文章目錄
- 前言
- 連續分配
- 單一連續分配
- 分區式分配
- 固定分區分配
- 動態分區分配
- 可重定位分區分配
- 離散分配
- 分段
- 分頁
- 多級頁表
- 快表(TLB)
- 段頁式
- Linux
前言
Linux 內存管理 | 虛擬內存管理:虛擬內存空間、虛擬內存分配
Linux 內存管理 | 物理內存、內存碎片、伙伴系統、SLAB分配器
在之前的兩篇博客中,分別介紹了虛擬內存與物理內存的管理方式,那么對于操作系統來說,它是如何管理它們兩個之間的關系的呢?如何進行地址的映射呢?
內存的分配方式有兩種:
-
連續分配: 每個進程分配一段地址空間連續的內存空間。
連續內存分配的方式有:- 單一連續分配
- 分區式分配
- 固定分區分配
- 動態分區分配
- 可重定位分區分配
-
離散分配: 允許將一個進程分散的分配到許多不相鄰的分區中,程序全部裝入內存。
現在用到的更多的是離散的分配方式,因此我們簡單介紹一下連續分配,再對離散分配加以詳解。
連續分配
單一連續分配
使用這種內存分配方式,內存空間會被分成 系統區 和 用戶區 兩部分,系統區僅提供給OS使用,系統區外的用戶區提供給用戶使用。
特點:
- 只適用于 單道程序 的情況。
- 若用戶作業比用戶區大,則無法運行
- 若用戶作業比用戶區小,則造成內存浪費
- 設置界限寄存器,限制用戶程序訪問操作系統
單道程序的特點:
- 資源獨占性: 任何時候,位于內存中的程序可以使用系統中的一切資源,不可能有其他程序與之競爭。
- 執行的順序性: 內存中只有一個程序,各個程序是按次序執行的。在做完一個程序的過程中,不可能夾雜進另一個程序執行。
- 結果的可再現性: 只要執行環境和初始條件相同,重復執行一個程序,獲得的結果總是一樣的。
- 運行結果的無關性: 程序的運行結果與程序執行的速度無關。系統中的作業以串行的方式被處理,CPU、內存的利用率低。
分區式分配
固定分區分配
固定分區分配是最簡單的一種可以運行在 多道程序 的存儲管理方式。
多道程序: 是指在計算機內存中同時存放幾道相互獨立的程序,使它們在管理程序控制下,相互穿插運行,兩個或兩個以上程序在計算機系統中同處于開始到結束之間的狀態, 這些程序共享計算機系統資源。當然,對于一個單CPU系統來說,程序同時處于運行狀態只是一種宏觀上的概念,他們雖然都已經開始運行,但就微觀而言,任意時刻,CPU上運行的程序只有一個。
基本原理:
- 將內存空間劃分為若干個固定大小的分區(大小可以不等);
- 每個分區中只可以裝入一道作業;
- 當有空閑分區時,選擇一個適當大小的作業裝入該分區;
- 當作業結束時,釋放該分區。
缺點:
- 程序的大小受分區大小的限制;程序數受分區數限制;
- 每個分區都有可能產生 內部碎片,引起內存的浪費。
動態分區分配
基本思想:
- 作業要求裝入內存時,依照作業的大小劃分分區。
- 每個分區容納一個進程。
可變分區的管理與組織方式:
- 表格法:將內存按是否空心啊分別存在 空閑分區表 和 已分配分區表 中。管理簡單,但是需要占用一部分內存空間。

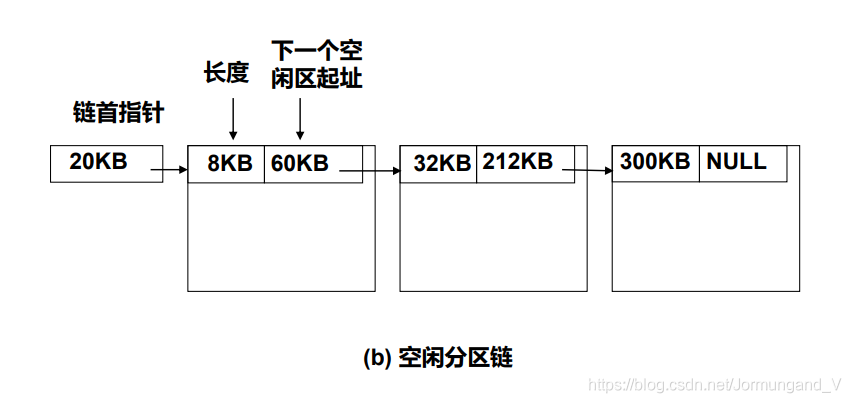
- 鏈表法:維護一個鏈首指針,每個空閑區在首地址記錄兩個數據:本空閑區的大小、下個空閑區的起始地址。
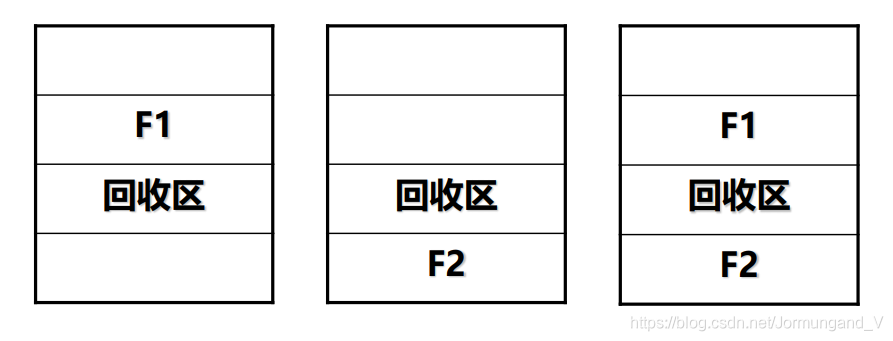
動態分區分配的內存回收方式: - 上鄰空閑區(F1):合并,改大小
- 下鄰空閑區(F2):合并,改大小,首址。
- 上、下鄰空閑區(F1、F2):合并,改大小。
- 不鄰接,則建立一新表項。
動態分配分區內存分配算法:
- 首次適應算法: 將空閑分區按 地址順序 排列,進行內存分配時,從低地址開始順序查找,分配第一個足夠大的分區。
- 優點:優先分配低地址部分的空閑分區,保留高地址部分;
- 缺點: 在低址部分集中了許多小分區,難以利用。
- 循環首次適應算法: 首次適應算法的改進版本。將空閑分區按地址順序構成循環鏈表,進行內存分配時,不再從鏈首開始查找,而是從 上次找到的空閑分區的下一個空閑分區 開始查找,循環查找。
- 優點:內存中的空閑分區分布均勻,比起首次適應算法減少了查找空閑分區時的開銷;
- 缺點:缺乏大的空閑分區。
- 最佳適應算法: 空閑分區按大小 遞增排序 構成隊列,從隊列頭開始查找,當找到第一個滿足要求的空閑區時,則停止查找。
- 優點:找到的空閑分區最接近要求的大小;
- 缺點:會產生非常小的碎片,難以利用。
- 最差適應算法: 空閑分區按大小遞增排序構成隊列,查找最大的空閑區。與上面三個同屬 順序搜索法 。
- 優點:剩余的分區空間最大;
- 缺點:在空間利用率方面較差。
可重定位分區分配
假設現在有這樣一個情況,用戶內存空間中有幾個較小的空閑分區,但是現在有一個作業請求連續的內存空間,這幾個較小的空閑分區任何一個都不能單獨滿足請求空間的大小。 現在一種可行的辦法就是:移動內存,使所有空閑區域合并為一整塊空閑區域。
這種通過移動內存中的作業位置,將原來分散的小分區拼接成一個大分區的思想就是 緊湊 。 說的直白一點,可重定位分區分配就是 動態分區分配+緊湊 。

動態重定位的實現:
作業裝入內存后的所有地址都是相對地址,在程序將要執行的時候,才會將相對地址轉換為物理地址。為了不影響指令執行的速度,系統中增設了一個 重定位寄存器(即段寄存器、基址寄存器) ,用它來存放程序(數據)在內存中的起始地址。
程序真正執行時訪問的地址是 重定位寄存器中的地址+相對地址 。
離散分配
分段
為了簡化地址管理,所以將虛擬內存空間中的 虛擬內存 按照其邏輯劃分為代碼段、數據段、堆段、棧段幾部分。編譯、連接、加載過程都以段為單位。

段的特點:
- 虛擬內存空間是段的集合。
- 每個段都有其名稱和長度。
- 地址是由段名(段號)和段內偏移構成。
地址結構:
- 虛擬地址是二維的:
[段號,段內位移]。 - 32位地址結構中,
- 段號s:16位表示,216 個段
- 段內位移d:16位表示,每段最大長度是64KB。

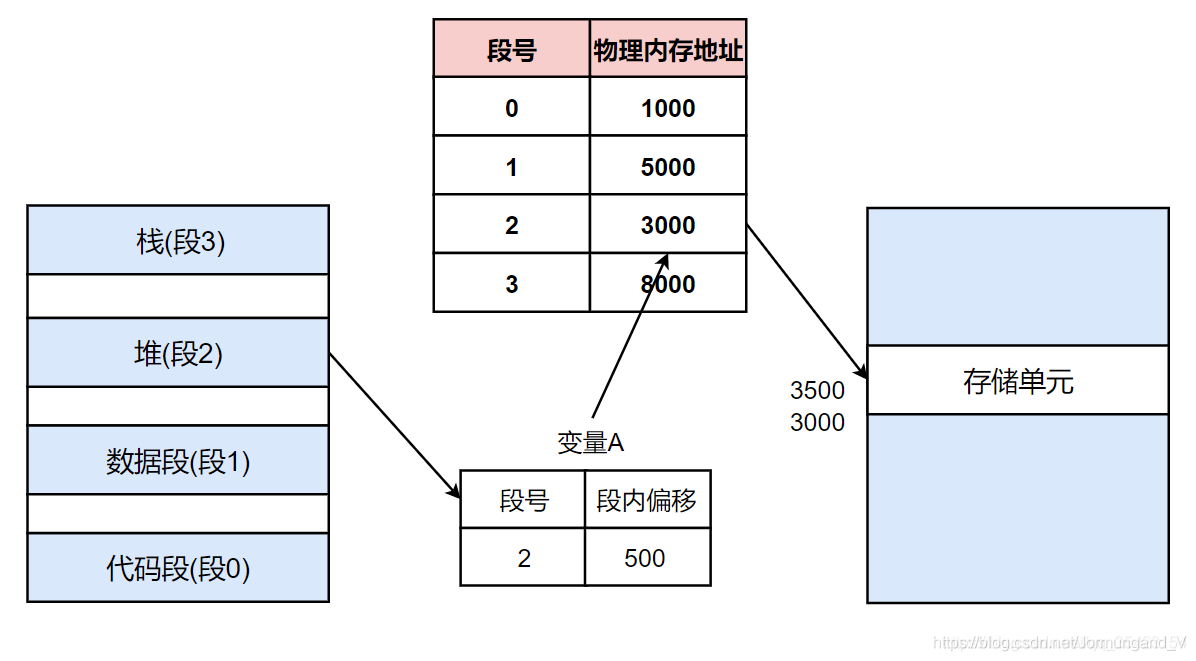
通過 段寄存器 中的 段表 ,將虛擬地址與物理地址進行映射。段表由三部分組成:
- 段號:用于區別每個段。
- 段基址(segment base):該段在物理內存中的首地址。
- 段長(segment limit ):記錄該段的實際長度。

因此虛擬地址與物理地址的轉換方式如下:
- 根據虛擬地址中的段號查詢段表,得到對應的段的物理內存起始地址;
- 物理內存起始地址加上段內偏移,即為其對應的物理地址。
分段存儲方式解決了兩個問題 —— 地址空間不隔離 和 程序運行的地址無法確定。但還存在 內存使用效率低 的問題。內存使用效率低主要是因為兩個原因造成的:內存碎片 和 內存交換的效率低 。
內存碎片問題
例如我們有 1G 的物理內存,倘若我們運行了 512M 的程序A,接著運行了 128M 的程序B,128M 的程序C。剩余內存為 256M 。

倘若我們此時結束程序B,釋放內存,此時總剩余空間為 384M 。

倘若我們此時需要運行 300M 的進程D,但是這時候就會因為剩余空間不連續,導致我們的程序無法運行,這也就是我們常說的 內存外碎片 問題。
那么如何解決這個問題呢?這就會使用到類似于 緊湊 的思想。先將程序C寫入硬盤的 SWAP分區 (交換分區,用于內存和硬盤的空間交換)。緊接著再將其從硬盤中讀取回來,讓其緊挨著程序A的那塊內存,這樣就能保證后面的空閑內存都是連續的了。
內存交換效率低
由于分段對物理內存的映射是以 程序 為單位,按照其邏輯進行分段映射,如果我們的內存不足,那么被換入換出到硬盤中的都是整個程序,這樣就必然會造成大量的磁盤訪問操作,總所周知,磁盤IO的速度特別慢,因此就會嚴重影響我們的訪問速度。
而且,當一個程序在運行時,在某個時間段內,它只是 頻繁地用到了一小部分數據 ,也就是說程序中的很多數據其實在一個時間段內都是不會被用到的。因此我們將整個程序裝入內存其實是對內存的一種浪費。
分頁
總結一下,分段技術仍未解決的問題有:
- 雖然分段式存儲方式不畏懼 內存外碎片,但將內存中的數據暫時寫入到硬盤中,之后再重新寫回來這樣的換入換出操作在程序很大時是很廢時間的。值得一提的是,兩者都無法擺脫 內碎片 的桎梏。
- 而且分段需要將程序全部裝入內存,這就對程序的大小有了限制——不能超過剩余空閑內存的大小。
而分頁技術解決上述兩個問題的方法是:
- 使用頁為單位后,即使我們還是需要進行磁盤IO,但是由于我們交換的容量僅僅只有幾個頁,所以也不會花費過多的時間。
- 分頁技術下并不需要將程序整個裝入內存。在建立了虛擬內存空間后并不會直接分配物理內存,而是在程序運行中需要訪問物理內存的時候,再將其加載進內存中。所以如果在頁表中查找不到時,此時就會由內核的 請求分頁機制 產生 缺頁中斷 ,然后進入 內核態 中分配物理內存、更新進程頁表,最后再返回用戶態,恢復進程的運行。
基本概念:
- 幀/物理塊/頁框(frame): 物理內存分為固定大小的塊。
- 頁(page): 邏輯內存分為同樣大小的塊,在
Linux中,一頁是4KB。 - 頁表(page table):
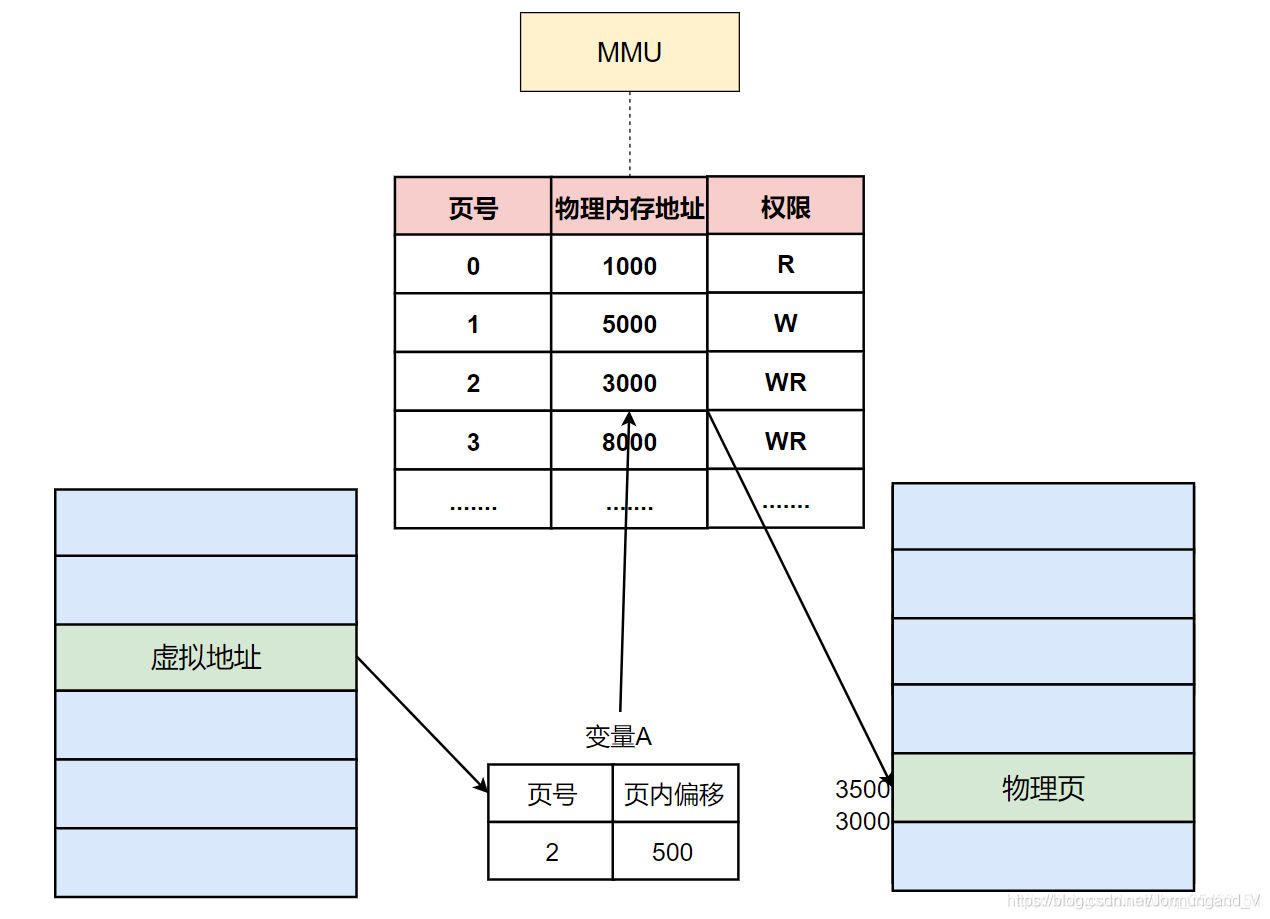
MMU(內存管理單元)中的頁面映射表,記錄了 頁 和 頁框 的映射關系。
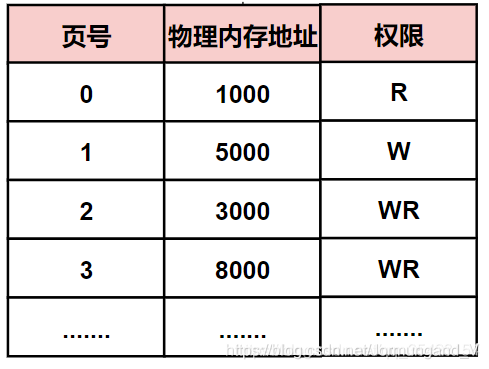
頁表中不僅保存了頁號,物理內存地址,還保留了該物理頁的 訪問權限 ,用以實現對頁的訪問控制。
在分頁機制下,虛擬地址由 頁號 以及 頁內偏移 組成
因此在分頁機制下,虛擬地址與物理地址的轉換方式如下:
- 根據虛擬地址中的頁號查詢頁表,獲得對應的頁的物理內存起始地址;
- 物理內存起始地址加上頁內偏移,即為其對應的物理地址。
多級頁表
在上面所介紹的 頁表 有一個非常致命的缺點,就是空間占用大。
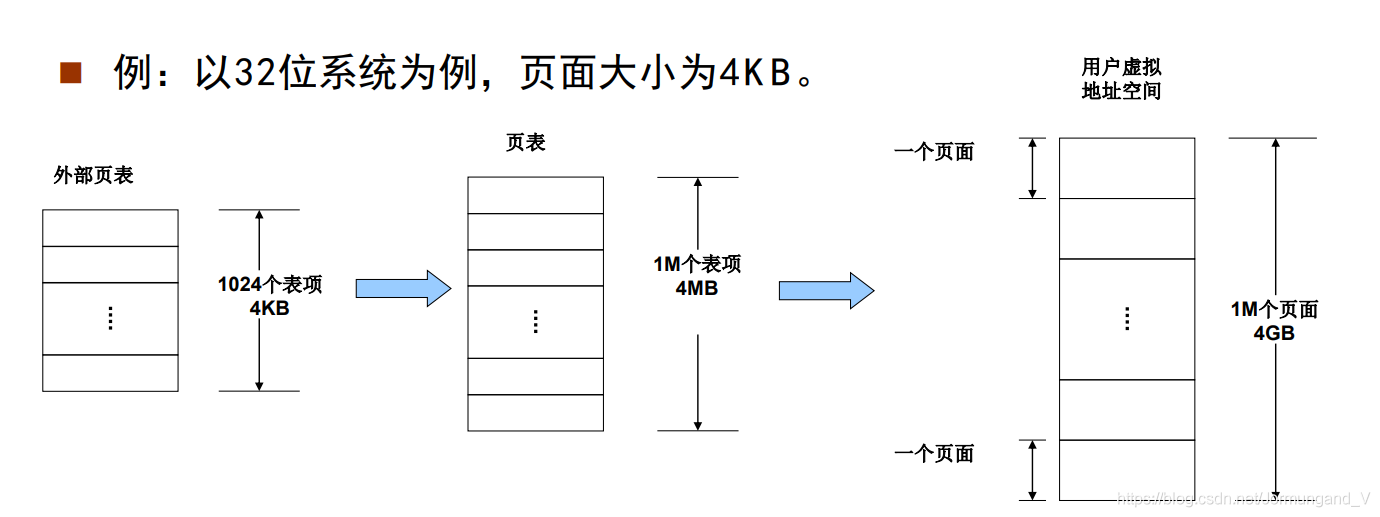
在 Linux 中,可以并發的執行多個進程,而每個進程都有其自己的虛擬內存空間,那么也自然都有自己獨有的頁表。在32位Linux系統下,我們的虛擬內存空間的大小為 4G ,而每頁的大小為 4K ,這也就意味著我們至少有 220 個內存頁,倘若每個頁表項為 4Byte ,那么每個頁表大小也至少為 4M 。
倘若我們此時并發了兩百個進程,那么占用則高達 800M ,即使對于如今的操作系統而言,這個數字也是非常龐大的,因為并發數百個進程是非常常見的情況,更別提64位的操作系統,隨著尋址范圍的增加,頁表將更為龐大。
為了解決這個問題,就引入了多級頁表。
我們將 一級頁表 再進行分頁,分成 1024 個 二級頁表 ,并且每個 二級頁表 中存有 1024 個頁表項,形成如下的 二級分頁 的結構。

對于已分配的頁表項,如果存在最近一定時間未訪問的頁表,在物理內存緊張的情況下,操作系統會將頁面換出到硬盤,也就是說不會占用物理內存。
如果某個一級頁表的頁表項沒有被用到,也就不需要創建這個頁表項對應的二級頁表了,即可以在需要時才創建二級頁表。
如果一級頁表所有表項都被用到,那么此時二級頁表大小為
4M(1024 * 4K),假設我們只是用了一級頁表的20%。
在這種情況下,頁表所占用的物理內存就只有 4K(一級頁表大小) + 20% * 4M(存在的二級頁表) ,即 0.804M ,比起只用了二級頁表的 4M (一級頁表沒有用到的表項不用創建對應的二級頁表,因此此時存在的二級頁表共 20% * 4M ,但單極頁表時,二級頁表必須建滿 4M),大大的節約了內存。
而在64位系統中,兩級頁表是肯定不夠用的,因此又演變成了四級目錄:
- 全局頁目錄項 PGD
- 上層頁目錄項 PUD
- 中間頁目錄項 PMD
- 頁表項 PTE

快表(TLB)
多級頁表雖然解決了空間占用大的問題,但是由于其復雜化了地址的轉換,因此也帶來了 大量的時間開銷 ,使得地址轉換速度減慢。
解決這個問題最簡單的方式就是降低查詢頁表的頻率,那么如何實現呢?這時候就需要用到 緩存 的技術
對于熱點資源,我們可以將其提前緩存下來,到以后使用時就可以直接到緩存中查找。對于操作系統來說,也是這么一個道理。
在操作系統中,這個緩存就是 CPU 中的 TLB ,也就是我們通常所說的 快表 。我們將 最常訪問的幾個頁表項存儲到 TLB 中 ,在之后進行尋址時, CPU 就會先到 TLB 中進行查找,如果沒有找到,這時才會去查詢頁表。
段頁式
雖然分段和分頁各有優缺點,但他們直接并不是對立的,所以如今大部分的內存管理方式,都是將分段與分頁相結合,也就是我們常說的段頁式。
它的原理非常簡單,就是先對 虛擬內存空間進行分段管理,然后再對每一個段進行分頁管理。 如下圖:

所以此時的虛擬地址結構,就由 段號、段內頁號、頁內偏移 所組成。此時對于每個進程來說,都會建立一個段表,而對于段表中的每一個段,又會再分別建立一個頁表:


以此時的虛擬地址轉換為物理地址,就需要以下三個步驟:
- 訪問段表,得到頁表的起始地址;
- 訪問頁表,得到物理頁的起始地址;
- 訪問物理頁,加上頁內偏移,得到實際的物理地址。
這種方法雖然增加了系統開銷以及硬件成本,但是內存的利用率得到了巨大的提升。
Linux
由于硬件問題的限制,Linux 內存主要采用的是頁式內存管理,但同時也不可避免地涉及了段機制。
在往常的機制中,地址的轉換流程如下:

但是在 Linux 中,并沒有邏輯地址這一說(所有段起始地址相同),因為其將段機制進行了弱化,此時段只用于進行訪問控制以及內存保護。
Linux 系統中的每個段都是從 0 地址開始的整個 4GB 虛擬空間(32 位環境下),也就是所有的段的起始地址都是一樣的。
這意味著,Linux 系統中的代碼,包括操作系統本身的代碼和應用程序代碼,所面對的地址空間都是線性地址空間(虛擬地址),這種做法相當于屏蔽了處理器中的邏輯地址概念,段只被用于訪問控制和內存保護。
調用))
【標準流和其文件描述符、fwrite函數、perror函數】)







| 數據類型、常用命令一覽、庫的操作、表的操作)


| 表的增刪查改、聚合函數(復合函數)、聯合查詢)



:模板基礎:函數模板、類模板、模板推演成函數的機制、模板實例化、模板匹配規則)

:非類型模板參數,模板特化,模板的分離編譯)
