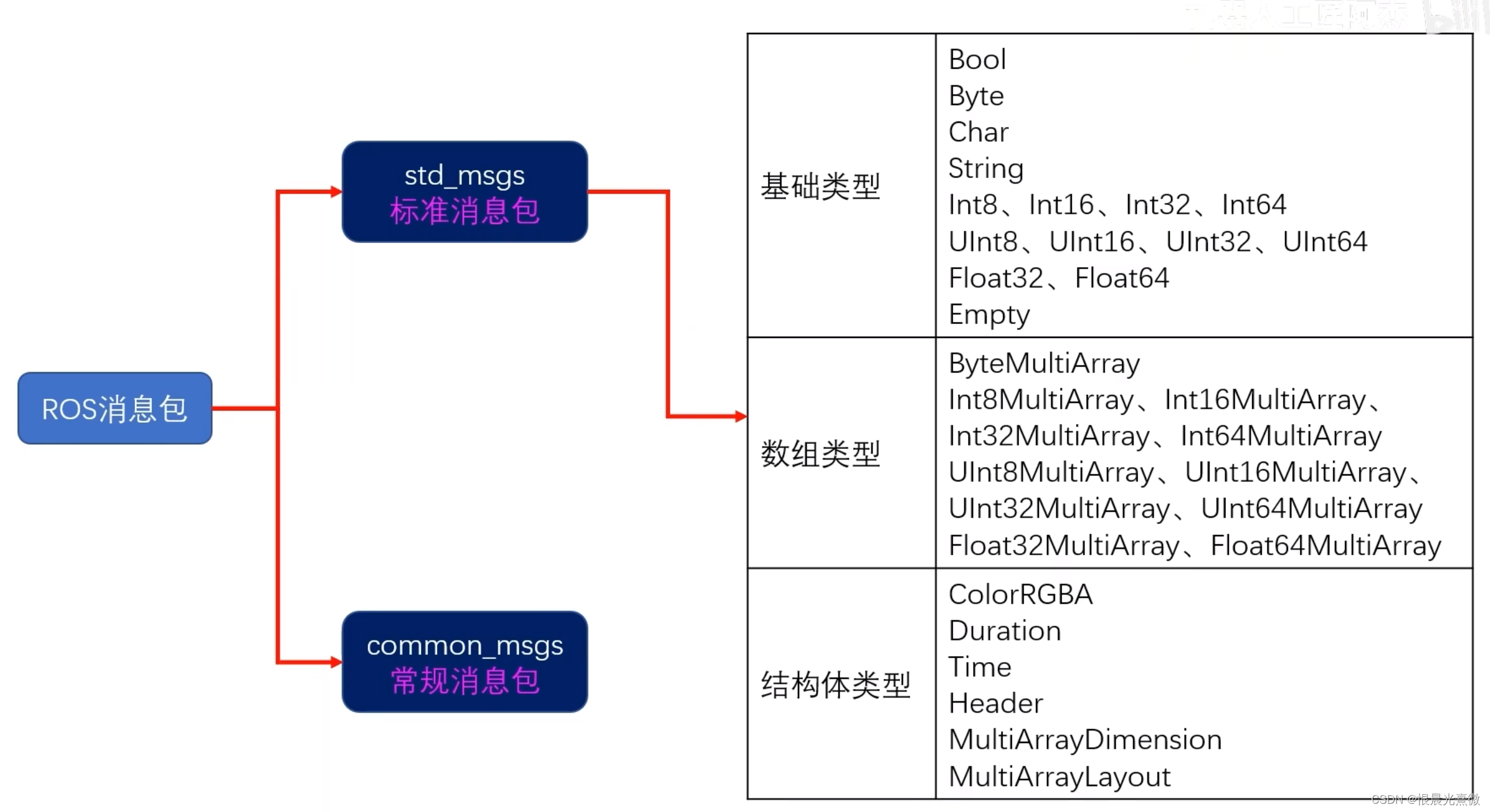
一、標準消息包
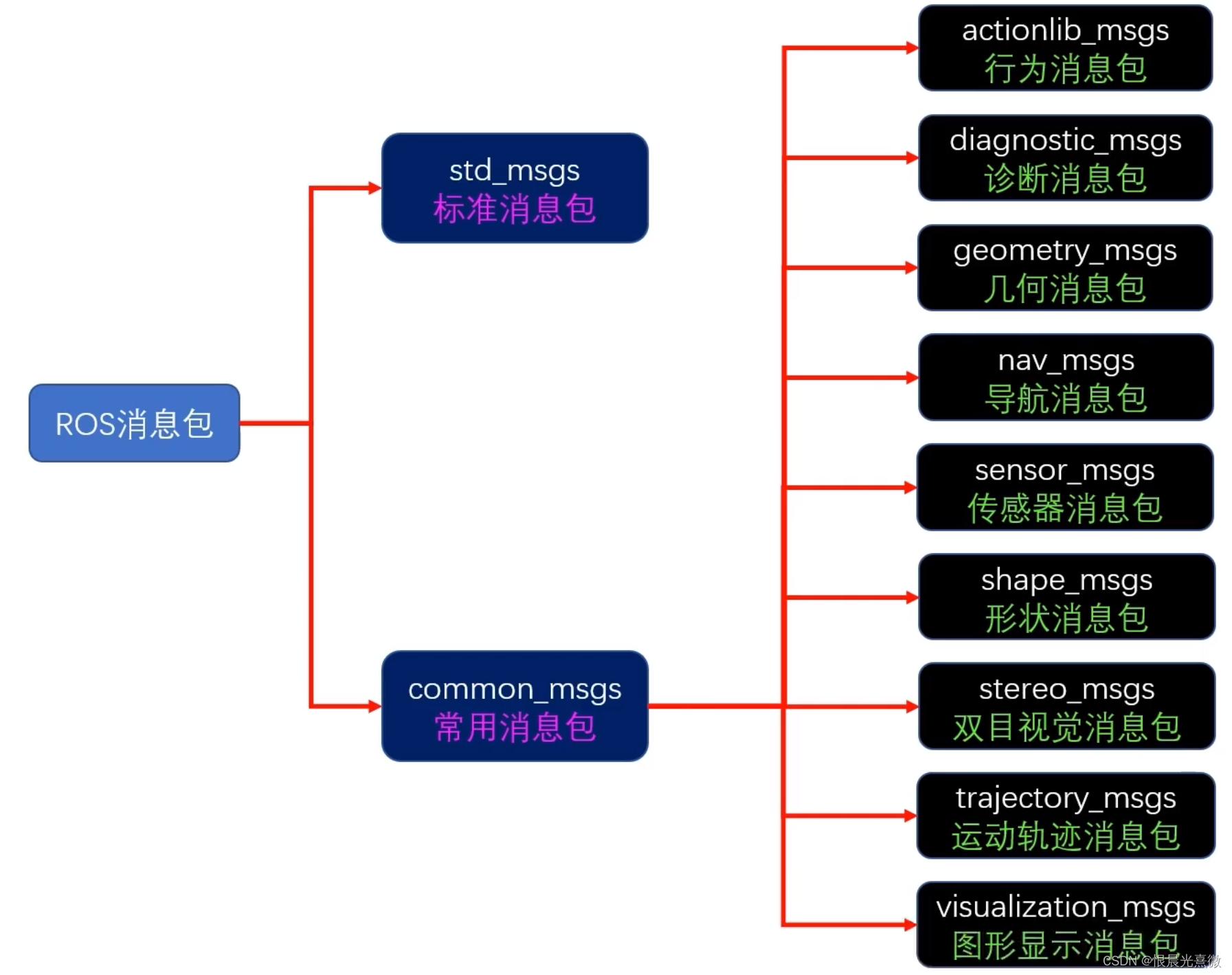
二、常規消息包
三、幾何消息包
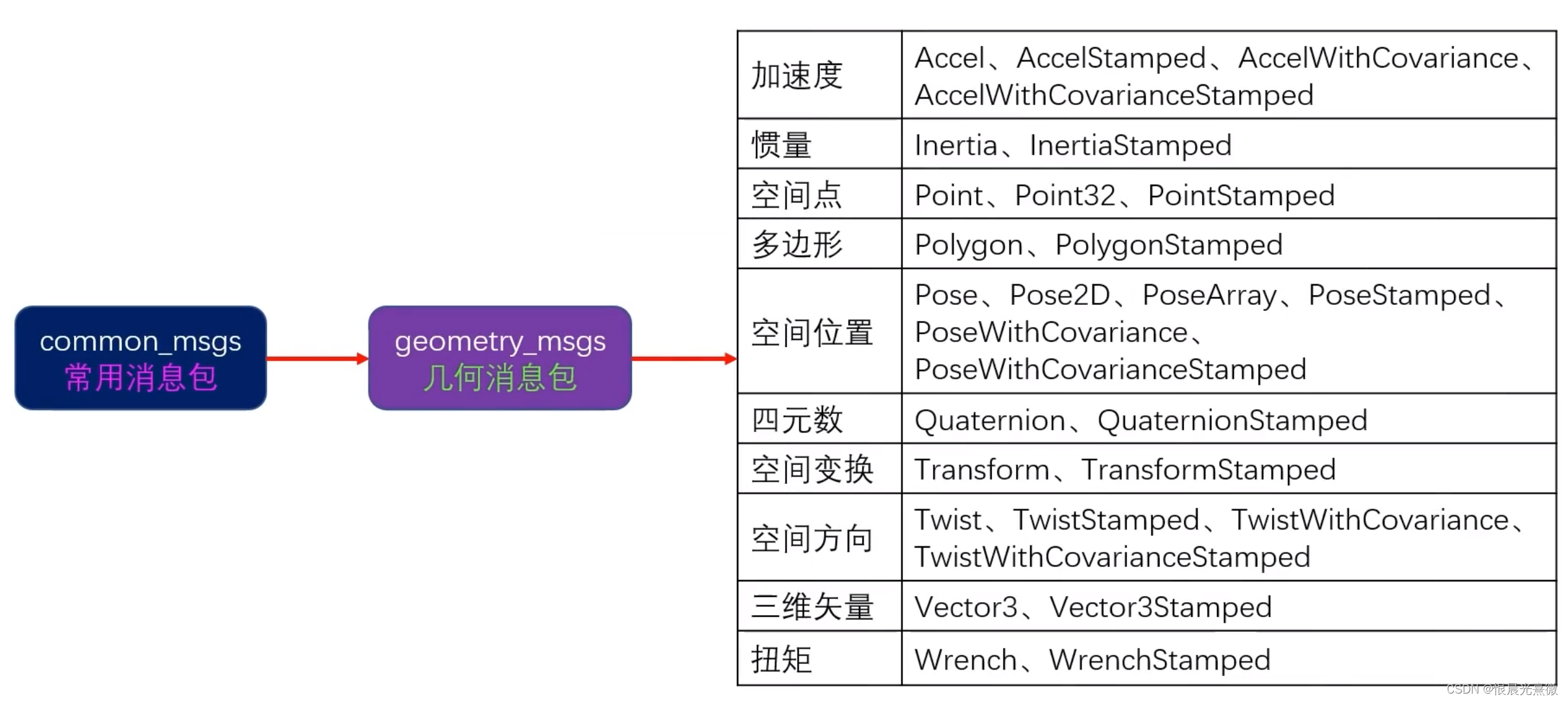
- 其中的一些“消息包類型”的名稱中帶了關鍵詞“stamped”,這些消息包都是多了一個Header,也就是多了時間和坐標系ID,將空間量和時間量進行了綁定,在一些預測/濾波算法里會用得到;
四、傳感器消息包

補充內容:
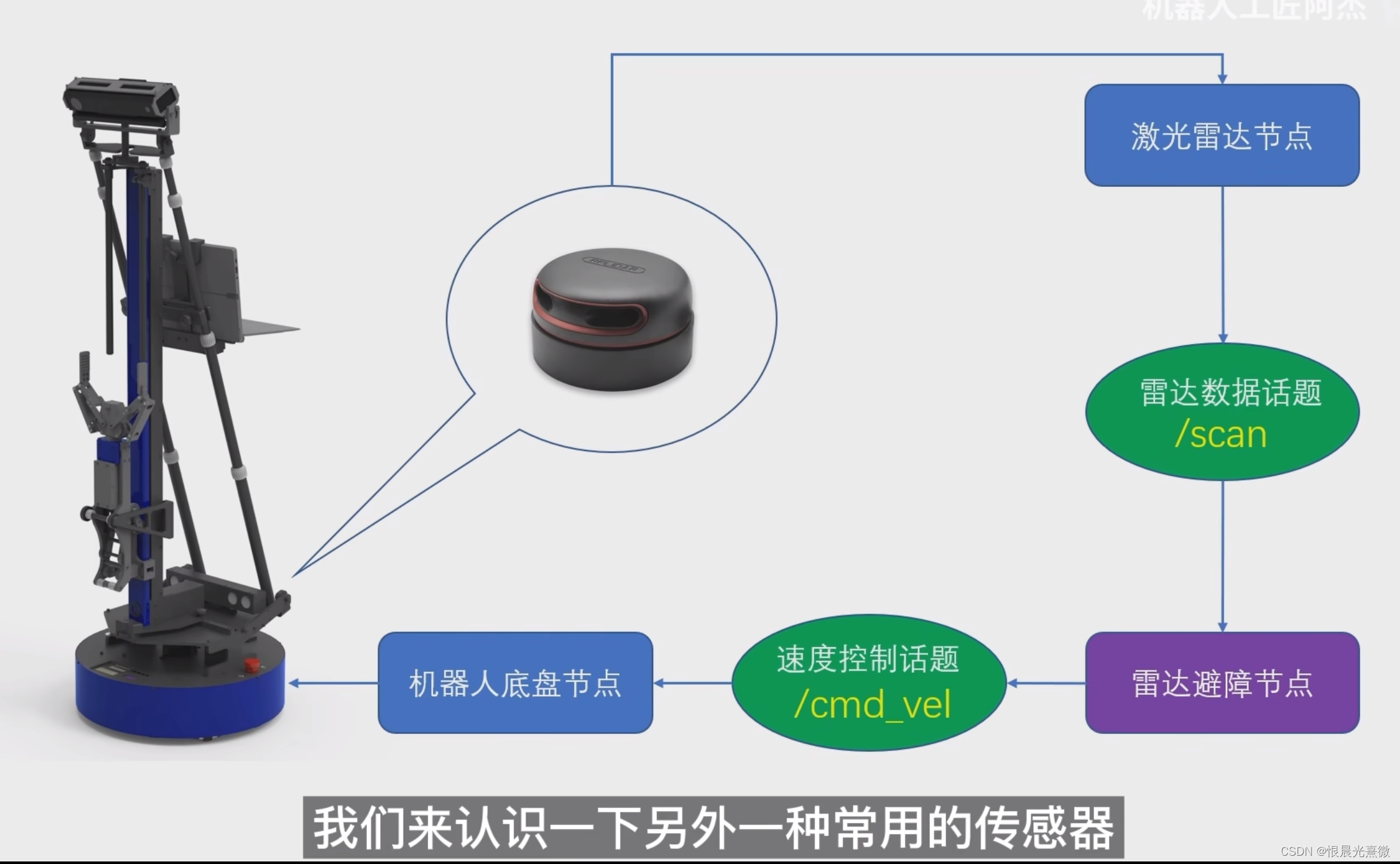
- 使用激光雷達控制機器人底盤
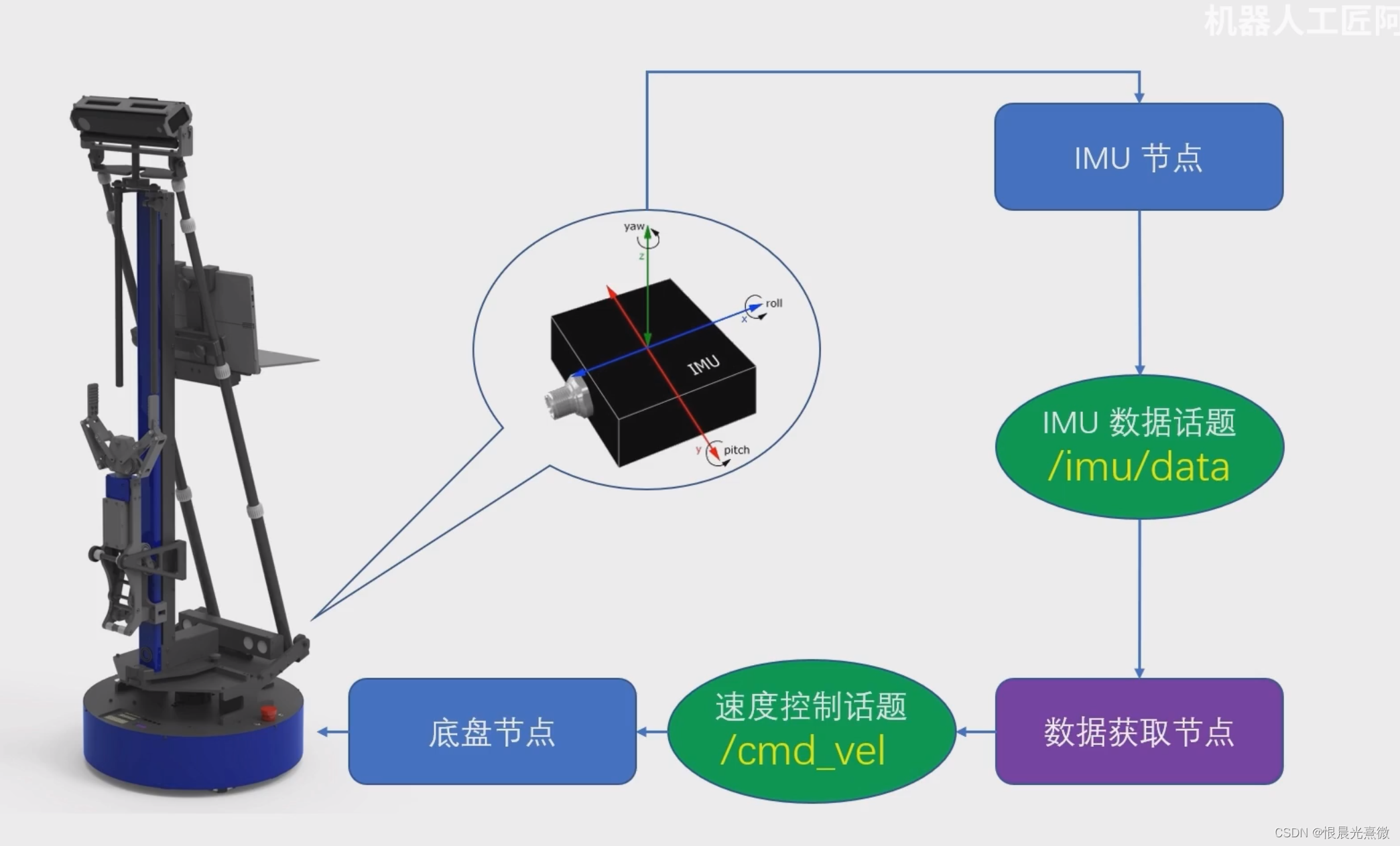
- 使用imu傳感器獲得機器人姿態,控制底盤



)



)







)

——Netty入門)

