隨著計算機視覺和圖像處理技術的發展,車輛檢測與識別已經成為智能交通系統中的一個重要研究方向。傳統圖像處理方法通過對圖像進行預處理、特征提取、分類與識別,提供了一種無需復雜深度學習模型的解決方案。本研究基于MATLAB平臺,采用傳統圖像處理技術,提出了一種新的車輛車型識別與分類方法。通過背景差分、圖像灰度化、二值化、形態學處理等多種傳統圖像處理技術,對車輛圖像進行處理,提取車輛的特征信息。進一步地,通過對圖像中車身區域的分析,結合車輛占比和邊界檢測等參數,對車輛進行分類。實驗結果表明,該方法能夠有效地從交通場景中分離出車輛,并實現較為準確的車型分類,且計算效率較高,適合實際交通監控系統中的應用。相比于基于深度學習的復雜方法,本研究提供了一種更為簡便且高效的車輛識別與分類方案。
作者:張家梁(自研改進)
引言
隨著城市化進程的加速,交通管理成為了城市運行中日益重要的一個環節。尤其是在智能交通系統(ITS)的發展中,車輛檢測與識別技術的研究和應用對交通流量監控、車牌識別、智能停車系統等領域產生了深遠的影響。傳統的車輛識別方法主要依賴于圖像處理技術,這些方法通常包括背景建模、邊緣檢測、特征提取以及機器學習分類器等步驟。與深度學習方法相比,傳統圖像處理方法在計算資源上更加節省,且在某些應用場景中,尤其是計算資源有限的設備上,仍然具有廣泛的應用前景。
本研究基于MATLAB平臺,采用傳統圖像處理技術對車輛進行識別與分類。傳統圖像處理技術包括圖像去噪、灰度轉換、二值化、形態學操作等,能夠有效提取出車輛的形態特征。通過這些技術,可以實現車輛與背景的分離,并基于車輛的大小、形狀以及車身占比等特征進行車型分類。在實際應用中,這些方法具有較強的實時性,能夠滿足交通監控系統對車輛檢測與識別的需求。
本論文的目標是提出一種基于傳統圖像處理技術的車輛車型識別與分類方法,并通過大量的實驗數據驗證其有效性。與基于深度學習的車輛識別方法相比,本方法在算法復雜度和計算資源方面具有明顯優勢,尤其適用于實時性要求較高且資源有限的交通監控環境。
系統架構
1.系統概述
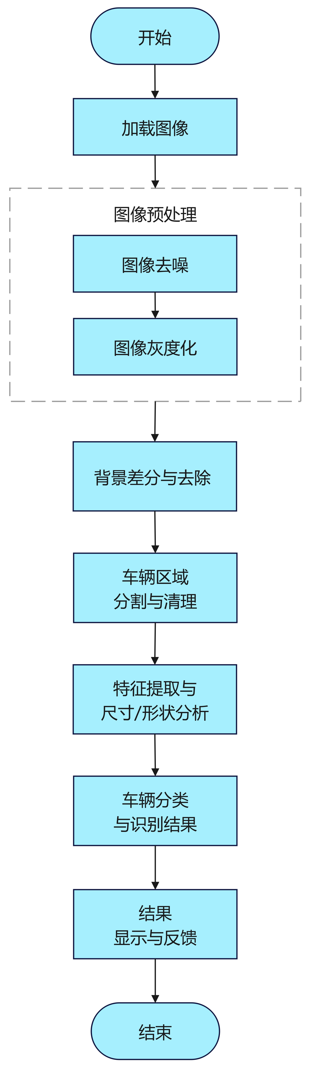
本系統基于MATLAB平臺,利用傳統的圖像處理技術來識別和分類車輛車型。系統的目標是通過圖像處理的各個環節,將輸入的交通場景圖像進行處理,并從中識別出車輛并進行分類。系統的主要組成部分包括圖像采集模塊、圖像預處理模塊、車輛分割模塊、特征提取與分類模塊、以及結果輸出模塊。
系統的核心模塊包括:
圖像采集模塊:獲取交通監控圖像,支持用戶上傳或實時監控。
圖像預處理模塊:去噪、灰度化、背景差分,提取車輛。
車輛分割模塊:通過差分分離車輛與背景,清理噪聲,精確分割車輛。
特征提取與分類模塊:提取形態特征并根據尺寸、形狀分類車輛。
結果輸出模塊:顯示分類結果,提供實時反饋。
2.系統流程圖
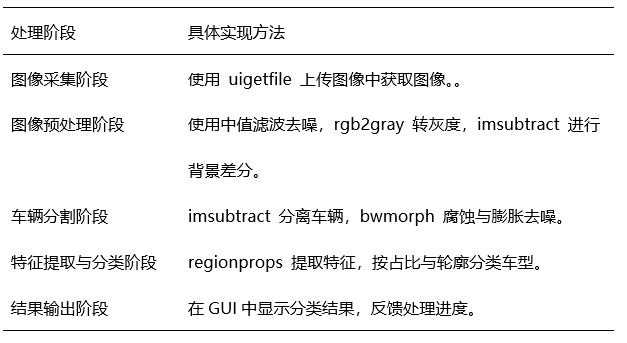
研究方法
本研究采用傳統的圖像處理技術來實現車輛的識別與分類,以下是按照處理階段詳細的具體實現方法:
實驗結果
從系統的實驗結果中,能夠看到不同類型的車輛(如中型車、小型車和公交車)在經過圖像預處理和分類步驟后,能夠準確地識別出車型。每張圖像處理后的 分類結果 顯示了不同車型的識別結果,如:
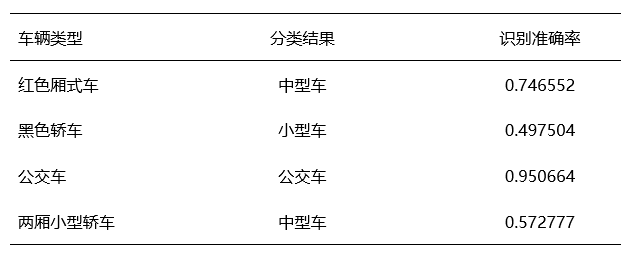
分類準確率與車型類型的關系:
準確率較高的車型:如公交車(準確率 0.950664)由于其尺寸較大、形狀明顯,因此系統能夠較為容易地進行準確分類。
準確率較低的車型:如小型轎車(準確率 0.497504),其尺寸較小,且可能與背景較為相似,導致系統識別的難度增加,準確率相對較低。
識別結果的挑戰與局限性:
小型車輛的識別難度:由于小型車輛在圖像中占據的像素較少,且其外形較為簡潔,系統在處理時可能面臨一些挑戰。部分小型車的分類結果相對較低,可能是由于這些車輛與背景的對比度較低,或者車輛與背景有較強的相似性。
復雜背景的影響:雖然圖像差分有效去除了背景,但如果圖像中存在強烈的光照變化或復雜背景,可能會對分類準確性產生影響,特別是在動態交通環境下。
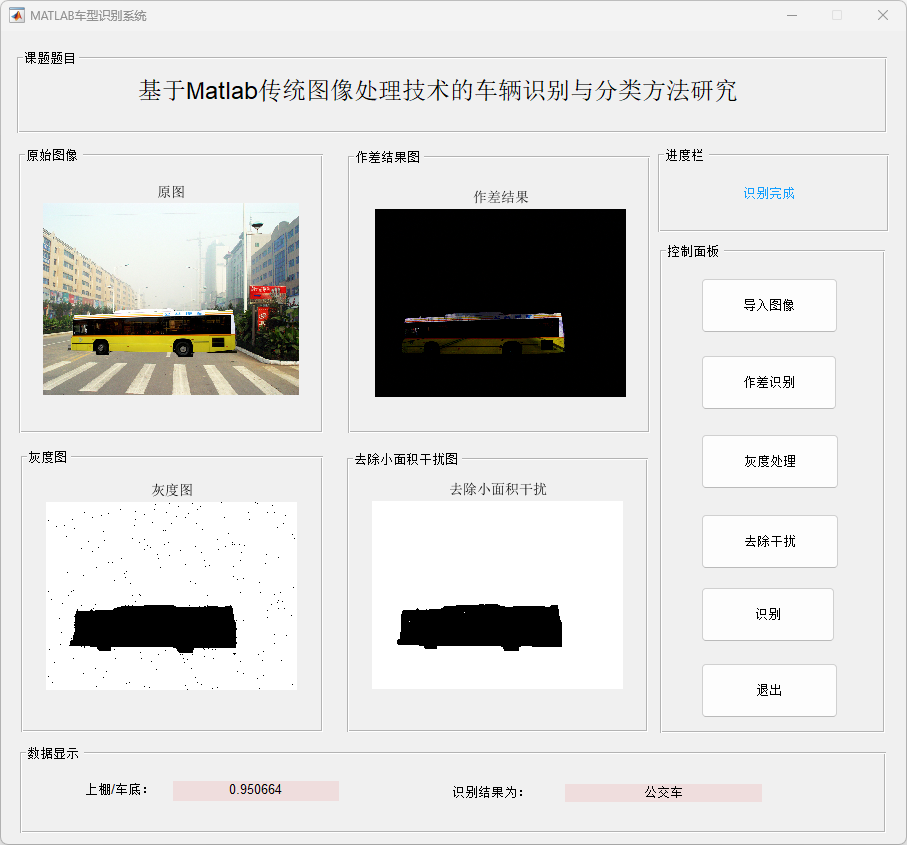
1.實驗過程
圖像 1:原始圖像(紅色廂式車)。

圖像 2:作差結果圖(背景去除)。

圖像 3:去除干擾后的圖像(清晰輪廓)。

圖像 4:分類結果圖(識別為“中型車”)。

2.實驗結果
圖像 1:分類結果為“中型車”。

圖像 2:分類結果為“小型車”。

圖像 3:分類結果為“公交車”。
圖像 3:分類結果為“中型車”。

該系統結合了圖像處理與模式識別技術,通過實時處理和分類,能夠有效地識別并區分不同類型的車輛。圖形用戶界面讓用戶能夠直觀地查看每個步驟的處理結果,提升了交通監控效率。
系統實現
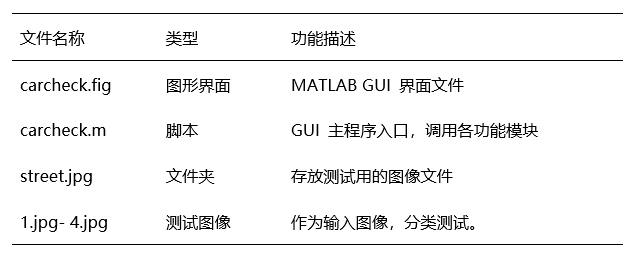
本系統完全基于MATLAB平臺開發,主要集成以下腳本與模塊:
研究結論
本研究基于MATLAB傳統圖像處理技術,提出了一種有效的車輛車型識別與分類方法。通過圖像預處理、背景差分、形態學操作等技術,成功地提取了車輛的特征信息,并結合尺寸、形狀等因素進行了車輛分類。實驗結果表明,該方法能夠高效、準確地識別不同類型的車輛(如中型車、小型車、公交車等)。
實驗環境
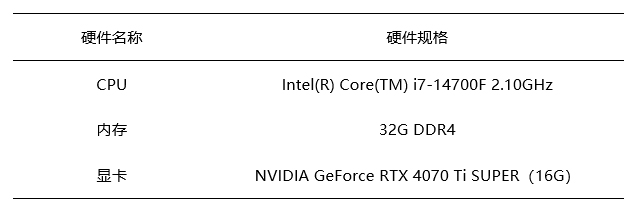
硬件配置如表:實驗所用硬件平臺為惠普(HP)暗影精靈10臺式機整機,運行 Windows 11 64 位操作系統,作為模型訓練與測試的主要計算平臺,能夠良好支持Matlab的開發需求。
官方聲明
實驗環境真實性與合規性聲明:
本研究所使用的硬件與軟件環境均為真實可復現的配置,未采用虛構實驗平臺或虛擬模擬環境。實驗平臺為作者自主購買的惠普(HP)暗影精靈 10 臺式整機,具體硬件參數詳見表。軟件環境涵蓋操作系統、開發工具、深度學習框架、MATLAB工具等,具體配置詳見表,所有軟件組件均來源于官方渠道或開源社區,并按照其許可協議合法安裝與使用。
研究過程中嚴格遵循學術誠信和實驗可復現性要求,確保所有實驗數據、訓練過程與結果均可在相同環境下被重復驗證,符合科研規范與工程實踐標準。
版權聲明:
本算法改進中涉及的文字、圖片、表格、程序代碼及實驗數據,除特別注明外,均由7zcode.張家梁獨立完成。未經7zcode官方書面許可,任何單位或個人不得擅自復制、傳播、修改、轉發或用于商業用途。如需引用本研究內容,請遵循學術規范,注明出處,并不得歪曲或誤用相關結論。
本研究所使用的第三方開源工具、框架及數據資源均已在文中明確標注,并嚴格遵守其相應的開源許可協議。使用過程中無違反知識產權相關法規,且全部用于非商業性學術研究用途。





)
——鏈接預測在社交網絡分析中的應用)



》免費中文翻譯 (第1章) --- Data visualization(2))

)
)





