第 5 章? 線性算子之應用
(Applications of Linear Operators)
By relieving the brain from all unnecessary work,
a good notation sets it free to concentrate
on more advanced problems.( 通過減輕大腦所有不必要的工作,良好的符號可以讓大腦集中精力解決更高級的問題)
------------------------------------------------ Alfred North Whitehead
目錄
5.1? 正交矩陣和旋轉(Orthogonal matrices and rotations)
5.2? 使用連續性(Using continuity)
5.3? 微分方程組(Systems of differential equations)
5.4? 矩陣指數(The matrix exponential)(矩陣作為指數)
5.1? 正交矩陣和旋轉(Orthogonal matrices and rotations)
???????? 在本節中,標量域是實數域。
我們假設讀者已熟悉??中向量的點積(譯注:又稱點乘,標量積,內積),
??中的列向量?
? 和?
??的點積定義為
(5.1.1) ??????? ? 。
出于方便,我們將點積記為一個行向量和一個列向量的矩陣積
(5.1.2)? ? ? ??? ?。
對于? ???中的向量,我們有公式
(5.1.3)? ? ? ?? ,
其中,θ 是這兩個向量之間的夾解。此公式可通過余弦定律導出,即一個三角形的三邊 a,b , c 和邊? a 和 b 的夾解 θ ?之間存在關系
(5.1.4)??? ??? ?。
為了推導出 (5.1.3) ,我們將余弦定委應用于頂點分別為 0,X,Y 的三角形。其邊長分別為 | X |,| Y |,| X - Y | ,? 因此,其余弦定律可以寫成
(5.1.5) ? ? ?? ?。
上式左邊展開為? ( X. X ) -2(X. Y) + ( Y. Y ) ,并將其與右邊進行比較,從而得到公式(5.1.3)。此公式對???中的向量同樣成立,但要求理解其角度的含義。但我們現在不討論這個問題(參見(8.5.2))。
對??? 和? ?
??中的向量而言最重要的意義在于:
?? 一個向量 X 的長度之平方???是 ?
??。和
? ?對于兩個向量 X 和 Y ,當且僅當???時,此二向量是正交的(orthogonal),記為 X ? Y?。
(譯注:向量的正交意味著二向量的方向之間沒有相似性,因此一個向量在另一個向量上的投影為零,即點積為0 。)
我們將上述兩條分別視為????中向量之間正交性和單向量長度(點積開根號)的定義。注意,向量的長度 | X | 是正值(除非其為0向量),因為?
??是平方之和(譯注:此解釋欠妥,度量長度當然是正值,不能用長度的平方去解釋其長度是正值,因為長度是內積開方之后的值,而內積是長度的平方 )。
定理 5.1.5 (Pythagoras定理)? 若 X ? Y ?且 Z = X + Y ?,則?? 。
將????展開即可證明。若 X ? Y ?,則?
???,因此
? 。
我們切換到小寫的向量記法。若??? ?是??
??中的正交向量,若??
? ?,則根據Pythagoras 定理用歸納法可證明
(5.1.6)? ? ? ?? 。
引理 5.1.7? ?????中的正交非零向量的任意集合 ?
??都是獨立的(譯注:即線性無關的 )。證明:
令??? ?為一個線性組合,其中,并非所有?
?都為零,并令?
??。則 w 是正交向量(并非所有項都為0)之和? ?
??。根據 Pythagoras 定理 ,有??
??, 因此 w ≠ 0 。
?? ????的一個正交基 ?
??是正交單位向量(長度為1)的一個基。可用另一種方式表述此思想:若
(5.1.8)? ? ? ????
(其中,???是Kronecker δ ,是恒等矩陣的第 i, j 項,當 i = j 時其值為1,而當 i ≠ j 時其為0),則 B 是正交單位向量的一個基。
定義 5.1.9? 對于一個實 n × n 矩陣A , 若???,則其是正交的,即矩陣 A 可逆且其逆是?。
引理 5.1.10? 對于一個實 n × n 矩陣 ,當且僅當其列構成??的一個正交基時,此矩陣是正交的。
證明:
令???表示 A 的第 i 列。則?
??是??
??的第 i 行。?
??的第 i, j 項是?
??,因此,當且僅當對于所有 i 和 j ,? 都有?
??時,
? 。
不難驗證正交矩陣具有下列屬性:
命題 5.1.11?
(a)? 正交矩陣之積是正交的,一個正交矩陣之逆(其轉置,即行變為列)是正交的。正交矩陣構成了 ???的一個子群?
??(譯注:取orthogonality這個單詞的首字母命名),稱為正交群。
(b)?? 一個正交矩陣的行列式是 ±1 。行列式為 1 的正交矩陣構成了一個二階正交群? ???的一個子群 ?
??,稱為特殊正交群(special orthogonal group)。
定義 5.1.12? ????上的一個正交算子 T 是一個保留了點積的線性算子:對于每一個向量對 X ,Y ,有
????????????? ( TX ? TY ) = (X ? Y ) 。
命題 5.1.13? 對于????上的一個線性算子T ,當且僅當其保留向量長度或對于每一個向量X ,有 ( TX ? TX ) = (X ? X ) 時,其是正交算子。
證明:
??? 假設線性算子保留長度,令 X 和 Y 為???中的任意向量。則
( T(X+Y ) ? T(X+Y ) ) = ((X+Y ) ?(X+Y ) ) 。
根據 ( TX ? TY ) = (X ? Y ),通過將上述等式兩邊展開并抵消相關項而證明命題。
命題 5.1.14?? 對于???上的一個線性算子T ,當且僅且其關于標準基的矩陣 A 是一個正交矩陣時,此算子是正交的。
證明:
???????? 若 A 是 T 的一個矩陣,則
? ?。
當且僅當對于所有?X 和 Y? ,上式右邊等于????時,這個算子是正交的。我們可以將這個條件寫成??
??。下一個引理表明,當且僅當??
??時,這個條件是成立的,從而 A 是正交的。
引理 5.1.15? 令 M 為 n × n? 矩陣。若對于所有的列向量 X 和 Y ,都有???,??則 M = 0 (譯注,即零矩陣 [0] )。??
證明:
??? 對 M 的 i, j 項計算乘積???。例如
? ? 。
(譯注:上述例子有誤,列向量? ?? ?的轉置是 [1,0] ,因此上式應該是
? ? 。
)
若對于所有 i, j 有??? ,則 M = 0 。
現在我們描述 2 × 2 正交矩陣。
?? 對于????上的一個線性算子T ,若其分別具有以 1 和 -1 為特征值的特征向量?
??和??
??,則稱其為反射算子(reflection)。
因為其固定?????并改變正交向量??
??的符號,這樣的一個算子關于由?
??張成的一維子空間的平面反射。關于??
??軸反射的算子矩陣為
(5.1.16)?????? ??? ?。
定理 5.1.17?
(a) 具有行列式1 的 2 × 2 正交矩陣是矩陣
(5.1.18)?? ? ?? ?,
其中,c = cos(θ) 和 s = sin(θ) (對于某個角度 θ )。矩陣 R 表示平面???關于原點并繞過角度 θ 的逆時鐘旋轉。
(b)? 具有行列式 -1 的 2 × 2 正交矩陣是矩陣
(5.1.19)?? ? ?? ,
其中,c 和 s 如上 。矩陣 S 關于????的與?
???軸呈角度 ?
??的一維子空間反射平面。
證明:
??? 不妨設
????????????????????????
為一個正交矩陣。則其列是單位向量 (5.1.10),因此,點? ???位于單位圓內,且 c = cos(θ) 和 s = sin(θ) (對于某個角度 θ )。我們檢查積?
??,其中,R?是矩陣 (5.1.18):
(5.1.20)??????? ?。
由于???和 A? 是正交的,因此 P 也是正交的。引理 5.1.10 告知我們,第二列是一個與第一列正交的單位向量。因此
(5.1.21)??????? 。
回到問題,A? = RP ?,因此,若? det(A) = 1 ,則 A? = R ,而若? det(A) = -1 ,則?? 。
我們已經看到,R表示旋轉 (4.2.2) ,但我們仍然必須驗證由矩陣 S 定義的算子。S的特征多項式是? ????????? ?,因此,其特征值是 1 和 -1 。令?
??和??
??為具有這些特征值單位長度的特征向量。因為 S 是正交的,
? 。
從而可推導出????。由于特征向量是正交的,因此?
??的張成(span)將是反射線。為了確定這條線,我們將一個單位向量 X 寫成??
? (?
? ,?
)。則
? 。
當????時,X 是一個特征值為 1 ?的特征向量,為一個固定的向量。
下面我們描述 ?3 × 3 旋轉矩陣。
定義 5.1.22 ??????關于原點的一個旋轉是一個線性算子 ρ ,其具有以下屬質:
?? ρ 固定一個單位向量 u ,稱為 ρ 的一個極點,以及
?? ρ? 將二維子空間 W 旋轉至與u?正交。
旋轉軸是由 u 張成的直線 𝓁 。同樣,我們稱恒等算子為一個旋轉,盡管其軸是不確定的(indeterminate)。
若一個 3 × 3 矩陣?R?是?? ?的一個旋轉,則稱 R 為一個旋轉矩陣。
(5.1.23)
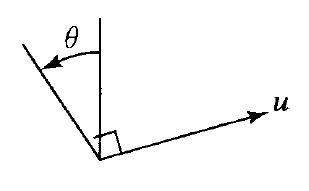
------------------------------------------------???的一個旋轉-------------------------------------------------
旋轉角的符號取決于子空間 W 如何定向。我們根據箭頭 u 的頭來定向 W 。圖中展示的角度 θ 是正的。(這稱為“右手法則”。)
當 u 是向量????時,集合?
??將是 W 的一個基,則 ρ 的矩陣形式為
(5.1.24)
? ? ,
其中,右下 ?2 × 2 ?子式是旋轉矩陣(5.1.18)。
?? 非恒等旋轉用 (u , θ) 對描述,稱為一個自旋(spin),其由一個極點 u 和一個非零旋轉角 θ 組成 。
??? 具有自旋 (u , θ) 的旋轉可以記為? ?? 。每一個不同于恒等旋轉的旋轉 ρ? 都有兩個極點,即旋轉軸 𝓁? 與?
?中單位球的交集。這些是 ρ 的具有特征值 1 的單位長特征向量。一個極點 u 的選擇就定義了 𝓁 上的一個方向 , 且變更方向會引起符號按旋轉角變化 。若 (u , θ) 是 ρ 的一個自旋,則 ( -u , -θ ) 也是ρ 的一個自旋。因此,每一個旋轉都有兩個自旋,且 ??
?。
定理 5.1.25 (Euler 定理) ?一個 3 × 3 旋轉矩陣是行列式為 1 的 3 × 3 正交矩陣,其是特殊正交群???之元素。
Euler 定理有一個顯著的推論,基推導基于????是一個正交群的事實。但不管是在代數上還是幾何上,這都不明顯。
推論 5.1.26? 關于任意兩個軸的旋轉的合成是關于某個其他軸的旋轉。
??? 因為其元素表示旋轉,因此群??? 和??
??分別稱為二維和三維旋轉群。當維數大于 3 時,情況就變得更加復雜。
4 × 4 矩陣
(5.1.27)? ? ? ???
是????的一個元素,通過左乘此矩陣就將由?
? 張成的二維子空間旋轉角度?α,并將由 ? ?
??張成的二維子空間旋轉角度?β?。
在證明 Euler 定理之前,我們另注意兩個結論:
推論 5.1.28? 令 M 為????中表示具有自旋 (u , α) 的旋轉?
??之矩陣。則
(a)? M??的跡是?? 。
(b) 令 B 為? ??的另一個元素,并令?
??。則共軛?
??表示具有自旋?
??的旋轉 ?
? 。
證明:
(a)? 我們選擇????的一個正交基,使得?
??。則 ρ 關于這個基的新的矩陣具有 (5.1.24) 的形式,即跡將為?
? 。由于跡與基的選擇無關,因此 M 的跡也是?
?。
(b)??由于???是一個群,?
?是??
??的一個元素。則根據 Euler 定理,?
??是一個旋轉矩陣。此外,?
??是這個旋轉的一個極點:由于 B 是正交的,因此,?
??長度為1(譯注:正交矩陣的行向量和列向量均為單位向量,行向量或列向量長度均為1) ,且
? ?。
令????為??
??關于極點??
??的旋轉角。則 M 的跡與其共軛?
??是相等的。因此?
??。這意味著?
???。 根據 Euler 定理,矩陣 B 也表示一個旋轉,比如,關于某個極點旋轉角度 β 。由于 B 和??
??連續地依賴 β ,只會出現? ?
??的兩個值?
? 之一的情況。當 β = 0 時,B? = I ,?
??, 且?
??。從而對于所有 β ,都有?
??。
引理 5.1.29? 一個行列式為 1 的 3 × 3 正交矩陣 M 有一個等于 1 的特征值。
證明:
??? 為了證明 1 是該矩陣的一個特征值,我們證明行列式 M – I 的行列式為零。若 B 是一個 n × n 矩陣 ,則???。我處理的是 3 × 3 矩陣,因此??
??。此外,?
???且
?。
則
? 。
??的這種關系表明?
? 。
Euler定理之證明:
假設 M 表示具有自旋? (u , α?) 的旋轉 ρ 。我們通過向 u 追加一個其正交空間W 的一個正交基的方式構成一個正交基B 。ρ 關于這個基的矩陣????將具有 (5.1.24) 的形式,其行列式為1 且是正交的。此外,有?
???,其中,矩陣 P?? 等于 [B] (3.5.13) 。由于其列是正交的,因此 ?[B] ?是正交的。從而 M 也是正交的,且其行列式等于 1? 。
反之,設M?是一個行列式為1的正交矩陣,T?表示與M?的左乘。設u?是一個特征值為1 的單位長度特征向量,W?是與?u?正交的二維空間。由于T?是一個固定u?的正交算子,它將W 映射到自身。因此W是一個T?不變子空間,我們可以將算子限制在W上。
??? 由于 T 是正交的,它保持長度不變(5.1.13),因此它對 W 的限制也是正交的。現在 W 的維度是 2,我們知道 2 維上的正交算子:它們是旋轉和反射(5.1.17)。反射是行列式為 -1 的算子。如果算子 T 作為反射作用于 W,并固定正交向量 u,則其行列式也將為 -1。由于情況并非如此,因此???是旋轉。這驗證了定義 5.1.22 的第二個條件,并表明 T 是旋轉。
5.2? 使用連續性(Using continuity)
??? 關于復矩陣的各種事實可以利用我們在此解釋的基于連續性的推理通過對角化推導出來。
對于一個 n × n 矩陣序列???和一個 n × n 矩陣 A , 若對于每一個 i 和 j ?,
??的第 i ,j? 項都收斂于 矩陣 A 的i ,j? 項,則稱矩陣序列??
??收斂于矩陣 A 。 類似地,對于一個復系數 n 階多項式序列?
???(k = 1 ,2 ,…)和一個 n 階多項式 p(t?) ,若對于每一個 j ,
??中的系數?
??都收斂于 p 的相應系數,則稱多項式序列?
??收斂于 p 。我們可以通過記法表明一個復序列,復矩陣,復多項式??
??收斂于某個 S ,?即記為?
? 。
命題 5.2.1 (根的連續性)? 令????為一個階數 ≤ n ?的首一(monic,首項系數為1)多項式序列,并令 p?(?t?) 為另一個n階首一多項式。令??
??和??
??分別表示這兩個多項式的根。則
(a)? 若對于 ν = 1 ,… ,n ,有? ????,則 ?
? 。
(b)? 反之,若??????,
??的根??
??可以按這樣一種方式編號,即對于 ν = 1 ,… ,n ,有?
??。
在 (b) 部分,每一個多項式?????的根必需單獨編號。
證明:
???????? ?我們注意到,??和??
???。而推導 (b) 所基于的事實是,p(t) 的系數是根的連續函數(多項式函數),但 (b) 作為多項式的函數不明顯。
第1步:
令????為??
??的最接近??
??的根,即其使得?
???最小 。我們重寫編號?
??的根,使得這個根為??
???。則
? 。
右邊收斂于????。因此,右邊必須也收斂于此。這就證明了?
???。
第2步:
我們將多項式分解,記????和?
??。則??
??和 q 是首一多項式,它們的根分別是?
??和??
??。若我們能證明?
??,則基于 n? 執行歸納,我們將能夠排列?
??的根,使其收斂于 q 的根,我們按這種方法進行。
為了證明???,我們進行顯式分解。為了簡化記法,我們略去從 1 到?
??的下標。比如,?
? ,??
???,而?
? 和??
??是類似的 。方程??p(t) = (1 - α)q(t)? 意味著:
?
由于? ??? ?且??
???,因此??
? ?成立。
命題 5.2.2? 令 A 為一個 n × n 復矩陣。則
(a) 存在一個收斂于 A 的矩陣序列 ???,使得對于所有的?k ,?
??的特征多項式?
??具有不同的根。
(b) 若一個矩陣序列????收斂于 A ,則其特征多項式?
??收斂于A 的特征多項式 p(t) 。
(c) ?令 ???為特征多項式的 p(t) 根。則若??
??,?
??的根??
??可以標號以使得對于每一個 i , 有??
? 。
證明:
??? 根據命題 4.6.1 ,存在一個可逆矩陣 P ,使得??呈上三角陣,其特征值是此上三角陣的對角線項。令?
??為一個收斂于 A? ?的矩陣序列,其非對角線項(off-diagonal) 與??
??的非對角線項相同,而其對角線項不同。則??
??是上三角陣,且其特征多項式具有不同的根。令??
????。由于矩陣乘是連續的,因此 ??
?從而?
??的特征多項式與?
? ?的相同,因此其同樣具有不同的根。
(b) 部分由 (a) 推出,因為特征多項式的系數連續依賴于矩陣項,因此 (c) 由命題 5.2.1 得出。
??? 我們可以使用連續性來證明著名的 Cayley-Hamilton 定理。我們按其矩陣形式來表述這個定量。
定理 5.2.3(Cayley-Hamilton 定理)? 令???為 n × n 復矩陣 A 的特征多項式。則??
??是零矩陣。
例如,2 × 2 矩陣 A 的特征多項式是????(其中,a, b, c, d ?如常 )(4.5.12)。根據定理,可斷言
(5.2.4)??? ??? ?。
這不難驗證。
Cayley-Hamilton 定理之證明:
第1步:A 是對角矩陣的情況。
令對角項為????。則其特征多項式是
? 。
此處的 p(A) 也是一個對角矩陣,其對角項是???, 由于??
??是 p 的根,則??
???且 p(A) = 0 。
第2步:A 的特征值不同的情況。
??? 在這種情況下,A 是可對角化的矩陣;比如,??是對角陣。則?
??的特征多項式與 A 的特征多項式 p?(?t?)? 相同,此外
????(見 (4.6.14) ) 。
根據第 1 步,???,從而 p(A) = 0 。
第3步:一般情況。?
??? 我們應用命題 5.2.2 。我們令????為具有不同特征值的收斂于 A 的矩陣序列。令?
??為?
??的特征多項式。由于?
??收斂于 A 的特征多項式 p ,即??
? 。
根據第二步,對于所有的 k?有?????。從而 p(A) = 0 。
5.3? 微分方程組(Systems of differential equations)
???????? 我們知道,在微積分中,微分方程
(5.3.1) ? ? ???
的解是?????,其中,c 是一個任意實數。我們回顧一下其證明,因為我們想再次使用這個論證。首先,??
???確實是這個方程的解。為了證明方程的每一個解都具有這種形式,我們令? x(t) 為一個任意解。我們利用乘積法則微分??
? :
(5.3.2) ??????? 。
因此,???是一個常量 c ,且?
? 。
為了將此解擴展到常系數微分方程組,我們使用以下術語。一個向量函數(vector-valued function)或矩陣函數(matrix-valued function)是一個向量或矩陣,其項(或元素)是?t 的函數:
(5.3.3)??????????????????? ?,? ??
? ?。
通過對每一個元素分別進行運算,取極限和微分的微積分運算擴展到向量函數和矩陣函數。向量函數或矩陣函數的導數是通過對每一個元素進行微分得到的函數:
(5.3.4) ? ? ??? ,? ??
? ,
其中,??是??
??的導數,如此,等等。因此,如果每一個函數??
??可微,則微分?
??有定義。導數也可以按矩陣符號表示:
(5.3.5)??? ?? 。
這里 X(t + h) - X(t?) 由向量加法計算,分母中的 h 表示與???的標量乘。極限是通過分別求每一個元素的極限得到的。因此,(5.3.5) 的元素是導數??
??。類似的命題也適用于矩陣函數。
微分的許多基本性質可以推廣到矩陣函數。例如,乘積法則的證明可以作為練習:
引理 5.3.6 ?乘積法則(Product Rule)。
(a)? 令 A(t) 和 B(t) 為 t 的可微矩陣函數,且具有使得其積有定義的合適的大小。則矩陣乘積 A(t?)B(t?) 是可微的,其導數是
? 。
(b)? ??令??? ?為?t??的可微矩陣函數序列,且具有使得其積有定義的合適的大小。則矩陣乘積?
??是可微的,其導數是
? 。
一個齊性線性一階常系數方程組是一個矩陣方程,其形式為
(5.3.7)??? ?? ?,
其中,A 是一個常量 n × n 矩陣,X 是一個 n 維向量函數。寫出這樣一個方程組,我們就得到了一個 n 維微分方程組
(5.3.8)?
............................................................
? 。
??是未知函數,標量?
??已知。例如,若
(5.3.9)? ? ?? ,
則 (5.3.7) 就成了一個具有2個未知數的由兩個方程構成的方程組
(5.3.10)??
? ?。
最簡的方程組是那些矩陣 A 是具有對角元素????的對角陣的方程組。則方程組 (5.3.8) 解讀為
(5.3.11)??????? 。
在此,未知函數???不會被方程混淆,因此我們可以分別對每一個方程求解:
(5.3.12)?? ????( 對于某個任意的常量?
? )
在很多情況下,我們可以利用以下觀察結果來求解微分方程 (5.3.7):若 V 是 A 的一個特征為 λ 的特征向量 ,即 AV = λV? ?,則
(5.3.13)?????? ??
是 (5.3.7)的一個特解。此處????? 必須解釋為標量變量??
??與常向量 V? 之積。固定 V ,微分作用于標量函數,而固定標量?
??,乘以 A 則作用于向量V 。因此??
? ?,?另外??
??? 。例如,
? ?和??
??
是矩陣 (5.3.9) 的特征向量,其特征值分別是 5 和 2 ,且
(5.3.14)?? ? ??? ?和??
??
是方程組 (5.3.10)的解 。
由此觀察,只要矩陣 A 具有不同的實特征值,我們就能求解 (5.3.7)。在這種情況下,每一個解都將是 (5.3.13) 特殊解的線性組合。為了解決這個問題,對角化是一種便捷的方法。
命題 5.3.15? 令 A 為一個 n × n 矩陣,并令 P 為一個可逆矩陣,并使得 ???是對角陣,且對角元素為??
? ?。這個方程組?
??的通解是??
???,其中 ?
? ?是方程??
??的解。系數?
??是任意的。它們通常由賦預的初始條件( X 在某個特解?
??處的值)確定。
證明:
我們用 P ?乘以方程? ?? :?
? 。但由于 P ?是常量,因此??
??。從而??
??。這個推理可以反過來,因此,當且僅當 X 用 A 解方程時,
??用 Λ 解方程。對角化矩陣 (5.3.10) 的矩陣是在 (4.6.8) 之前計算的:
(5.3.16) ? ? ?? ?,??
??, 以及??
? 。
因此,
(5.3.17)?? ?? ?。
換言之,方程的每一個解都是兩個基本解的線性組合。
??? 我們現在考慮系數矩陣 A 具有不同特征值的情況,但它們并不完全是實數。為了復制上面使用的方法,我們首先考慮形如 (5.3.1) 的微分方程,其中a 是一個復數。恰當的解釋是,這樣一個微分方程的仍然具有形如 ??的解。唯一需要記住的是,??
???現在將成為實變量t的復函數。
復函數導數的定義與實函數的定義相同,只要極限 (5.3.5)存在。沒有新的特征。我們可以把任何這樣的函數 x(?t?) 寫成它的實部和虛部的形式,這樣,它們就成為實函數了,比如,
(5.3.18)?? ??? 。
則當且僅當 p?和 q 可微時,x 可微,且它們可微,則 x 的導數是???
。 這可直接根據定義推導。微分的常規法則(例如乘積規則)對復函數仍然成立。這些規則可以通過對p和 q 應用相應的實函數定理,或者復制相應的實函數的定理來證明。
??? 一個復數 r + si? ?的指數定義為
(5.3.19)?? ?? ?。
這個公式的微分表明????。因此,?
??是微分方程 (5.3.1) 的解,本節開頭給出的證明表明這個些是唯一的解。
將單個方程的情況擴展到復系數的情況后,當 A 是一個具有不同特征值的復矩陣時,我們可以利用對角化來求解方程組 (5.3.7)。
????????例如,令?? ?。向量??
? 和?
? ?是其特征向量,其特征值分別為 1 + i 和 1 - i 。令 B 表示基?
??。則 A 通過矩陣 P = [B] 對角化:
(5.3.20)?? ?
? 。
則??? 。方程 (5.3.7) 的解是
(5.3.21)??????
? ,
其中,? ,??
??是任意復數。因此,每一個解都是這兩個基本解
(5.3.22)? ? ?? ?和? ? ?
? ?
的一個線性組合。然而,這些解并不令人滿意,因為我們一開始就得到了一個實系數微分方程組,而得到的答案是復數。當方程為實數時,我們需要的是實數解。我們注意到以下引理:
引理 5.3.23? 令 A 為一個實 n?×?n ?矩陣,且令 X(?t?) 為微分方程????的一個復解。的實部和虛部為同一方程的解。
現在,原方程 (5.3.7) 的每一個解,無論是實解還是復解,對于某些復數???,都具有形式 (5.3.21)。因此,實解包含于我們已求得的解之中。為了明確地寫出它們,我們可以取復解的實部和虛部。
基本解 (5.3.22) 實部和虛部使用 (5.3.19)確定。它們是
(5.3.24)? ? ? ? ??? 和??
? ? 。
每一個實解都是這些特解的一個實數線性組合。
5.4? 矩陣指數(The matrix exponential)(矩陣作為指數)
??? 一階線性常系數微分方程組可以用矩陣指數來正式求解。
??? 一個實或復 n?×?n ?矩陣A的指數也是一個一個矩陣,可通過在???的Taylor級數中用 A代替x 并用 ?I?替換1 而求得。Taylor級數為
(5.4.1)??? ??? 。
因此,根據定義
(5.4.2) ??? ?。
我們主要的興趣點在于標量變量 t 的矩陣函數???,因此我們在上式中將 A 替換為?tA:
(5.4.3) ??? ?? ?。
定理 5.4.4
(a)? 該級數 (5.4.2) 在復矩陣的有界集上絕對且一致收斂。
(b) ????是 t 的一個可微函數,其導數是矩陣乘法 ??
?。
(c) 設 A 和 B 為可交換的復?n × n 矩陣: AB = BA 。則 ?? 。
為了不打斷討論,我們將該定理的證明移到了本節的末尾。
???????? A 和 B 為可交換的假設對于將基本性質???推廣到矩陣至關重要。因此,(c) 非常重要。
推論 5.4.5? 對于任意 n × n 復矩陣,指數 ?? ?是可逆的,且其逆是 ?
? 。
證明:
??? 因為 A 和 -A 可交換,因此??。
由于矩陣乘法相對復雜,通常不容易寫下矩陣???的元素。除非 A 是對角矩陣,否則無法通過對 A 的元素指數化來獲得它們。若 A 是對角陣,且對角線上的元素為??
??,則通過級數檢查表明?
??也是呈對角化的 ,且其對角線元素為??
? 。
對于一個三角 2 ?× 2 矩陣,這個指數也相當容易計算。例如,若
? ,
則
(5.4.6)??? ??? 。
直接從級數計算缺失項 * 是一個非常好的習題。?
只要我們知道某一個矩陣P ?,其使得???呈對角化,則我們就可以確定???
??的指數。使用法則?
??(4.6.12) 以及矩陣乘法的分配律 ,得到
(5.4.7) ? ? ? ? ??? 。
假設 Λ? 呈對角化,且其對角化元素為???。 則?
?也呈對角化,且其對角化元素為?
??。在這種情況下,我們可以顯式地計算??
??:
(5.4.8)??? ? ? ?? 。
例如,若? ??? ?而?
??,則??
? ?。因此
? 。
下一個定理將矩陣指數與微分方程聯系起來:
定理 5.4.9? 令 A? 為一個實或復 n × n 矩陣。則矩陣???的列構成微分方程 ???
??的解空間的一個基。
證明:
根據定理 (5.4.4)(b),???的列是微分方程的解。為了證明微分方程的每一個解都是列的一個線性組合,我們復制 5.3 節開頭已經的這個證明。令 X(t?) 為一個任意解。我們用乘法法則 (5.3.6) 微分?
??:
(5.4.10)?????? ?? 。
慶幸的是,A 和???可交換。這一特性可直接根據指數的定義推導。因此函數的導數是零。從而??
? ??是一個常量列向量,不妨設其為??
??,則??
??。這樣就將? X?(t?)? 表示成了? ?
? ?的列向量的線性組合,且系數為??
??。且這種表示是唯一的,因為??
???是一個可逆矩陣。
雖然矩陣指數總是能解微分方程 (5.3.7),但它可能不容易應用于具體情況,因為指數的計算可能很困難。但如果 A 可對角化,則可以像 (5.4.8) 中那樣計算指數。我們可以用這種求????的方法來解方程 (5.3.7)。當然,我們會得到和之前相同的解。因此,如果 A、P 和 A 與 (5.3.16) 中一樣,則
? ?。
右側矩陣的列構成了解空間的第二個基,該基是在 (5.3.17) 中求得的。
??? 我們也可以使用 Jordan 形來解微分方程。任意 k × k? Jordan 塊????(4.7.5) 都可以通過計算矩陣指數來確定。我們記??
??,和 (4.7.12) 中一樣,其中 N 是 k × k? Jordan 塊? ?
??且?
??,因此
??? 。
由于 N 和 λI 可交換,
????? 。
因此,若 J 是 3 ×3 ??Jordan 塊,即
?? ,
則
? ? 。
這個矩陣的列構成了微分方程????的解空間的一個基。
現在我們回過頭來證明定理 5.4.4 。我們將用到的關于級數極限的主要事實如下,并參考了[Mattuck]和[Rudin]的文獻。這些作者只考慮了實函數,但其證明也適用于復函數,因為復函數的極限和導數可以通過分別處理實部和虛部來定義。
??? 若 r 和 s 是實數且 r < s? 。記法 [?r, s?] 表示區間 r ≤ t ≤ s 。
定理 5.4.11 ([Mattuck], 定理 22.2B, ?[Rudin], 定理7.9) ???令???為一個正實數序列,且使得?
??收斂。若 ?
??是閉區間 [?r, s?] 上的一個函數,且若對于此區間中的所有?t?和所有 k ,有?
??。則級數? ?
??在此區間上于致收斂。
定理 5.4.12 ?([Mattuck], 定理 11.5B, ?[Rudin], 定理7.17)??? 令????為一個在區間 [r, s] 上具有連續導數物函數序列。假設級數?
??收斂于一個函數 f (t?) ,且其導數組數???
??在這個區間上一致收斂于一個函數 g?(t?) 。則函數? f? 在此區間上可微且其導數為? g 。
定理 5.4.4 之證明。
(a): 在此,我們用???一個矩陣 A 的第 i,?j 個元素。因此,?
??表示乘積矩陣 AB? 的元素。而?
? ?表示第 k? 個冪?
??的元素。按照這種記法,?
??的第 i,?j 個元素是級數和?
(5.4.13)? ? ? ??? ? ? 。
為了證明指數級數絕對且一致地收斂,我們需要證明冪????的元素(項)不會增長得太快。
我們用????表示矩陣 A 元素的最大絕對值,即滿足以下條件的最小實數:
(5.4.14)??????? ??(對于所有 i,?j ) 。
其基本屬性為:
引理 5.4.15? 令 A 和 B 為復 n × n 矩陣。則? ??,且對于所有 k > 0 , 有?,且對于所有 k > 0 , 有??
? 。
證明:
??? 我們估算 AB? 的 i?,?j 元素的大小:
? ?。
第二個不等式是通過第一個不等式歸納得出的。
現在我們估算指數級數:令 a 為一個正實數,且使得????。根據引理得到
??( 為簡單起見 n 取1 ) 。因此
(5.4.16)??
?。
比率驗證表明,最后一個級數收斂(顯然收斂于????) 。 根據定理 5.4.11,?
??的級數對于所有? ?
?(?
?)??絕對且一致收斂于。
定理 5.4.4 之證明。
??? (b),(c):? ?我們使用一種技巧來縮短證明。即,首先微分???的級數。假設 A 和 B 是可交換的 n × n 矩陣。tA + B 的導數是 A ,且?
(5.4.17)??????? 。
使用乘積法則 (5.3.6) 我們可以看到,對于 k > 0 , 這個級數的 k 次項的導數是
? 。
因為 AB = BA,我們可以將中間的 A 拉到左邊:
(5.4.18)
? 。
這是矩陣 A 與指數級數的 (k - 1) 次項之積。因此對 (5.4.17) 逐項微分即可得出????的級數。
為了驗證逐項微分,我們應用定理 (5.4.4) (a)。定理表明,對于已知的 A和 B ,指數級數????在任意區間 r ≤ t ≤ s? 一致收斂。此外,導數級數一致收斂于???
???。
根據定理 5.4.12 ,???的導數可以逐項計算,因此對于任意可交換的矩陣對 A ,B ?,有
? 。
取 B? = 0 可證明定理 (5.4.4) (b) 。
??? 接下來,我們復制定理 5.4.9 的證明中所使用的方法。我們微分乘積
? ,同樣,假設 A和 B 可交換。同在 (5.4.10) 一樣,我們求得
? ?。
因此 ,????,其中,C 是一個常量矩陣。令 t = 0 可證明?
???。令 B = 0 即證明?? ?
??。 則??
? 。令 t = 1 證明?
??。這樣就證明了定理 (5.4.4)(c) 。
我們將在第 9 章中再次使用矩陣指數的顯著性質。
I have not thought it necessary to undertake the labour ofa formal proof of the theorem in the general case.( 我認為沒有必要對一般情況下的定理進行形式化證明。
----------------------------------------Arthur Cayley(注:Cayley-Hamilton以其名字命名的數學家之一,他在他的一篇論文中提出了 n × n ?矩陣的該定理,然后檢驗了 2×2 的情況(參見 5.2.4)。他用這里引用的這句話結束了對該定理的討論。)
內容來源:
<<Algebra>> ?Michael Artin, 2th



超級簡單)





:vlan/DHCP/Web/HTTP/動態PAT/靜態NAT)




如何在工廠MOM功能設計和系統落地)



Finite State Machines 更新中...)
)