
案例代碼實現
一、代碼說明
本案例使用PyTorch實現一個改進版LeNet-5模型,用于CIFAR-10數據集的圖像分類任務。代碼包含以下核心步驟:
數據加載與預處理(含數據增強,劃分訓練/驗證/測試集);
定義CNN網絡結構(LeNet-5改進版,適配3通道輸入);
模型訓練(用驗證集評估泛化能力);
模型測試與結果可視化(用獨立測試集最終評估)。
適合人群:數模小白(無需深度學習基礎,代碼注釋詳細,邏輯清晰)。運行環境:Python3.8+、PyTorch1.10+、torchvision0.11+、matplotlib3.5+。
二、完整代碼實現
# 導入必要的庫
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader, random_split
from torchvision import datasets, transforms
import matplotlib.pyplot as plt
import numpy as np# ------------------------------
# 1. 配置全局參數(數模小白可調整這里)
# ------------------------------
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu") # 優先用GPU
BATCH_SIZE = 64 # 每批數據量(越大訓練越快,但占內存越多)
EPOCHS = 10 # 訓練輪數(越大模型越準,但訓練時間越長)
LEARNING_RATE = 0.001 # 學習率(越小收斂越穩,但訓練越慢)
VAL_SPLIT = 0.2 # 驗證集占訓練集的比例(20%)# ------------------------------
# 2. 數據加載與預處理(含數據增強,劃分訓練/驗證/測試集)
# ------------------------------
def load_data():"""加載CIFAR-10數據集,返回訓練/驗證/測試DataLoader"""# 訓練集數據增強(防止過擬合):隨機裁剪、水平翻轉、歸一化train_transform = transforms.Compose([transforms.RandomCrop(32, padding=4), # 隨機裁剪32x32,邊緣補4像素transforms.RandomHorizontalFlip(), # 隨機水平翻轉(50%概率)transforms.ToTensor(), # 轉為Tensor(0-1)transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 歸一化到[-1,1]])# 驗證集/測試集預處理(不增強,保持真實分布)val_test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])# 下載/加載數據集(第一次運行會下載,約170MB)full_train_dataset = datasets.CIFAR10(root="./data", train=True, download=True, transform=train_transform)val_dataset = datasets.CIFAR10(root="./data", train=True, download=True, transform=val_test_transform)test_dataset = datasets.CIFAR10(root="./data", train=False, download=True, transform=val_test_transform)# 劃分訓練集和驗證集(8:2)train_size = int((1 - VAL_SPLIT) * len(full_train_dataset))val_size = len(full_train_dataset) - train_sizetrain_dataset, _ = random_split(full_train_dataset, [train_size, val_size])_, val_dataset = random_split(val_dataset, [train_size, val_size]) # 保持驗證集transform正確# 生成DataLoader(批量加載數據)train_loader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True)val_loader = DataLoader(val_dataset, batch_size=BATCH_SIZE, shuffle=False)test_loader = DataLoader(test_dataset, batch_size=BATCH_SIZE, shuffle=False)return train_loader, val_loader, test_loader# ------------------------------
# 3. 定義CNN網絡結構(改進版LeNet-5)
# ------------------------------
class LeNet5(nn.Module):"""改進版LeNet-5,適配CIFAR-10的3通道輸入(3x32x32)"""def __init__(self):super(LeNet5, self).__init__()# 卷積層1:提取邊緣特征(3通道→6通道,5x5 kernel)self.conv1 = nn.Conv2d(in_channels=3, out_channels=6, kernel_size=5)# 最大池化層1:簡化特征(2x2窗口,步長2)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)# 卷積層2:提取紋理/形狀特征(6通道→16通道,5x5 kernel)self.conv2 = nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5)# 最大池化層2:進一步簡化特征(2x2窗口,步長2)self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)# 全連接層1:整合高級特征(16*5*5→120)self.fc1 = nn.Linear(16 * 5 * 5, 120)# 全連接層2:進一步整合特征(120→84)self.fc2 = nn.Linear(120, 84)# 輸出層:分類決策(84→10類,對應CIFAR-10標簽)self.fc3 = nn.Linear(84, 10)# 激活函數(ReLU,引入非線性,解決線性模型表達能力不足問題)self.relu = nn.ReLU()def forward(self, x):"""前向傳播:定義數據在網絡中的流動路徑"""# 卷積層1 → ReLU → 池化層1:3x32x32 → 6x28x28 → 6x14x14x = self.pool1(self.relu(self.conv1(x)))# 卷積層2 → ReLU → 池化層2:6x14x14 → 16x10x10 → 16x5x5x = self.pool2(self.relu(self.conv2(x)))# 展平:將二維特征圖轉為一維向量(16x5x5 → 400),適配全連接層x = x.view(-1, 16 * 5 * 5)# 全連接層1 → ReLU:400 → 120x = self.relu(self.fc1(x))# 全連接層2 → ReLU:120 → 84x = self.relu(self.fc2(x))# 輸出層:84 → 10(不使用Softmax,因為CrossEntropyLoss會自動處理)x = self.fc3(x)return x# ------------------------------
# 4. 模型訓練與驗證函數(用驗證集評估泛化能力)
# ------------------------------
def train_model(model, train_loader, val_loader, optimizer, criterion):"""訓練模型,每輪輸出訓練/驗證損失與準確率"""best_val_acc = 0.0 # 記錄最佳驗證準確率(用于保存最優模型)for epoch in range(EPOCHS):# ------------------------------# 訓練階段(更新模型參數)# ------------------------------model.train() # 切換到訓練模式(啟用BatchNorm/ Dropout等訓練專用層)train_loss = 0.0train_correct = 0for inputs, labels in train_loader:inputs, labels = inputs.to(DEVICE), labels.to(DEVICE) # 數據移至GPU/CPUoptimizer.zero_grad() # 清空梯度(避免梯度累積)outputs = model(inputs) # 前向傳播:輸入→模型→輸出(預測值)loss = criterion(outputs, labels) # 計算損失(預測值與真實值的差距)loss.backward() # 反向傳播:計算梯度(從損失到各層參數)optimizer.step() # 更新參數(用梯度調整參數,最小化損失)# 統計訓練損失與準確率train_loss += loss.item() * inputs.size(0) # 累計損失(乘以批量大小,避免批量大小影響)_, preds = torch.max(outputs, 1) # 取預測概率最大的類別(0-9)train_correct += (preds == labels).sum().item() # 統計正確預測的樣本數# 計算訓練集平均損失與準確率train_loss = train_loss / len(train_loader.dataset)train_acc = train_correct / len(train_loader.dataset)# ------------------------------# 驗證階段(評估泛化能力,不更新參數)# ------------------------------model.eval() # 切換到驗證模式(關閉BatchNorm/ Dropout等)val_loss = 0.0val_correct = 0with torch.no_grad(): # 關閉梯度計算(節省內存,加速驗證)for inputs, labels in val_loader:inputs, labels = inputs.to(DEVICE), labels.to(DEVICE)outputs = model(inputs)loss = criterion(outputs, labels)# 統計驗證損失與準確率val_loss += loss.item() * inputs.size(0)_, preds = torch.max(outputs, 1)val_correct += (preds == labels).sum().item()# 計算驗證集平均損失與準確率val_loss = val_loss / len(val_loader.dataset)val_acc = val_correct / len(val_loader.dataset)# 打印本輪訓練/驗證結果print(f"Epoch {epoch+1}/{EPOCHS}")print(f"訓練集:損失={train_loss:.4f},準確率={train_acc:.4f}")print(f"驗證集:損失={val_loss:.4f},準確率={val_acc:.4f}")print("-" * 50)# 保存最佳模型(驗證準確率最高的模型,避免過擬合)if val_acc > best_val_acc:best_val_acc = val_acctorch.save(model.state_dict(), "best_model.pth")print(f"訓練結束,最佳驗證準確率={best_val_acc:.4f}(模型已保存至best_model.pth)")# ------------------------------
# 5. 模型測試與結果可視化(用獨立測試集最終評估)
# ------------------------------
def test_model(model, test_loader):"""用獨立測試集評估模型性能,輸出準確率并可視化預測結果"""model.eval() # 切換到驗證模式test_correct = 0with torch.no_grad(): # 關閉梯度計算for inputs, labels in test_loader:inputs, labels = inputs.to(DEVICE), labels.to(DEVICE)outputs = model(inputs)_, preds = torch.max(outputs, 1)test_correct += (preds == labels).sum().item()# 計算測試集準確率test_acc = test_correct / len(test_loader.dataset)print(f"\n測試集最終準確率={test_acc:.4f}")# 可視化10張測試圖像的預測結果(直觀展示模型效果)class_names = ["飛機", "汽車", "鳥", "貓", "鹿", "狗", "青蛙", "馬", "船", "卡車"]inputs, labels = next(iter(test_loader)) # 取一批測試數據(BATCH_SIZE=64)inputs, labels = inputs.to(DEVICE), labels.to(DEVICE)outputs = model(inputs)_, preds = torch.max(outputs, 1)# 繪制圖像(2行5列,顯示10張)plt.figure(figsize=(12, 6))for i in range(10):plt.subplot(2, 5, i+1)# 反歸一化:將[-1,1]轉回[0,1](方便顯示圖像)img = inputs[i].cpu().numpy().transpose((1, 2, 0)) # 轉為HWC格式(高度×寬度×通道)img = img * 0.5 + 0.5 # 反歸一化(原歸一化公式:img = (img - mean) / std → 反推:img = img * std + mean)plt.imshow(img)# 設置標題:真實標簽 vs 預測標簽plt.title(f"真實:{class_names[labels[i]]}\n預測:{class_names[preds[i]]}", fontsize=10)plt.axis("off") # 隱藏坐標軸plt.tight_layout() # 調整子圖間距plt.show()# ------------------------------
# 6. 主程序(整合所有步驟,執行訓練與測試)
# ------------------------------
if __name__ == "__main__":# 1. 加載數據(劃分訓練/驗證/測試集)print("正在加載數據...")train_loader, val_loader, test_loader = load_data()print(f"數據加載完成:\n- 訓練集大小:{len(train_loader.dataset)} \n- 驗證集大小:{len(val_loader.dataset)} \n- 測試集大小:{len(test_loader.dataset)}")# 2. 初始化模型、損失函數、優化器print("\n正在初始化模型...")model = LeNet5().to(DEVICE) # 將模型移至GPU/CPUcriterion = nn.CrossEntropyLoss() # 交叉熵損失(適用于多分類任務)optimizer = optim.Adam(model.parameters(), lr=LEARNING_RATE) # Adam優化器(自適應學習率,收斂更穩定)# 3. 訓練模型(用驗證集評估)print("\n正在訓練模型...")train_model(model, train_loader, val_loader, optimizer, criterion)# 4. 加載最佳模型并測試(用獨立測試集)print("\n正在測試最佳模型...")model.load_state_dict(torch.load("best_model.pth")) # 加載訓練過程中保存的最佳模型test_model(model, test_loader)三、代碼使用說明
1.環境安裝
打開命令行,運行以下命令安裝依賴庫(建議使用虛擬環境):
pip install torch torchvision matplotlib numpy
2.運行代碼
將代碼保存為cnn_cifar10.py,在命令行中運行:
python?cnn_cifar10.py
3.結果解釋
訓練過程:每輪(Epoch)輸出訓練集(更新參數)和驗證集(評估泛化能力)的損失(Loss,越小說明預測越準)和準確率(Accuracy,越大說明模型越準)。
最佳模型:訓練結束后,保存驗證準確率最高的模型到best_model.pth(避免過擬合)。
測試結果:加載最佳模型后,用獨立測試集評估,輸出測試集準確率(一般在70%-85%之間,增加EPOCHS可提高),并顯示10張測試圖像的真實標簽與預測標簽(直觀看到模型效果)。
四、數模小白調整建議
提高準確率:若訓練集準確率低(<80%),可增加EPOCHS(如改為20),讓模型多學習幾輪;或增大LEARNING_RATE(如改為0.002),加快收斂速度。
緩解過擬合:若驗證集準確率遠低于訓練集(如差 10% 以上),可添加更多數據增強(如transforms.RandomRotation(10)隨機旋轉 10 度、transforms.ColorJitter(brightness=0.2)調整亮度),或減小模型復雜度(如將conv1的out_channels=6改為3)。
加速訓練:若訓練太慢,可增大BATCH_SIZE(如改為128,需確保GPU內存足夠),或使用更高效的優化器(如optim.AdamW,帶權重衰減的Adam)。
五、常見問題解答
Q:為什么要劃分驗證集?A:驗證集用于在訓練過程中評估模型的泛化能力,避免模型“記住”訓練集細節(過擬合)。測試集是最終評估模型性能的“考題”,不能在訓練過程中使用。
Q:數據增強為什么有效?A:數據增強(如隨機裁剪、翻轉)通過生成“虛擬”訓練數據,擴大了訓練集的多樣性,讓模型學習到更通用的特征,從而提高泛化能力。
Q:為什么用Adam優化器而不是SGD?A:Adam優化器會為每個參數自適應調整學習率,比傳統SGD(隨機梯度下降)收斂更快、更穩定,適合新手使用。
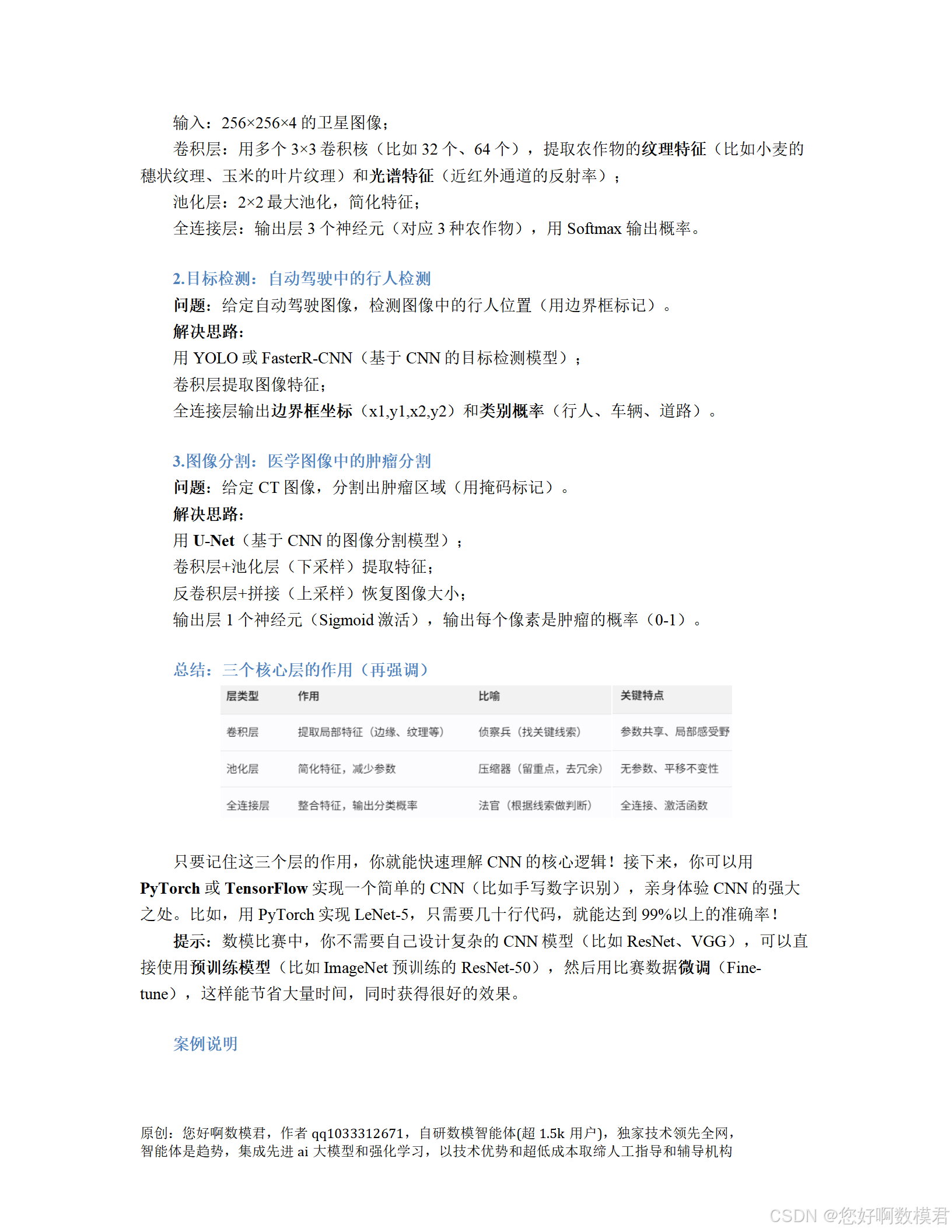
通過運行這份代碼,你可以完整體驗CNN從數據預處理到模型部署的全流程,理解“卷積層提取特征、池化層簡化特征、全連接層做決策”的核心邏輯,為后續更復雜的深度學習模型(如ResNet、YOLO)打下基礎!






)


)
 Part.1)







)
