目錄
1.課題概述
2.系統仿真結果
3.核心程序與模型
4.系統原理簡介
4.1 控制系統概述
4.2 ADRC基本框架
4.3 控制律設計
5.完整工程文件
1.課題概述
? ? ? ? 基于ADRC自抗擾算法的UAV飛行姿態控制系統simulink建模與仿真,分別對YAW,PITCH,ROLL進行控制實現UAV的姿態控制。
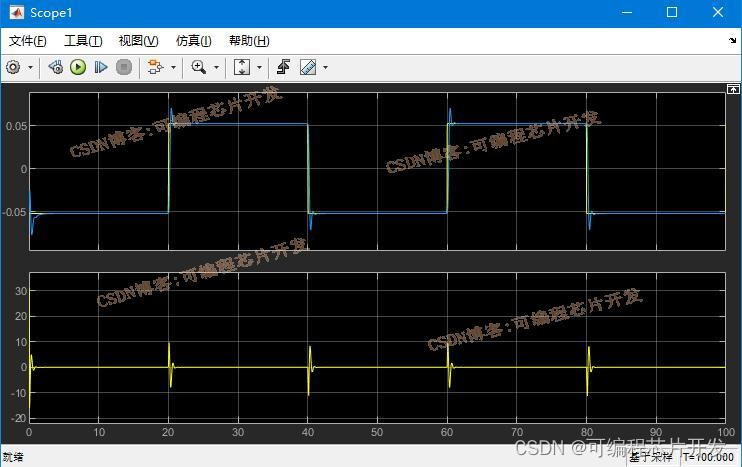
2.系統仿真結果
(完整程序運行后無水印)



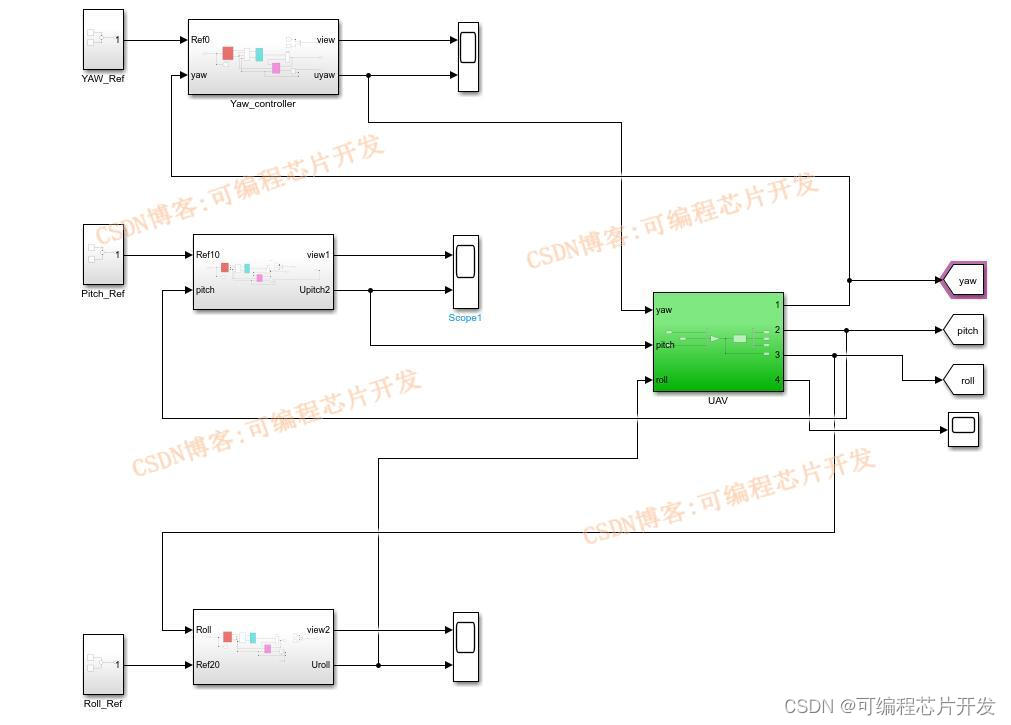
3.核心程序與模型
版本:MATLAB2022a
0071
4.系統原理簡介
? ? ? ? 在無人機(Unmanned Aerial Vehicle, UAV)飛行姿態控制中,應用自抗擾控制算法(Active Disturbance Rejection Control, ADRC)對偏航(Yaw)、俯仰(Pitch)和滾轉(Roll)三個軸向進行精確控制,是確保無人機穩定飛行和完成復雜任務的關鍵。ADRC以其模型簡化能力和對未知擾動的高效抑制能力,特別適合于解決無人機控制中面臨的非線性、時變性及模型不確定性問題。
4.1 控制系統概述
? ? ? ?UAV的飛行姿態控制主要是通過調整其動力系統(如電機速度)來改變螺旋槳產生的推力和扭矩,進而控制無人機在三維空間中的姿態。偏航、俯仰和滾轉的控制分別對應無人機繞其自身坐標系的Z軸、Y軸和X軸的旋轉。
4.2 ADRC基本框架
? ? ? ? ADRC的核心思想是將控制對象視為一個理想模型與未知總擾動的組合,并通過擴展狀態觀測器(Extended State Observer, ESO)估計這個總擾動,然后在控制器設計中考慮并抵消擾動影響。對于UAV姿態控制,理想模型通常簡化為一階或二階系統,而ESO則用于實時估計系統狀態和擾動。
4.3 控制律設計

? ? ? ?基于ADRC的UAV飛行姿態控制系統,通過ESO實時估計狀態和擾動,結合非線性反饋控制策略,為偏航、俯仰和滾轉三個軸向提供了有效的控制手段。該方法不僅減少了對精確系統模型的依賴,而且顯著增強了系統的魯棒性和適應性,尤其是在面對外部干擾和模型不確定性時。通過精細的參數調整和優化,ADRC可確保UAV在復雜環境中的穩定飛行和精確控制,是實現自主導航和執行高級任務的重要技術支撐。
5.完整工程文件
v





)











】)

