1.I2C通信

- I2C 通訊協議(Inter-Integrated Circuit)是由Phiilps公司開發的,由于它引腳少,硬件實現簡單,可擴展性強, 不需要USART、CAN等通訊協議的外部收發設備,現在被廣泛地使用在系統內多個集成電路(IC)間的通訊。
- I2C總線是一種用于芯片之間進行通信的串行總線。它由兩條線組成:串行時鐘線(SCL)和串行數據線(SDA)。SDA(Serial data)是數據線,D代表Data也就是數據,Send Data 也就是用來傳輸數據的;SCL(Serial clock line)是時鐘線,C代表Clock 也就是時鐘 也就是控制數據發送的時序的。這種總線允許多個設備在同一條總線上進行通信。
- 作為一個通信協議,它必須要在硬件和軟件上都做出規定,硬件上的規定,就是你的電路應該如何連接,端口的輸入輸出模式都是啥樣的,軟件上的規定,就是你的時序是怎么定義的,字節如何傳輸,高位先行還是低位先行,一個完整的時序有哪些部分構成這些東西,硬件的規定和軟件的規定配合起來,就是一個完整的通信協議。
2.I2C硬件電路
? 所有I2C設備的SCL連在一起,SDA連在一起
? 設備的SCL和SDA均要配置成開漏輸出模式
? SCL和SDA各添加一個上拉電阻,阻值一般為4.7KΩ左右
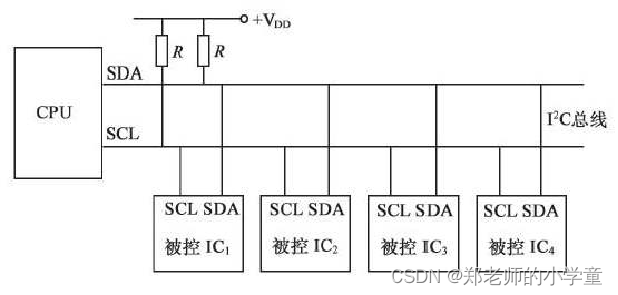
- ?第一個就是I2C的典型電路模型,這個模型采用了一主多從的結構。我們可以看到CPU作為主設備,控制著總線并擁有很大的權利。其中,主機對SCL線擁有完全的控制權,無論何時何地,主機都負責掌控SCL線。在空閑狀態下,主機還可以主動發起對SDA的控制。但是,從機發送數據或應答時,主機需要將SDA的控制權轉交給從機。
-
我們看到了一系列被控IC,它們是掛載在I2C總線上的從機設備,如姿態傳感器、OLED、存儲器、時鐘模塊等。這些從機的權利相對較小。對于SCL時鐘線,它們在任何時刻都只能被動的讀取,不允許控制SCL線;對于SDA數據線,從機也不允許主動發起控制,只有在主機發送讀取從機的命令后,或從機應答時,從機才能短暫地取得SDA的控制權。這就是一主多從模型中協議的規定。
-
由于現在是一主多從結構,主機擁有SCL的絕對控制權,因此主機的SCL可以配置成推挽輸出,所有從機的SCL都配置成浮空輸入或上拉輸入。數據流向為主機發送、所有從機接收。但是到SDA線這里就比較復雜了,因為這是半雙工協議,所以主機的SDA在發送時是輸出,在接收時是輸入。同樣地,從機的SDA也會在輸入和輸出之間反復切換。如果能夠協調好輸入輸出的切換時機就沒有問題。但是這樣做的話,如果總線時序沒有協調好,就極有可能發生兩個引腳同時處于輸出的狀態。如果此時一個引腳輸出高電平,一個引腳輸出低電平,就會造成電源短路的情況,這是要極力避免的。為了避免這種情況的發生,I2C的設計規定所有設備不輸出強上拉的高電平,而是采用外置弱上拉電阻加開漏輸出的電路結構。這兩點規定對應于前面提到的“設備的SCL和SDA均要配置成開漏輸出模式”以及“SCL和SDA各添加一個上拉電阻,阻值一般為4.7KΩ左右”。對應第二個圖。
-
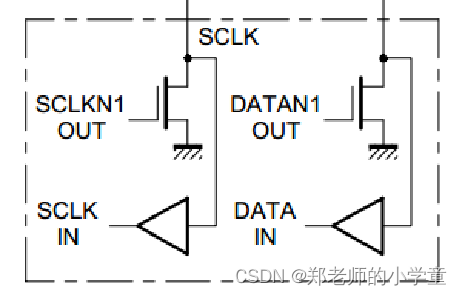
推挽輸出:上面一個開關管連接正極,下面一個開關管連接負極。當上面導通時,輸出高電平;下面導通時,輸出低電平。因為這是通過開關管直接連接到正負極的,所以這是強上拉和強下拉的模式。
開漏輸出:就是去掉這個強上拉的開關管,輸出低電平時,下管導通,是強下拉,輸出高電平時,下管斷開,但是沒有上管了,此時引腳處于浮空的狀態,這就是開漏輸出。? ? ? ? ? ? ? ? ?(我們之前的彈簧和桿子的模型來解釋,就是SCL或SDA就是一根桿子,為了防止有人向上推桿子,有人向下拉桿子造成沖突,我們就規定所有的人不準向上推桿子,只能選擇向下拉或者放手,然后我們再外置一根彈簧向上拉,你要輸出低電平就往下拽,這個彈簧肯定拽不贏你,所以彈簧被拉伸桿子處于低電平狀態,你要輸出高電平就放手,桿子在彈簧的拉力下回彈到高電平,這就是一個弱上拉的高電平,但是完全不影響數據傳輸。) -
就是這個模式會有一個“線與”的現象。就是只要有任意一個或多個設備輸出了低電平,總線就處于低電平,只有所有設備都輸出高電平,總線才處于高電平。I2C可以利用這個電路特性執行多主機模式下的時鐘同步和總線仲裁,所以這里SCL雖然在一主多從模式下可以用推挽輸出,但是它仍然采用了開漏加上拉輸出的模式,因為在多主機模式下會利用到這個特征。
3.I2C時序單元
3.1 起始和終止

- ?起始條件是指SCL高電平期間,SDA從高電平切換到低電平。在I2C總線處于空閑狀態時,SCL和SDA都處于高電平狀態,也就是沒有任何一個設備去碰SCL和SDA,由外掛的上拉電阻拉高至高電平,總線處于平靜的高電平狀態。當主機需要數據收發時打破平靜,會首先產生一個起始條件。這個起始條件是,SCL保持高電平,然后把SDA拉低,產生一個下降沿。當從機捕獲到這個SCL高電平,SDA下降沿信號時,就會進行自身的復位,等待主機的召喚。之后,主機需要將SCL拉低。這樣做一方面是占用這個總線,另一方面也是為了方便這些基本單元的拼接。這樣,除了起始和終止條件,每個時序單元的SCL都是以低電平開始,低電平結束。
- 終止條件是SCL高電平期間,SDA從低電平切換到高電平。SCL先放開并回彈到高電平,SDA再放開并回彈高電平,產生一個上升沿。這個上升沿觸發終止條件,同時終止條件之后,SCL和SDA都是高電平,回歸到最初的平靜狀態。這個起始條件和終止條件就類似串口時序里的起始位和停止位。一個完整的數據幀總是以起始條件開始、終止條件結束。另外,起始和終止都是由主機產生的。因此,從機必須始終保持雙手放開,不允許主動跳出來去碰總線。如果允許從機這樣做,那么就會變成多主機模型,不在本節的討論范圍之內。這就是起始條件和終止條件的含義。
3.2 發送字節
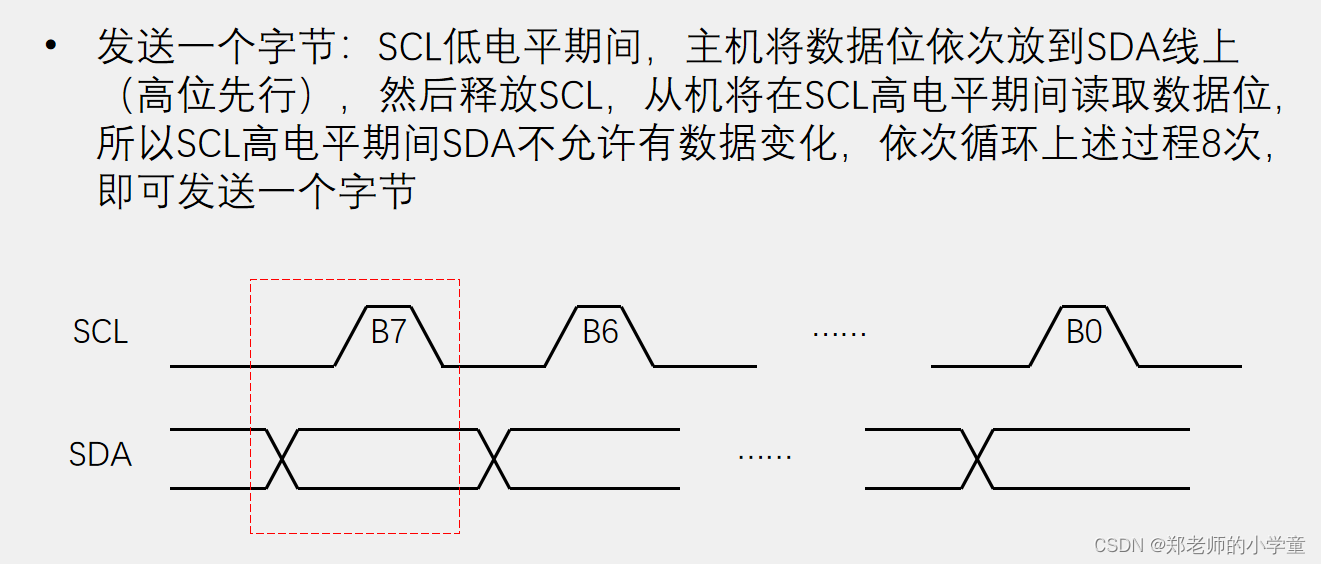
?就是SCL低電平期間,主機將數據位依次放到SDA線上,高位先行,然后釋放SCL,從機將在SCL高電平期間讀取數據位,所以SCL高電平期間,SDA不允許有數據變化,依次循環上述過程8次即可發送一個字節,起始條件之后,第一個字節也必須是主機發送的,主機如何發送呢,就是最開始SCL低電平,主機如果想發送0,就拉低SDA到低電平,如果想發送1就放手,SDA回彈到高電平,在SCL低電平期間允許改變SDA的電平,當這一位放好之后,主機就松手時鐘線,SCL回彈到高電平,在高電平期間是從機讀取SDA的時候,所以高電平期間SDA不允許變化,那主機在放手SCL一段時間后就可以繼續拉低SCL傳輸下一位了,主機也需要在SCL下降沿之后,盡快把數據放在SDA上,但是主機有時鐘的主導權哈,所以主機并不需要那么著急,只需要在低電平的任意時刻把數據放在SDA上就行了,晚點也沒關系,數據放完之后,主機再松手SCL,SCL高電平,從機讀取這一位。就這樣的流程,主機拉低SCL,把數據放在SDA上,主機松開SCL,從機讀取SDA的數據,在SCL的同步下,依次進行主機發送和從機接收,循環8次,就發送了8位數據,也就是一個字節,另外注意,這里是高位先行,所以第一位是一個字節的最高位B7,然后依次是次高位B6…這個和串口是不一樣的,串口時序是低位先行,這里I2C是高位先行。
另外由于這里有時鐘線進行同步,所以如果主機一個字節發送一半,突然進中斷了,不操作SCL和SDA的,那時序就會在中段的位置不斷拉長,SCL和SDA電平都暫停變化,傳輸也完全暫停,等中段結束后,主機回來繼續操作,傳輸仍然不會出問題,這就是同步時序的好處。
3.3 接收字節

和上面接收字節基本一樣,區別就是SDA線,主機在接收之前需要釋放SDA,然后這時從機就取得了SDA的控制權,從機需要發送0就把SDA拉低,從機需要發送1就放手,SDA回彈高電平,然后同樣的,低電平變換數據,高電平讀取數據,這里實線部分表示主機控制的電平,虛線部分表示從機控制的電平,SCL全程由主機控制,SDA主機在接收前要釋放,交由從機控制,之后還是一樣,因為SCL始終是有主機控制的,所以從機的數據變換基本上都是貼著SCL下降沿進行的,而主機可以在SCL高電平的任意時刻讀取,這是接收一個字節的時序。
3.4 發送應答及接收應答

?發送應答和接收應答就是當我們在調用發送一個字節之后,就要緊跟著調用接收應答的時序,用來判斷從機有沒有收到剛才給它的數據,如果從機收到了,那在應答位這里,主機釋放SDA的時候,從機就應該立刻把SDA拉下來,然后在SCL高電平期間,主機讀取應答位,如果應答位為0,就說明從機確實收到了
4.I2C時序
4.1 指定地址寫
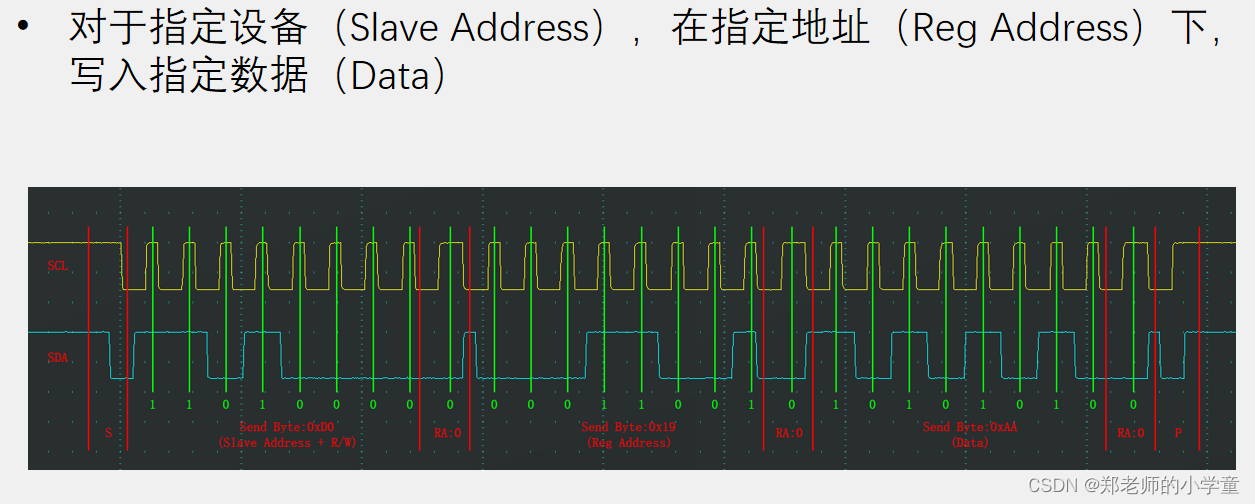
- ?在這里上面的線是SCL,下面的線是SDA空閑狀態都是高電平,然后主機需要給從機寫入數據的時候,首先SCL高電平期間,拉低SDA產生起始條件,在起始條件之后,緊跟著的時序,必須是發送一個字節的時序,字節的內容必須是從機地址+讀寫位,正好從機地址是7位,讀寫位是1位,加起來是一個字節8位,發送從機地址,就是確定通信的對象,發送讀寫位,就是確認我接下來是要寫入還是要讀出,具體發送的時候呢,在這里低電平期間SDA變換數據,高電平期間從機讀取SDA,這里我用綠色的線來標明了從機讀到的數據,比如這樣的波形,那從機收到的第一位就是高電平1,然后SCL低電平期間主機繼續變換數據,因為第二位還是1,所以這里SDA電平并沒有變換,然后SCL高電平,從機讀到第二位是1,之后繼續低電平變換數據,高電平讀取數據,第三位就是0,這樣持續8次就發送了一個字節數據,其中這個數據的定義:高7位表示從機地址,比如這個波形下,主機尋找的統計地址就是1101000,這個就是MPU6050的地址,然后最低位表示讀寫位,0表示之后的時序主機要進行寫入操作,1表示之后的時序主機要進行讀出操作,這里是0,說明之后我們要進行寫入操作,那目前主機是發生了一個字節,字節內容轉化為16進制,高位先行就是0xD0 ,然后根據協議規定,緊跟著的單元就得是接收從機的應答位(Receive Ack(RA)),在這個時刻主機要釋放SDA,釋放SDA之后引腳電平回彈到高電平,.但是根據協議規定,從機要在這個位拉低SDA,所以單看從機的波形,該應答的時候從機立刻拽住SDA,然后應答結束之后,從機再放開SDA,那現在綜合兩者的波形,結合線與的特性,在主機釋放SDA之后,由于SDA也被從機拽住了,所以主機松手后,SDA并沒有回彈高電平。
-
應答結束后,我們要繼續發送一個字節,同樣的時序再來一遍,第二個字節就可以送到指定設備的內部來,從機設備可以自己定義第二個字節和后續字節的用途,一般第二個字節可以是寄存器地址,或者是指令控制字等,比如MPU16050定義的第二個字節就是寄存器地址,比如AD轉換器,第二個字節可能就是指令控制字,比如存儲器,第二個字節可能就是存儲器地址,那圖示這里主機發送這樣一個波形,我們一一判定,數據為00011001,即主機向從機發送了0x19 這個數據,第一部分解讀的前七位出來的是MPU6050,在MPU6050 里,就表示我要操作你0x19地址下的寄存器了,接著同樣是從機應答,主機釋放SDA,從機拽住SDA,SDA表現為低電平,主機收到應答位為0,表示收到了從機的應答,然后繼續同樣的流程。
-
再來一遍,主機再發送一個字節,這個字節就是主機想要寫入到0x19地址下寄存器的內容了,比如這里發送了0xAA的波形,就表示我在0x19地址下寫入0xAA,最后是接收應答位,如果主機不需要繼續傳輸了,就可以產生停止條件,在停止條件之前先拉低SDA,為后續SDA的上升沿做準備,然后釋放SCL,再釋放SDA,這樣就產生了SCL高電平期間SDA的上升沿,這樣一個完整的數據幀就拼接完成了,那套用上面這句話呢,這個數據幀的目的,就是對于指定從機地址為1001000的設備,在其內部0x19地址下的寄存器中,寫入0xAA這個數據。
4.2 當前地址讀
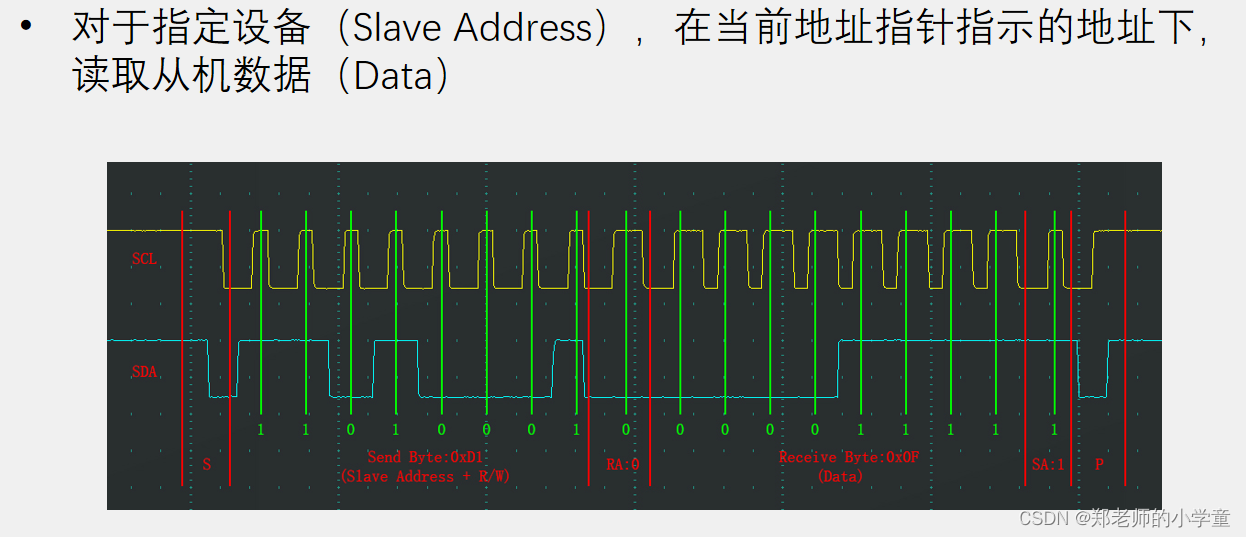
?如果主機想要讀取從機的數據,就可以執行這個時序,那最開始還是SCL高電平期間,拉低SDA產生起始條件,起始條件開始后,主機必須首先調用發送一個字節,來進行從機的尋址和指定讀寫標志位,比如圖示的波形,表示本次尋址的目標是1101000的設備,同時最后一位讀寫標志為1,表示主機接下來想要讀取數據,緊跟著發送一個字節之后接收一下從機應答位,從機應答為0代表從機收到了第一個字節,在從機應答之后,從這里開始數據的傳輸方向就要反過來了,因為剛才主機發出了讀的命令,所以這之后主機就不能繼續發送了,要把SDA的控制權交給從機,主機調用接收一個字節的時序進行接收操作,然后在這一塊從機就得到了主機的允許,可以在SCL低電平之間寫入SDA,然后主機在SCL高電平期間讀取SDA,那最終主機在SCL高電平期間,依次讀取8位,就接收到了從機發送的一個字節數據,00001111,也就是0x0f,那現在問題就來了,這個0x0f是從機哪個寄存器的數據呢,我們看到在讀的時序中,I2C協議的規定是,主機進行尋址時,一旦讀寫標志位給1了,下一個字節就要立馬轉為讀的時序,所以主機還來不及指定,我想要讀哪個寄存器就得開始接收了,所以這里就沒有指定地址這個環節,那主機并沒有指定寄存器的地址,從機到底該發哪個寄存器的數據呢,這需要用到我們上面說的當前地址指針了,在從機中,所有的寄存器被分配到了一個線性區域中,并且會有個單獨的指針變量,指示著其中一個寄存器,這個指針上電默認一般指向0地址,并且每寫入一個字節和讀出一個字節后,這個指針就會自動自增一次,移動到下一個位置,主機沒有指定要讀哪個地址,從機就會返回當前指針指向的寄存器的值,那假設我剛剛調用了這個指定地址寫的時序,在0x19 的位置寫出了0xAA,那么指針就會加1移動到0x1A(0x19+1=0x1A)的位置,我再調用這個當前地址讀的時序,返回的就是0x1A地址下的值,如果再調用一次,返回的就是0x1B地址下的值,以此類推,這就是當前地址讀時序的操作邏輯,由于當前地址讀并不能指定讀的地址,所以這個時序用的不是很多。
4.3 指定地址讀
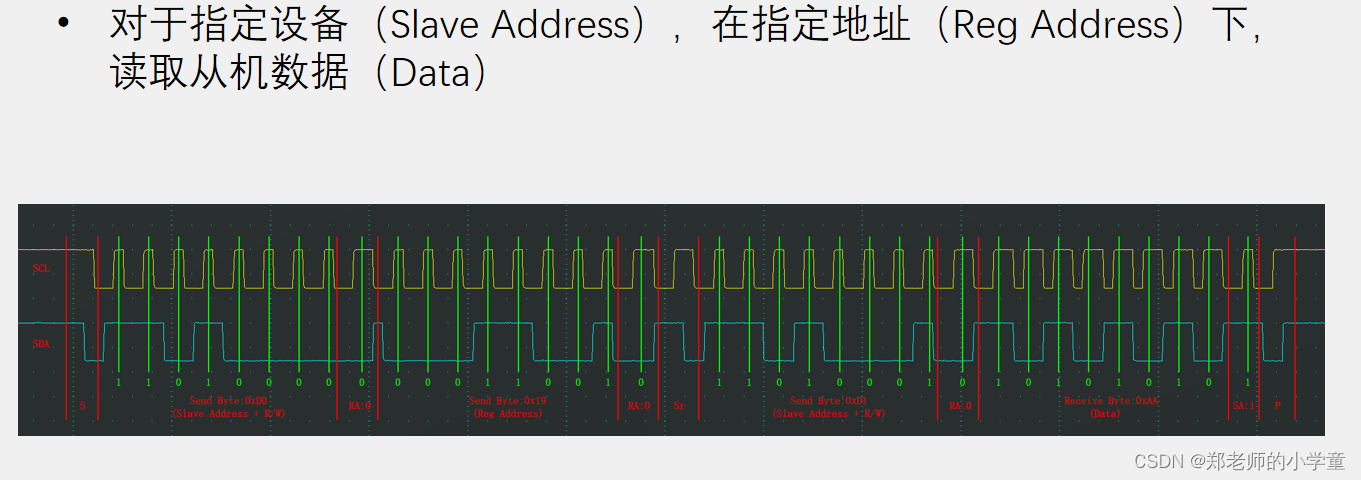
首先最開始仍然是啟動條件,然后發送一個字節進行尋址,這里指定從機地址是1101000,讀寫標志位是0,代表我要進行寫的操作,經過從機應答之后,再發送一個字節,第二個字節用來指定地? ?址,這個數據就寫入到了從機的地址指針里了,也就是說從機接收到這個數據之后,它的寄存器指針就指向了0x19 這個位置,之后我們要寫入的數據,不給他發,而是直接再來個起始條件,這個Sr的意思就是重復起始條件,相當于另起一個時序,因為指定讀寫標志位,只能是跟著起始條件的第一個字節,所以如果想切換讀寫方向,只能再來個起始條件,然后起始條件后重新尋址并且指定讀寫標志位,此時讀寫標志位是1代表我要開始讀了,接著主機接收一個字節,這個字節是不是就是0x19 地址下的數據,這就是指定地址讀,你也可以再加一個停止條件,這樣也行哈,這樣的話就是兩個完整的時序了,先起始寫入地址停止,因為寫入的地址會存在地址指針里面,所以這個地址并不會因為時序的停止而消失,我們就可以再提示讀當前位置停止,這樣兩條時序也可以完成任務,但是I2C協議官方規定的復合格式是一整個數據幀,就是先起始再重復起始再停止,相當于把兩條時序拼接成一條。
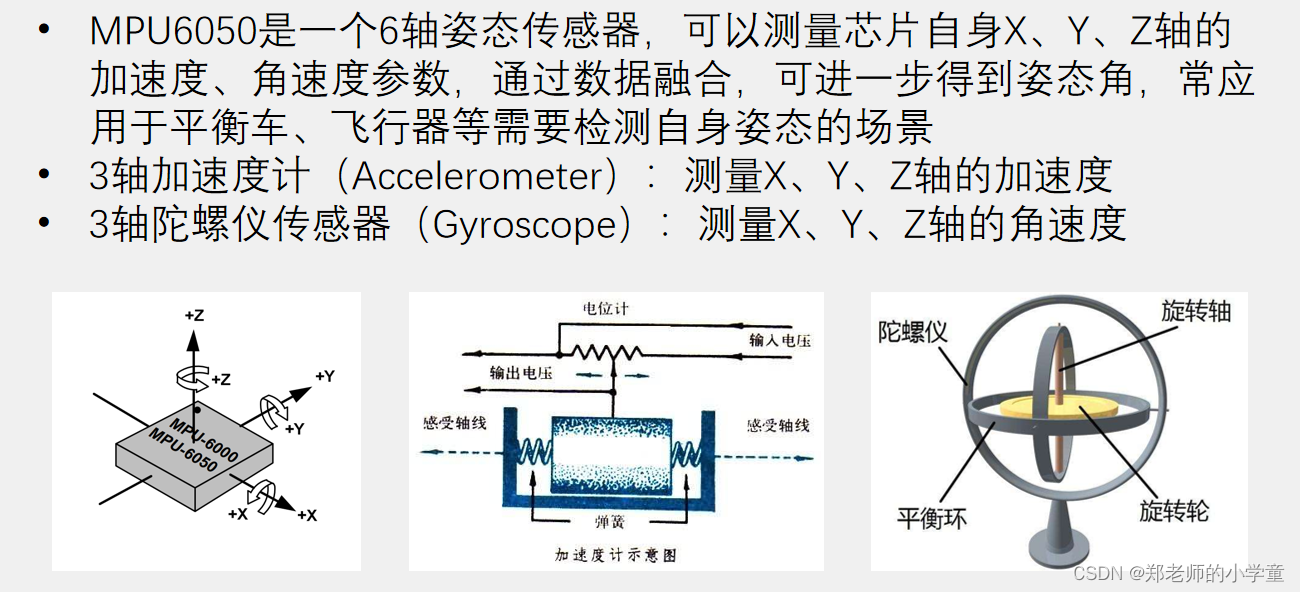
5.MPU6050
5.1 簡介
?5.2 自身參數

芯片進行I2C通信的從機地址,這個可以在手冊里查到,當AD0等于0,地址為1001000,當AD0等于1時,地址為1001001,AD0就是板子引出來的一個引腳,可以調節I2C從機地址的最低位,這里地址是七位的。?如果像這樣用二進制來表示的話,一般沒啥問題,如果在程序中用16進制表示的話,一般會有兩種表示方式,以這個1001000的地址為例,第一種就是單純的把這七位的二進制轉化為16進制,這里1001000低4位和高3位切開轉換,16進制就是0x68(100 1000前面補了個0) ,所以有的地方就說MPU6050的從機地址是0x68 ,然后我們看一下之前I2C通信的時序,這里第一個字節的高7位是從機地址,最低位是讀寫位,所以如果你認為0x68是從機地址的話,在發送第一個字節時,要先把0x68 左移一位,再按位或上讀寫位,讀1寫0,這是認為從機地址是0x68 的操作,當然目前還有另一種常見的表示方式,就是把0x68 左移移位后的數據當做從機地址,0x68 左移1位之后是0xD0 ,那這樣MPU6050的從機地址就是0xD0 ,這時在實際發送第一個字節時,如果你要寫,就直接把0xD0 當做第一個字節;如果你要讀就把0xd0或上0x01 即0xD1當做第一個字節,這種表示方式就不需要進行左移的操作了,或者說這種表示方式是把讀寫位也融入到了從機地址里來,0xD0 是寫地址,0xD1是讀地址,這樣表示的,所以你之后看到有地方說0xD0是MPU6050的從機地址,那它就是融入了讀寫位的從機地址,如果你看到有地方說0x68是MPU6050的從機地址,這也不要奇怪,這種方式就是直接把7位地址轉換16進制得到的,在實際發送第一個字節時,不要忘了先左移一位,再或上讀寫位,這是兩種統計地址的表示方式。
5.3 硬件電路

- ?左上角是一個LDO低壓差線性穩壓器,這部分是供電的邏輯,手冊里介紹這個MPU6050 芯片的VDD供電是2.375~3.46V屬于3.3V供電的設備,不能直接接5V,所以為了擴大供電范圍,這個模塊的設計者就加了個3.3V的穩壓器,輸入端電壓vcc_5v可以在3.3v到5v之間,然后經過3.3伏的穩壓器輸出穩定的3.3伏電壓給芯片端供電,然后這一塊是電源指示燈,只要3.3v端有電,電源指示燈就會亮.
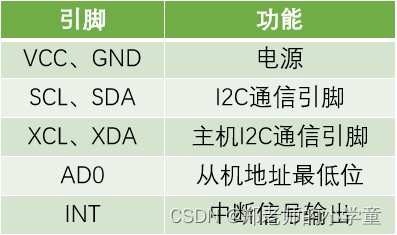
- 左下角是一個八針的排針,有VCC和GND這兩個引腳是電源供電,然后SCL和SDA這兩個引腳是I2C通信的引腳,在這里可以看到,SCL和SDA模塊已經內置了兩個4.7k的上拉電阻了,所以在我們接線的時候,直接把SCL和SDA接在GPIO口就行了,不需要再在外面另外接上拉電阻了,接著下面有XCL和XDA這兩個是芯片里面的主機I2C通信引腳,設計這兩個引腳是為了擴展芯片功能,之前我們說過,MPU6050是一個六軸姿態傳感器,這是九軸姿態傳感器多出的磁力計的作用,另外如果你要制作無人機,需要定高飛行,這時候就還需要增加氣壓計,擴展為十軸提供一個高度信息的穩定參考,所以根據項目要求啊,這個六軸傳感器可能不夠用,需要進行擴展,那這個時候這個XCL和XDA就可以起作用了,XCL和XDA通常就是用于外接磁力計或者氣壓計,當接上磁力計或氣壓計之后,MPU6050的主機接口可以直接訪問這些擴展芯片的數據,把這些擴展芯片的數據讀取到MPU6050 里面,在MPU6050 里面會有DMP單元進行數據融合和姿態解算,如果你不需要按MPU6050 的解算功能的話,也可以把這個磁力計或者氣壓計直接掛載在XCL和XDA這條總線上,因為I2C本來就可以掛載多設備,所以把多個設備都掛載在一起也是沒問題的。下面AD0引腳,這個之前說過,他是從機地址的最低位,接低電平的話七位從機地址就是1001000,接高電平的話七位從機地址就是1001001,這里電路中可以看到有一個電阻默認弱下拉到低電平了,所以引腳懸空的話就是低電平,如果想接高電平,就可以把AD0直接引到VCC,強上拉至高電平。最后一個引腳是INT,也就是中斷輸出引腳,可以配置芯片內部的一些事件來觸發中斷引腳的輸出,比如數據準備好了、I2C主機錯誤等,另外芯片內部還內置了一些實用的小功能、比如自由落體檢測、運動檢測、零運動檢測等,這些信號都可以觸發INT引腳產生電平跳變,需要的話可以進行中斷信號的配置,但如果不要的話,那也可以不配置這個引腳。
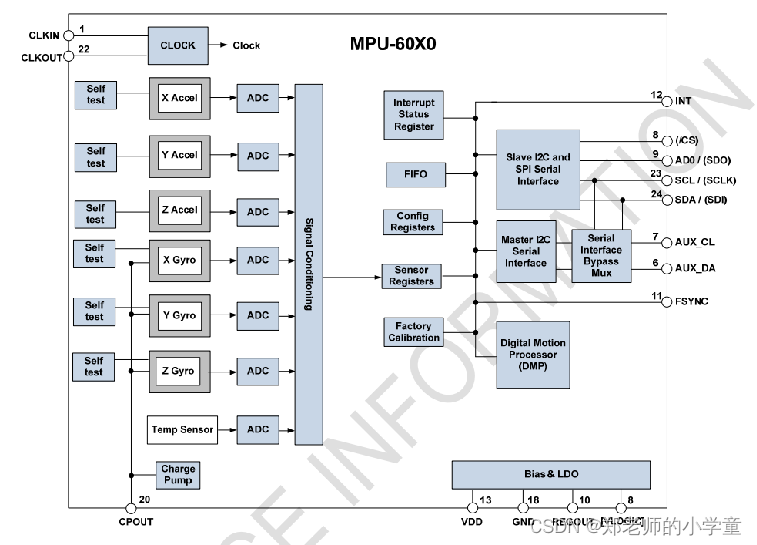
5.4 框圖
-
左上角是時鐘系統,有時鐘輸入腳和輸出腳,不過我們一般使用內部時鐘,硬件電路這里CLKIN直接接了地,CLKOUT沒有引出所以這部分不需要過多關心,然后下面這些灰色的部分就是芯片內部的傳感器,包括x y z軸的陀螺儀陀螺儀,另外這個芯片還內置了一個溫度傳感器,你要是想用它來測量溫度也是沒問題的,那這么多傳感器本質上也都相當于可變電阻,通過分壓后輸出模擬電壓,然后通過ADC進行模數轉換,轉化完成之后呢,這些傳感器的數據統一都放到數據寄存器中,我們讀取數據寄存器就能得到傳感器測量的值了,這個芯片內部的轉換都是全自動進行的,就類似我們之前學的AD連續轉換加DMA轉運,每個ADC輸出,對應16位的數據寄存器,不存在數據覆蓋的問題,我們配置好轉換頻率之后,每個數據就自動以我們設置的頻率刷新到數據寄存器,我們需要數據的時候直接來讀就行
-
接著每個傳感器都有個自測單元self test,這部分是用來驗證芯片好壞的,當啟動自測后,芯片內部就會模擬一個外力施加在傳感器上,這個外力導致傳感器數據會比平時大一些,那如何進行自測呢,我們可以先使能自測讀取數據,再失能自測讀取數據,兩個數據相減得到的數據叫自測響應,芯片手冊里給出了一個范圍,如果自測響應在這個范圍內就說明芯片沒問題,如果不在就說明芯片可能壞了,使用的時候就要小心點,這個是自測的功能。
-
右邊這一大塊就是寄存器和通信接口部分了,中斷狀態寄存器可以控制內部的哪些事件到中斷引腳的輸出,FIFO是先入先出寄存器,可以對數據流進行緩存,我們本節暫時不用,配置寄存器,可以對內部的各個電路進行配置,傳感器寄存器也就是數據寄存器,存儲在各個傳感器的數據,工廠校準這個意思就是內部的傳感器都進行了校準我們不用了解,然后右邊這個數字運動處理器簡稱DMP,還是芯片內部自帶的一個姿態解算的硬件算法,配合官方的DMP庫可以進行姿態解算,因為姿態解算還是比較難的,而且算法也很復雜,所以如果使用了內部的DMP進行姿態解算,姿態解算就會方便一些,暫時不涉及,這個FSYNC是幀同步,我們用不到,最后上面這塊就是通信接口部分,上面一部分就是從機的I2C和SPI通信接口,用于和stm32通信,下面這一部分是主機的I2C通信接口,用于和MPU6050擴展的設備進行通信,這里有個接口旁路選擇器(MUX)就是一個開關,如果撥到上面,輔助的I2C引腳就和正常的I2C引腳接到一起,這樣兩路總線就合在一起了,stm32可以控制所有設備,這時sm32就是大哥MPU6050和這個擴展設備都是stm32的小弟,如果撥到下面,輔助的I2C引腳就由mpu6050控制,兩條I2C總線獨立分開,這時stm32是mpu6050的大哥,MPU6050又是擴展設備的大哥,我們本節課程不會用到這個擴展功能。
5.5 常用寄存器


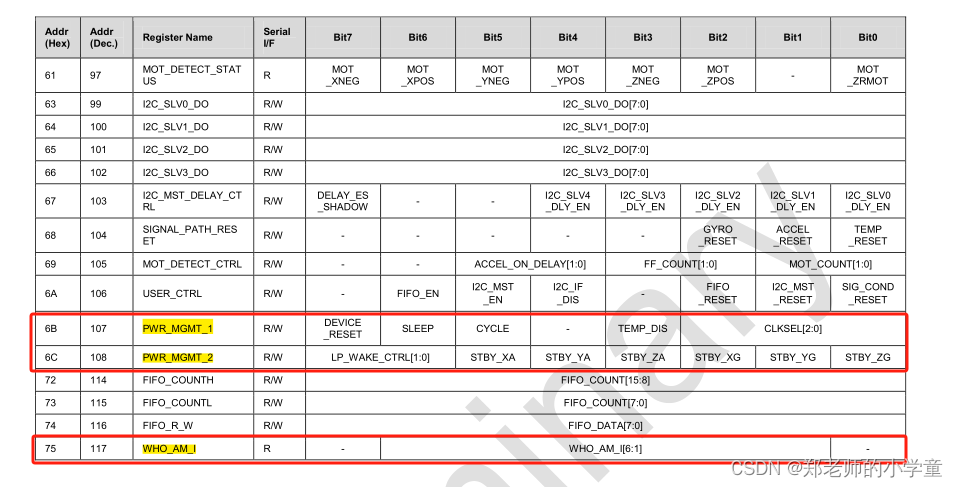
- ?6B(電源管理寄存器1):設備復位:0(不復位) 睡眠模式:0(解除睡眠) 循環模式:0(不需要循環) 無關位:0? 溫度傳感器使能:0? 選擇時鐘:000(內部時鐘)、001(x軸陀螺儀時鐘(推薦))
- 6C(電源管理寄存器2):循環模式喚醒頻率:00 每一個軸的待機位:全給0(不需要待機)
- 19(采樣率分頻):八位決定了數據輸出的快慢 值越小越快 后續程序中給0x09 也就是10分頻
- 1A(配置寄存器):外步同步:000(不需要)? 數字低通濾波器:110(最平滑的濾波)
- 1B(陀螺儀配置寄存器):自測使能:000? 滿量程選擇:11(最大量程)
- 1C(加速度計配置寄存器):自測使能:000? 滿量程選擇:11(最大量程) 高通濾波器:000(不需要)
6.軟件I2C讀寫MPU6050
6.1 接線圖

6.2相關代碼
6.2.1 MyI2C.c
#include "stm32f10x.h" // Device header
#include "Delay.h"/*引腳配置層*//*** 函 數:I2C寫SCL引腳電平* 參 數:BitValue 協議層傳入的當前需要寫入SCL的電平,范圍0~1* 返 回 值:無* 注意事項:此函數需要用戶實現內容,當BitValue為0時,需要置SCL為低電平,當BitValue為1時,需要置SCL為高電平*/
void MyI2C_W_SCL(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue); //根據BitValue,設置SCL引腳的電平Delay_us(10); //延時10us,防止時序頻率超過要求
}/*** 函 數:I2C寫SDA引腳電平* 參 數:BitValue 協議層傳入的當前需要寫入SDA的電平,范圍0~0xFF* 返 回 值:無* 注意事項:此函數需要用戶實現內容,當BitValue為0時,需要置SDA為低電平,當BitValue非0時,需要置SDA為高電平*/
void MyI2C_W_SDA(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue); //根據BitValue,設置SDA引腳的電平,BitValue要實現非0即1的特性Delay_us(10); //延時10us,防止時序頻率超過要求
}/*** 函 數:I2C讀SDA引腳電平* 參 數:無* 返 回 值:協議層需要得到的當前SDA的電平,范圍0~1* 注意事項:此函數需要用戶實現內容,當前SDA為低電平時,返回0,當前SDA為高電平時,返回1*/
uint8_t MyI2C_R_SDA(void)
{uint8_t BitValue;BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11); //讀取SDA電平Delay_us(10); //延時10us,防止時序頻率超過要求return BitValue; //返回SDA電平
}/*** 函 數:I2C初始化* 參 數:無* 返 回 值:無* 注意事項:此函數需要用戶實現內容,實現SCL和SDA引腳的初始化*/
void MyI2C_Init(void)
{/*開啟時鐘*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //開啟GPIOB的時鐘/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //將PB10和PB11引腳初始化為開漏輸出/*設置默認電平*/GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11); //設置PB10和PB11引腳初始化后默認為高電平(釋放總線狀態)
}/*協議層*//*** 函 數:I2C起始* 參 數:無* 返 回 值:無*/
void MyI2C_Start(void)
{MyI2C_W_SDA(1); //釋放SDA,確保SDA為高電平MyI2C_W_SCL(1); //釋放SCL,確保SCL為高電平MyI2C_W_SDA(0); //在SCL高電平期間,拉低SDA,產生起始信號MyI2C_W_SCL(0); //起始后把SCL也拉低,即為了占用總線,也為了方便總線時序的拼接
}/*** 函 數:I2C終止* 參 數:無* 返 回 值:無*/
void MyI2C_Stop(void)
{MyI2C_W_SDA(0); //拉低SDA,確保SDA為低電平MyI2C_W_SCL(1); //釋放SCL,使SCL呈現高電平MyI2C_W_SDA(1); //在SCL高電平期間,釋放SDA,產生終止信號
}/*** 函 數:I2C發送一個字節* 參 數:Byte 要發送的一個字節數據,范圍:0x00~0xFF* 返 回 值:無*/
void MyI2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i ++) //循環8次,主機依次發送數據的每一位{MyI2C_W_SDA(Byte & (0x80 >> i)); //使用掩碼的方式取出Byte的指定一位數據并寫入到SDA線//Byte或上1000 0000等于Byte 接著右移一位 即Byte與上0100 0000 等于ByteMyI2C_W_SCL(1); //釋放SCL,從機在SCL高電平期間讀取SDAMyI2C_W_SCL(0); //拉低SCL,主機開始發送下一位數據}
}/*** 函 數:I2C接收一個字節* 參 數:無* 返 回 值:接收到的一個字節數據,范圍:0x00~0xFF*/
uint8_t MyI2C_ReceiveByte(void)
{uint8_t i, Byte = 0x00; //定義接收的數據,并賦初值0x00,此處必須賦初值0x00,后面會用到MyI2C_W_SDA(1); //接收前,主機先確保釋放SDA,避免干擾從機的數據發送for (i = 0; i < 8; i ++) //循環8次,主機依次接收數據的每一位{MyI2C_W_SCL(1); //釋放SCL,主機機在SCL高電平期間讀取SDAif (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);//若Byte等于1 則與上1000 0000就等于1 若Byte等于0 則與上1000 0000還是為0} //讀取SDA數據,并存儲到Byte變量//當SDA為1時,置變量指定位為1,當SDA為0時,不做處理,指定位為默認的初值0MyI2C_W_SCL(0); //拉低SCL,從機在SCL低電平期間寫入SDA}return Byte; //返回接收到的一個字節數據
}/*** 函 數:I2C發送應答位* 參 數:Byte 要發送的應答位,范圍:0~1,0表示應答,1表示非應答* 返 回 值:無*/
void MyI2C_SendAck(uint8_t AckBit)
{MyI2C_W_SDA(AckBit); //主機把應答位數據放到SDA線MyI2C_W_SCL(1); //釋放SCL,從機在SCL高電平期間,讀取應答位MyI2C_W_SCL(0); //拉低SCL,開始下一個時序模塊
}/*** 函 數:I2C接收應答位* 參 數:無* 返 回 值:接收到的應答位,范圍:0~1,0表示應答,1表示非應答*/
uint8_t MyI2C_ReceiveAck(void)
{uint8_t AckBit; //定義應答位變量MyI2C_W_SDA(1); //接收前,主機先確保釋放SDA,避免干擾從機的數據發送MyI2C_W_SCL(1); //釋放SCL,主機機在SCL高電平期間讀取SDAAckBit = MyI2C_R_SDA(); //將應答位存儲到變量里MyI2C_W_SCL(0); //拉低SCL,開始下一個時序模塊return AckBit; //返回定義應答位變量
}
6.2.2 MyI2C.h
#ifndef __MYI2C_H
#define __MYI2C_Hvoid MyI2C_Init(void);
void MyI2C_Start(void);
void MyI2C_Stop(void);
void MyI2C_SendByte(uint8_t Byte);
uint8_t MyI2C_ReceiveByte(void);
void MyI2C_SendAck(uint8_t AckBit);
uint8_t MyI2C_ReceiveAck(void);#endif
?6.2.3 MPU6050.c
#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C從機地址/*** 函 數:MPU6050寫寄存器* 參 數:RegAddress 寄存器地址,范圍:參考MPU6050手冊的寄存器描述* 參 數:Data 要寫入寄存器的數據,范圍:0x00~0xFF* 返 回 值:無*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{MyI2C_Start(); //I2C起始MyI2C_SendByte(MPU6050_ADDRESS); //發送從機地址,讀寫位為0,表示即將寫入MyI2C_ReceiveAck(); //接收應答MyI2C_SendByte(RegAddress); //發送寄存器地址MyI2C_ReceiveAck(); //接收應答MyI2C_SendByte(Data); //發送要寫入寄存器的數據MyI2C_ReceiveAck(); //接收應答MyI2C_Stop(); //I2C終止
}/*** 函 數:MPU6050讀寄存器* 參 數:RegAddress 寄存器地址,范圍:參考MPU6050手冊的寄存器描述* 返 回 值:讀取寄存器的數據,范圍:0x00~0xFF*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;MyI2C_Start(); //I2C起始MyI2C_SendByte(MPU6050_ADDRESS); //發送從機地址,讀寫位為0,表示即將寫入MyI2C_ReceiveAck(); //接收應答MyI2C_SendByte(RegAddress); //發送寄存器地址MyI2C_ReceiveAck(); //接收應答MyI2C_Start(); //I2C重復起始MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //發送從機地址,讀寫位為1,表示即將讀取MyI2C_ReceiveAck(); //接收應答Data = MyI2C_ReceiveByte(); //接收指定寄存器的數據MyI2C_SendAck(1); //發送應答,給從機非應答,終止從機的數據輸出MyI2C_Stop(); //I2C終止return Data;
}/*** 函 數:MPU6050初始化* 參 數:無* 返 回 值:無*/
void MPU6050_Init(void)
{MyI2C_Init(); //先初始化底層的I2C/*MPU6050寄存器初始化,需要對照MPU6050手冊的寄存器描述配置,此處僅配置了部分重要的寄存器*/MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //電源管理寄存器1,取消睡眠模式,選擇時鐘源為X軸陀螺儀MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //電源管理寄存器2,保持默認值0,所有軸均不待機MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采樣率分頻寄存器,配置采樣率MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPFMPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺儀配置寄存器,選擇滿量程為±2000°/sMPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度計配置寄存器,選擇滿量程為±16g
}/*** 函 數:MPU6050獲取ID號* 參 數:無* 返 回 值:MPU6050的ID號*/
uint8_t MPU6050_GetID(void)
{return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}/*** 函 數:MPU6050獲取數據* 參 數:AccX AccY AccZ 加速度計X、Y、Z軸的數據,使用輸出參數的形式返回,范圍:-32768~32767* 參 數:GyroX GyroY GyroZ 陀螺儀X、Y、Z軸的數據,使用輸出參數的形式返回,范圍:-32768~32767* 返 回 值:無*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t DataH, DataL; //定義數據高8位和低8位的變量DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //讀取加速度計X軸的高8位數據DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //讀取加速度計X軸的低8位數據*AccX = (DataH << 8) | DataL; //數據拼接,通過輸出參數返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //讀取加速度計Y軸的高8位數據DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //讀取加速度計Y軸的低8位數據*AccY = (DataH << 8) | DataL; //數據拼接,通過輸出參數返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //讀取加速度計Z軸的高8位數據DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //讀取加速度計Z軸的低8位數據*AccZ = (DataH << 8) | DataL; //數據拼接,通過輸出參數返回DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //讀取陀螺儀X軸的高8位數據DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //讀取陀螺儀X軸的低8位數據*GyroX = (DataH << 8) | DataL; //數據拼接,通過輸出參數返回DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //讀取陀螺儀Y軸的高8位數據DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //讀取陀螺儀Y軸的低8位數據*GyroY = (DataH << 8) | DataL; //數據拼接,通過輸出參數返回DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //讀取陀螺儀Z軸的高8位數據DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //讀取陀螺儀Z軸的低8位數據*GyroZ = (DataH << 8) | DataL; //數據拼接,通過輸出參數返回
}
6.2.4 MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_Hvoid MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);#endif
6.2.5 MPU6050_Reg.h
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H#define MPU6050_SMPLRT_DIV 0x19 //采樣率分頻
#define MPU6050_CONFIG 0x1A //配置寄存器
#define MPU6050_GYRO_CONFIG 0x1B //陀螺儀配置寄存器
#define MPU6050_ACCEL_CONFIG 0x1C //加速度計配置寄存器#define MPU6050_ACCEL_XOUT_H 0x3B //加速度寄存器X軸的高八位
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48#define MPU6050_PWR_MGMT_1 0x6B //電源管理寄存器1
#define MPU6050_PWR_MGMT_2 0x6C //電源管理寄存器2
#define MPU6050_WHO_AM_I 0x75#endif
6.2.6 main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"uint8_t ID; //定義用于存放ID號的變量
int16_t AX, AY, AZ, GX, GY, GZ; //定義用于存放各個數據的變量int main(void)
{/*模塊初始化*/OLED_Init(); //OLED初始化MPU6050_Init(); //MPU6050初始化/*顯示ID號*/OLED_ShowString(1, 1, "ID:"); //顯示靜態字符串ID = MPU6050_GetID(); //獲取MPU6050的ID號OLED_ShowHexNum(1, 4, ID, 2); //OLED顯示ID號while (1){MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ); //獲取MPU6050的數據OLED_ShowSignedNum(2, 1, AX, 5); //OLED顯示數據OLED_ShowSignedNum(3, 1, AY, 5);OLED_ShowSignedNum(4, 1, AZ, 5);OLED_ShowSignedNum(2, 8, GX, 5);OLED_ShowSignedNum(3, 8, GY, 5);OLED_ShowSignedNum(4, 8, GZ, 5);}
}
6.3 現象
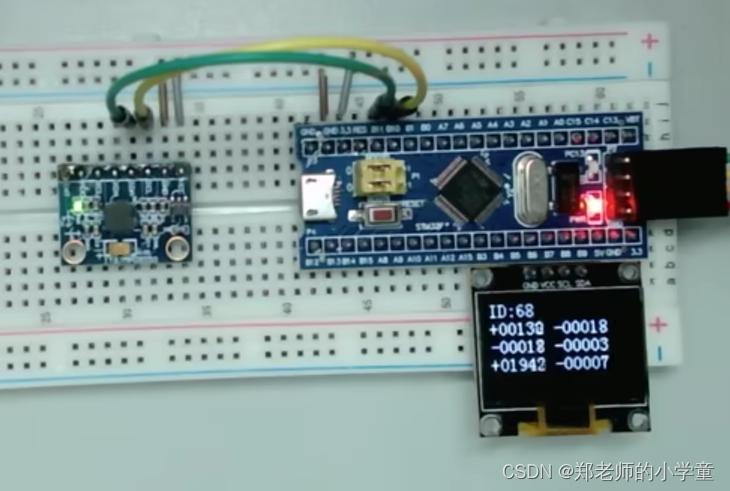 OLED第一行顯示MPU6050的ID號 下面三行分別是陀螺儀和加速度計X、Y、Z軸的的變化數據
OLED第一行顯示MPU6050的ID號 下面三行分別是陀螺儀和加速度計X、Y、Z軸的的變化數據






)
)
分析筆記)


)


--單調隊列滑動窗口與連續子序列的最大和)
——創建(create)角色腳本(panel)——UserHandler(收)+CreateClick(發)——創建發包!)

ALGO-995 24點)

)