問題描述
對于機器人剛性碰撞任務,阻抗控制可以有效地提高機器人的適應性和穩定性。
在剛性碰撞任務中,機器人在接觸外部物體時需要快速適應并調整自身的運動軌跡和速度,以實現精確的操控和穩定的交互。阻抗控制可以通過調整機器人的阻抗參數,改變機器人對外部力的響應特性和適應能力,從而更好地應對剛性碰撞任務中的各種挑戰。
在裝配線中,機器人需要準確地操控和組裝各種零部件,包括不同形狀、大小和材質的物體。通過采用阻抗控制,機器人可以更好地適應各種外部條件和變化,提高操控的準確性和穩定性,從而提高生產效率和產品質量。

此外,阻抗控制還可以幫助機器人更好地應對外部干擾和沖擊。例如,在機器人在執行搬運任務時,可能會遇到不穩定的路面條件或其他外部干擾,導致機器人的運動軌跡和速度發生變化。通過采用阻抗控制,機器人可以更好地適應這些變化,保持穩定的運動狀態和任務執行能力。
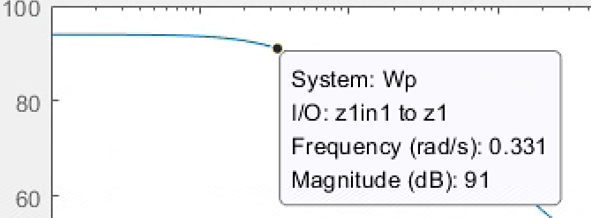
1e4/(0.1*s^2+1*s+1)
![]()

![]()

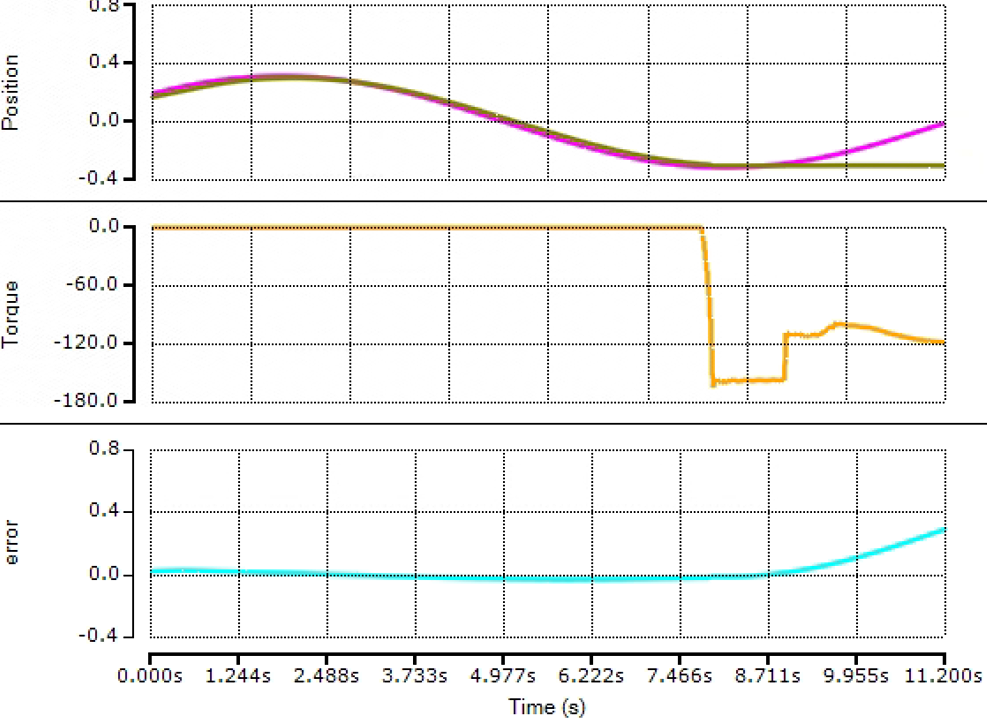
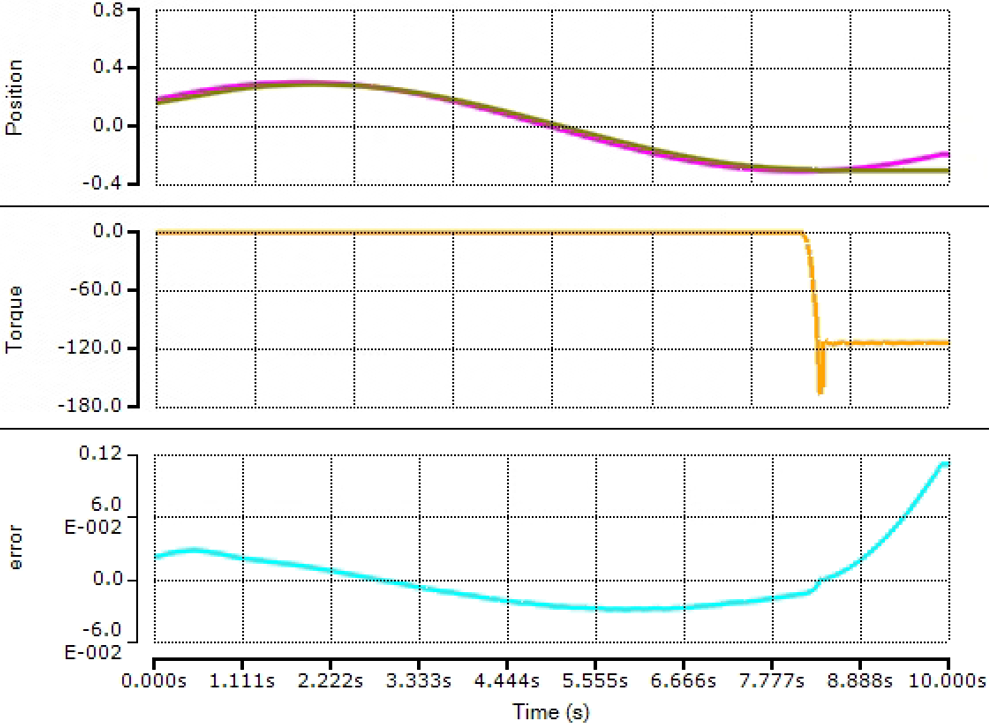
5e4/(0.1*s^2+3*s+1)


![]()







)








)

——Pattern Recognition (2))
