一.SPI協議介紹
1.硬件連接介紹
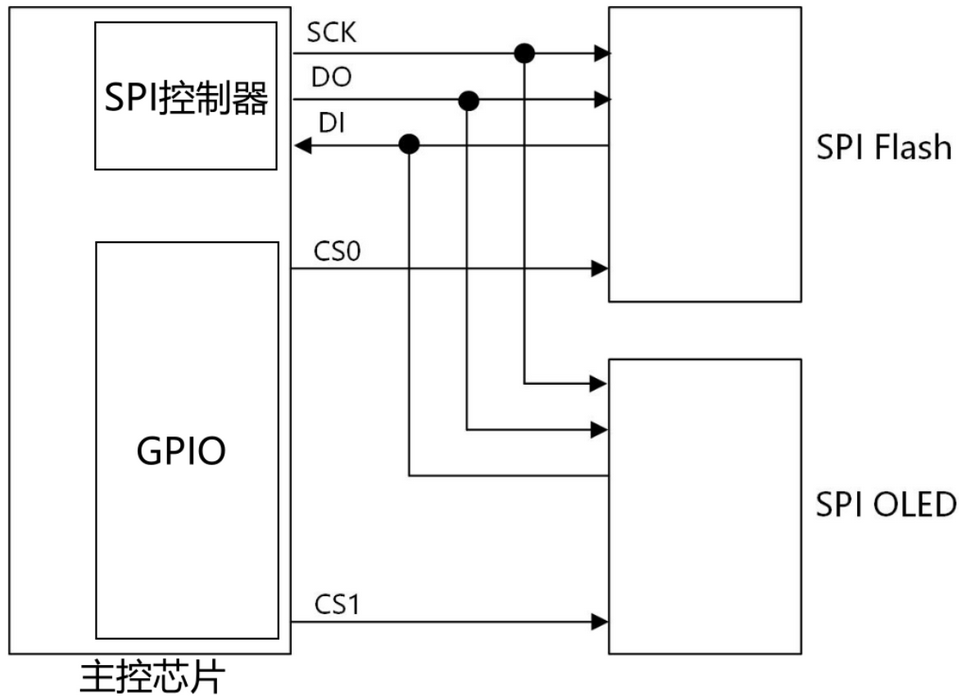
????????引腳含義:
????????DO(MOSI):Master Output, Slave Input,SPI主控用來發出數據,SPI從設備用來接收數據。
????????DI(MISO):Master Input, Slave Output,SPI主控用來發出數據,SPI從設備用來接收數據。
????????SCK:Serial Clock,時鐘。
??????? CS:Chip Select,芯片選擇引腳。
2.SPI協議
a.傳輸示例
????????設現在主控芯片要傳輸一個0x56數據給SPI FLASH,時序如下:
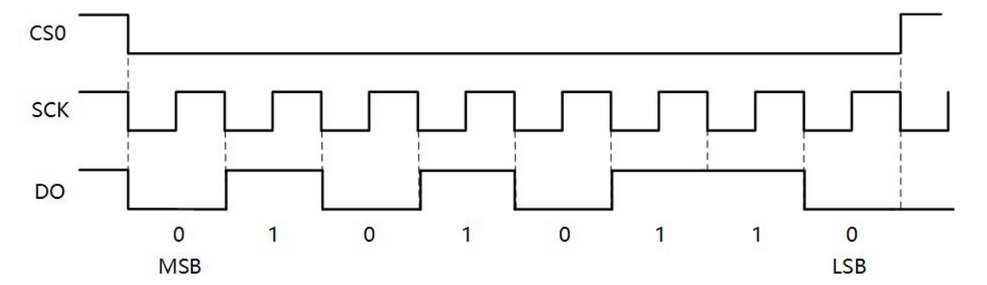
????????首先我們要先拉低 CS0 選中 SPI Flash,0x56的二進制為 0b0101 0110,因此我們在每個 SCK 時鐘周期,DO 輸出對應的電平。SPI Flash 會在每個時鐘周期的上升沿讀取 DO 上的電平。?
b.SPI 模式
????????在 SPI 協議中,有兩個值來確定 SPI 的模式。CPOL:表示 SPICLK 的初始電平,0 為低電平,1 為高電平。CPHA:表示相位,即第一個還是第二個時鐘沿采樣數據,0 為第一個時鐘沿,1 為第二個時鐘沿。
??????? 模式0:CPOL=0,CPHA=0,SPICLK初始電平為低電平,在第一個時鐘沿采樣數據。
??????? 模式1:CPOL=0,CPHA=1,SPICLK初始電平為低電平,在第二個時鐘沿采樣數據
??????? 模式2:CPOL=1,CPHA=0,SPICLK初始電平為高電平,在第一個時鐘沿采樣數據
??????? 模式3:CPOL=1,CPHA=1,SPICLK初始電平為低電平,在第一個時鐘沿采樣數據。
????????常用的是模式0和模式3,因為它們都是在上升沿采集數據,不用在乎時鐘電平的初始電平是什么,只要在上升沿采集數據就行。?
3.特點
a.采用主-從模式(Master-Slave) 的控制方式
????????SPI 規定了兩個 SPI 設備之間通信必須由主設備 (Master) 來控制次設備 (Slave). 一個 Master 設備可以通過提供 Clock 以及對 Slave 設備進行片選 (Slave Select) 來控制多個 Slave 設備, SPI 協議還規定 Slave 設備的 Clock 由 Master 設備通過 SCK 管腳提供給 Slave 設備, Slave 設備本身不能產生或控制 Clock, 沒有 Clock 則 Slave 設備不能正常工作。
c.采用同步方式(Synchronous)傳輸數據
????????Master 設備會根據將要交換的數據來產生相應的時鐘脈沖(Clock Pulse), 時鐘脈沖組成了時鐘信號(Clock Signal) , 時鐘信號通過時鐘極性 (CPOL) 和 時鐘相位 (CPHA) 控制著兩個 SPI 設備間何時數據交換以及何時對接收到的數據進行采樣, 來保證數據在兩個設備之間是同步傳輸的。
d.數據交換(Data Exchanges)
????????SPI 設備間的數據傳輸之所以又被稱為數據交換, 是因為 SPI 協議規定一個 SPI 設備不能在數據通信過程中僅僅只充當一個 “發送者(Transmitter)” 或者 “接收者(Receiver)”. 在每個 Clock 周期內, SPI 設備都會發送并接收一個 bit 大小的數據, 相當于該設備有一個 bit 大小的數據被交換了。
? ????????一個 Slave 設備要想能夠接收到 Master 發過來的控制信號, 必須在此之前能夠被 Master 設備進行訪問 (Access)。所以, Master 設備必須首先通過 SS/CS pin 對 Slave 設備進行片選, 把想要訪問的 Slave 設備選上。
????????? 在數據傳輸的過程中, 每次接收到的數據必須在下一次數據傳輸之前被采樣.。如果之前接收到的數據沒有被讀取, 那么這些已經接收完成的數據將有可能會被丟棄, 導致 SPI 物理模塊最終失效。因此, 在程序中一般都會在 SPI 傳輸完數據后, 去讀取 SPI 設備里的數據, 即使這些數據(Dummy Data)在我們的程序里是無用的。
二.SPI總線設備驅動模型
1.SPI主機驅動
????????SPI 主機驅動就是 SOC 的 SPI 控制器驅動,類似 I2C 驅動里面的適配器驅動。 Linux 內核使用 spi_master 表示 SPI 主機驅動, spi_master 是個結構體,定義在 include/linux/spi/spi.h 文件
中,部分代碼如下:
struct spi_master {struct device dev;struct list_head list;
.....int (*transfer)(struct spi_device *spi,struct spi_message *mesg);
.....int (*transfer_one_message)(struct spi_master *master,struct spi_message *mesg);
}??????? 上述代碼中,transfer 函數,和 i2c_algorithm 中的 master_xfer 函數一樣,控制器數據傳輸函數。transfer_one_message 函數,也用于 SPI 數據發送,用于發送一個 spi_message,SPI 的數據會打包成 spi_message,然后以隊列方式發送出去。
????????SPI 主機端最終會通過 transfer 函數與 SPI 設備進行通信,因此對于 SPI 主機控制器的驅
動編寫者而言 transfer 函數是需要實現的,因為不同的 SOC 其 SPI 控制器不同,寄存器都不一
樣。和 I2C 適配器驅動一樣,SPI 主機驅動一般都是 SOC 廠商去編寫的。
????????SPI 主機驅動的核心就是申請 spi_master,然后初始化 spi_master,最后向 Linux 內核注冊
spi_master。
??????? spi_master的申請與釋放:
????????spi_alloc_master函數用于申請spi_master,函數定義如下所示:
struct spi_master *spi_alloc_master(struct device *dev,unsigned size)??????? dev:設備,一般是 platform_device 中的 dev 成員變量。
??????? size:私有數據大小,可以通過 spi_master_get_devdata 函數獲取到這些私有數據。
?????????spi_master 的釋放通過 spi_master_put 函數來完成,當我們刪除一個 SPI 主機驅動的時候就需要釋放掉前面申請的 spi_master,spi_master_put 函數原型如下:
void spi_master_put(struct spi_master *master)????????master:要釋放的 spi_master。
????????spi_master的注冊與注銷:
????????當 spi_master 初始化完成以后就需要將其注冊到 Linux 內核,spi_master 注冊函數為
spi_register_master,函數原型如下:
int spi_register_master(struct spi_master *master)????????master:要注冊的 spi_master。
????????如果要注銷 spi_master 的話可以使用 spi_unregister_master 函數,此函數原型為:
void spi_unregister_master(struct spi_master *master)????????master:要注銷的 spi_master。
2.SPI設備驅動
????????spi 設備驅動和 i2c 設備驅動也很類似,Linux 內核使用 spi_driver 結構體來表示 spi 設備驅動 , 我 們 在 編 寫 SPI 設 備 驅 動 的 時 候 需 要 實 現 spi_driver 。 spi_driver 結 構 體 定 義 在include/linux/spi/spi.h 文件中,結構體內容如下:
struct spi_driver { int (*probe)(struct spi_device *spi); int (*remove)(struct spi_device *spi); void (*shutdown)(struct spi_device *spi); int (*suspend)(struct spi_device *spi, pm_message_t mesg); int (*resume)(struct spi_device *spi); struct device_driver driver; }; ????????可以看出,spi_driver 和 i2c_driver、platform_driver 基本一樣,當 SPI 設備和驅動匹配成功
以后 probe 函數就會執行。spi_driver 初始化完成以后需要向 Linux 內核注冊,spi_driver 注冊函數為spi_register_driver,函數原型如下:
int spi_register_driver(struct spi_driver *sdrv)????????sdrv:要注冊的 spi_driver。
????????注銷 SPI 設備驅動以后也需要注銷掉前面注冊的 spi_driver,使用 spi_unregister_driver 函
數完成 spi_driver 的注銷,函數原型如下:
void spi_unregister_driver(struct spi_driver *sdrv)????????sdrv:要注銷的 spi_driver。
??????? driver是為device服務的,spi_driver注冊時會掃描SPI bus上的設備,進行驅動和設備的綁定,probe函數用于驅動和設備匹配時被調用。SPI的通信是通過消息隊列機制,而不是像I2C那樣通過與從設備進行對話的方式。
??????? spi_device結構體的內容如下:
struct spi_device { struct device dev; struct spi_master *master; u32 max_speed_hz; u8 chip_select; u8 mode; u8 bits_per_word; int irq; void *controller_state; void *controller_data; char modalias[32]; }; ????????spi_driver 注冊示例程序如下所示:
/* probe 函數 */
static int xxx_probe(struct spi_device *spi){/* 具體函數內容 */return 0;
}
/* remove 函數 */
static int xxx_remove(struct spi_device *spi){/* 具體函數內容 */return 0;
}
/* 傳統匹配方式 ID 列表 */
static const struct spi_device_id xxx_id[] = {{"xxx", 0},{}
};
/* 設備樹匹配列表 */
static const struct of_device_id xxx_of_match[] = {{ .compatible = "xxx" },{ /* Sentinel */ }
};
/* SPI 驅動結構體 */
static struct spi_driver xxx_driver = {.probe = xxx_probe,.remove = xxx_remove,.driver = {.owner = THIS_MODULE,.name = "xxx",.of_match_table = xxx_of_match,},.id_table = xxx_id,
};
/* 驅動入口函數 */
static int __init xxx_init(void){return spi_register_driver(&xxx_driver);
}
/* 驅動出口函數 */
static void __exit xxx_exit(void){spi_unregister_driver(&xxx_driver);
}module_init(xxx_init);
module_exit(xxx_exit);
3.SPI 設備和驅動匹配過程
????????SPI 設備和驅動的匹配過程是由 SPI 總線來完成的,SPI 總線為 spi_bus_type,定義在 drivers/spi/spi.c 文件中,內容如下所示:
struct bus_type spi_bus_type = {.name = "spi",.dev_groups = spi_dev_groups,.match = spi_match_device,.uevent = spi_uevent,
};
????????SPI 設備和驅動的匹配函數為 spi_match_device,其函數內容如下:
static int spi_match_device(struct device *dev, struct device_driver *drv) {const struct spi_device *spi = to_spi_device(dev);const struct spi_driver *sdrv = to_spi_driver(drv);/* 用于完成設備樹設備和驅動匹配 */if (of_driver_match_device(dev, drv))return 1;/* 用于ACPI形式的匹配 */if (acpi_driver_match_device(dev, drv))return 1;/* 用于傳統無設備樹設備和驅動匹配 */if (sdrv->id_table)return !!spi_match_id(sdrv->id_table, spi);/* 比較modalias成員變量和name成員變量是否相等 */return strcmp(spi->modalias, drv->name) == 0;
}
4.SPI 設備數據收發處理
????????當向 Linux 內核注冊成功 spi_driver 后就可以使用 SPI 核心層提供的 API 函數來對設備進行讀寫操作了。首先是 spi_transfer 結構體,此結構體用于描述 SPI 傳輸信息,結構體內容如下:
struct spi_transfer {const void *tx_buf; //保存著要發送的數據void *rx_buf; //用于保存接收到的數據unsigned len; //要進行傳輸的數據長度dma_addr_t tx_dma; dma_addr_t rx_dma; struct sg_table tx_sg;struct sg_table rx_sg;unsigned cs_change:1;unsigned tx_nbits:3;unsigned rx_nbits:3;#define SPI_NBITS_SINGLE 0x01 /* 1bit transfer */#define SPI_NBITS_DUAL 0x02 /* 2bits transfer */#define SPI_NBITS_QUAD 0x04 /* 4bits transfer */u8 bits_per_word;u16 delay_usecs;u32 speed_hz;struct list_head transfer_list;
};
????????spi_transfer 需要組織成 spi_message, spi_message 也是一個結構體,內容如下:
struct spi_message {struct list_head transfers; struct spi_device *spi; unsigned is_dma_mapped:1;....../* completion is reported through a callback */void (*complete)(void *context);void *context;unsigned frame_length;unsigned actual_length;int status; struct list_head queue;void *state;
};
????????在使用spi_message之前需要對其進行初始化:
void spi_message_init(struct spi_message *m)
//m:要初始化的 spi_message
????????spi_message 初始化完成以后需要將 spi_transfer 添加到 spi_message 隊列中:
void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m)
//t:要添加到隊列中的 spi_transfer
//m:spi_transfer 要加入的 spi_message
????????spi_message 準備好后既可以進行數據傳輸,數據傳輸分為同步傳輸和異步傳輸:
/***同步傳輸會阻塞的等待 SPI 數據傳輸完成***/
int spi_sync(struct spi_device *spi, struct spi_message *message)
//spi:要進行數據傳輸的 spi_device
//message:要傳輸的 spi_message
/***異步傳輸不會阻塞等待,需設置spi_message中的
complete回調函數,當異步傳輸完成后此函數就會被調用***/
int spi_async(struct spi_device *spi, struct spi_message *message)
//spi:要進行數據傳輸的 spi_device
//message:要傳輸的 spi_message
????????SPI 數據傳輸示例代碼如下:
/********** SPI 多字節發送 **********/
static int spi_send(struct spi_device *spi, u8 *buf, int len){int ret;struct spi_message m;struct spi_transfer t = { //1. 定義一個spi_transfer結構體變量,并設置成員變量.tx_buf = buf,.len = len,};spi_message_init(&m); //2. 初始化 spi_messagespi_message_add_tail(t, &m); //3. 將 spi_transfer 添加到 spi_message 隊列ret = spi_sync(spi, &m); //4. 同步傳輸return ret;
}
/********** SPI 多字節接收 **********/
static int spi_receive(struct spi_device *spi, u8 *buf, int len){int ret;struct spi_message m;struct spi_transfer t = { //1. 定義一個spi_transfer結構體變量,并設置成員變量.rx_buf = buf,.len = len,};spi_message_init(&m); //2. 初始化 spi_messagespi_message_add_tail(t, &m); //3. 將 spi_transfer 添加到 spi_message 隊列ret = spi_sync(spi, &m); //4. 同步傳輸return ret;
}




))







)





(筆記)(面試考試必備知識點))
