目錄
- 從特征組合說起
- FM模型
- 1.原理
- 2.模型訓練
- 3.預測階段
- 4.一網打盡其他模型
- 5.FFM
- 總結
在上一篇文章中,我們講到了使用邏輯回歸和梯度提升決策樹組合的模型融合辦法,用于CTR預估,給這個組合起了個名字,叫“輯度組合”。這對組合中,梯度提升決策樹GBDT,所起的作用就是對原始的特征做各種有效的組合,一顆樹一個葉子節點就是一種特征組合。
從特征組合說起
從邏輯回歸最樸素的特征組合就是二階笛卡爾乘積,但是這種暴力組合存在如下問題:
1.兩兩組合導致特征維度災難;
2.組合后的特征不見得都有效,事實上大部分可能無效;
3.組合后的特征樣本非常稀疏,即組合容易,但是樣本中可能不存在對應的組合,也就沒辦法在訓練時更新參數。
如果把包含了特征兩兩組合的邏輯回歸線性部分寫出來,就是:
y ^ = ω 0 + ∑ i = 1 n ω i x i + ∑ i = 1 n ∑ j = j + 1 n ω i j x i x j \hat{y} = ω_0 +\sum_{i=1}^n{ω_ix_i} +\sum_{i=1}^n\sum_{j=j+1}^n{ω_{ij}x_ix_j} y^?=ω0?+i=1∑n?ωi?xi?+i=1∑n?j=j+1∑n?ωij?xi?xj?
這和原始的邏輯回歸相比,多了后面的部分,特征兩兩組合,也需要去學習對應的參數權重。
問題是兩兩組合后可能沒有樣本能歐學習到$w_{ij},在應用中,對于這些組合,也只能放棄,因為沒有學到權重。
針對這個問題,就有了一個新的算法模型:因子分解機模型,也叫FM,即Factorization Machine。因子分解機也常常用來做模型融合。
FM模型
1.原理
因子分解機模型是在2010年被提出,因為邏輯回歸在做特征組合時樣本稀疏,無法學習到很多特征組合的權重,所以因子分解機的提出者就想,能否對上面那個公式中的 w i j w_{ij} wij?做解耦,讓每一個特征學習一個隱因子向量出來。
正如矩陣分解時,為每一個用戶和每一個物品各自都學習一個隱因子向量,這樣,任何兩個特征需要組合時,只需隱因子變量做向量點積,就是兩者組合特征的權重了。
針對邏輯回歸的線性部分:
y ^ = ω 0 + ∑ i = 1 n ω i x i + ∑ i = 1 n ∑ j = i + 1 n < v i , v j > x i x j \hat{y} =\omega_{0} + \sum_{i=1}^n{\omega_{i}x_{i}} + \sum_{i=1}^{n}{\sum_{j=i+1}^{n}}{<v_i,v_j>x_ix_j} y^?=ω0?+i=1∑n?ωi?xi?+i=1∑n?j=i+1∑n?<vi?,vj?>xi?xj?
這個公式和前面特征組合的公式相比,不同之處就是原來有個\omega_{ij},變成了兩個隱因子向量的點積<V_i,V_j>。
它認為兩個特征之間,即便沒有出現在一條樣本中,也是有間接聯系的。比如特征A和特征B,出現在一些樣本中,特征B和特征C也出現在一些樣本中,那么特征A和特征C無論是否出現在一些樣本中,我們有理由認為兩個特征仍然有些聯系。
如果在實際預測CTR時,特征A和特征C真的同時出現在一些樣本中,如果你用的是因子分解模型,你可以直接取特征A和特征C的隱因子向量,進行點積計算,就得到兩者組合的權重。因子分解機的先進之處就在于此。
既然二階組合特征可以學到隱因子向量,那么三階、四階、五階呢?實際上,組合越多,計算復雜度就會陡增,一般在實際使用中,因子分解機多用在二階特征組合中。
2.模型訓練
因子分解機的參數學習并無特別之處,看目標函數,這里是把他當做融合模型來看的,用來做CTR預估,因預測目標是一個二分類,因子分解機的輸出還需要經過sigmoid函數變換:
σ ( y ^ ) = 1 1 + e ? y ^ \sigma(\hat{y}) =\frac{1}{1+ e^{-\hat{y}}} σ(y^?)=1+e?y^?1?
因此損失目標函數為:
l o s s ( θ ) = ? 1 m ∑ i = 1 m [ y ( i ) l o g ( σ ( y ^ ) ) + ( 1 ? y ( i ) ) l o g ( 1 ? σ ( y ^ ) ] loss(\theta) = - \frac{1}{m}\sum_{i=1}^m{[y^{(i)} log(\sigma(\hat{y})) + (1-y^{(i)})log(1-\sigma(\hat{y}) ]} loss(θ)=?m1?i=1∑m?[y(i)log(σ(y^?))+(1?y(i))log(1?σ(y^?)]
公式中 σ ( y ^ ) \sigma(\hat{y}) σ(y^?) 是因子分解機的預測輸出后經過sigma函數變換得到的預估CTR, y ^ \hat{y} y^?是真實樣本的類別標記,正樣本為1,負樣本為0,m是樣本總數。
對于這個損失目標函數使用梯度下降或者隨機梯度下降,就可以得到模型的參數,注意函數實際上還需要加上正則項。
3.預測階段
因子分解機中二階特征組合那一部分,在實際計算時,復雜度有點高,如果隱因子向量的維度是k,特征維度是n,那么這個復雜度為O(kn^2),其中n方是特征要兩兩組合,k是每次組合都要對k維向量計算
點積。需稍微改造一下,改造過程如下:
loop1 begin: 循環k次,k就是隱因子向量的維度,其中,循環到第f次時做以下事情loop2 begin:循環n個特征,第i次循環時做這樣的事情1. 從第i個特征的隱因子向量中拿出第f維的值2. 計算兩個值:A是特征值和f維的值相乘,B是A的平方loop2 end把n個A累加起來,并平方得到C,把n個B也累加起來,得到D用C減D,得到Eloop1 end把k次循環得到的k個E累加起來,除以2這就是因子分解機中,二階組合部分的實際計算方法,目前復雜度下降為O(kn)。
4.一網打盡其他模型
下面繼續帶你見識一些因子分解機的神奇之處。看下面這張圖:
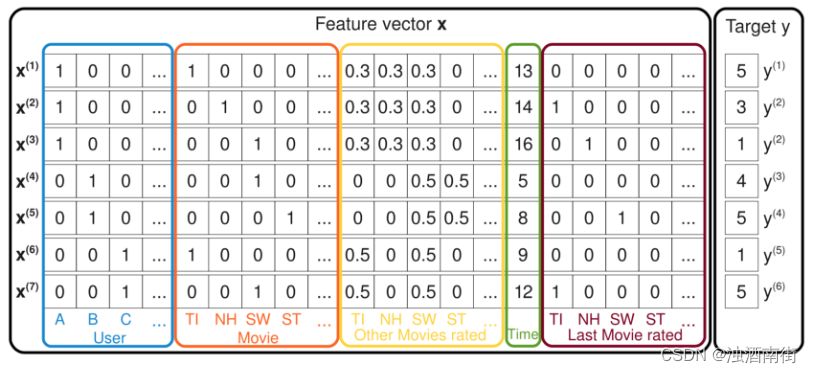
下面繼續帶你見識一些因子分解機的神奇之處。看下面這張圖:
這張圖中的每一條樣本都記錄了用戶對電影的評分,最右邊的y是評分,也就是預測目標;左邊的特征有五種,用戶ID、當前評分的電影ID、曾經評過的其他分、評分時間、上一次評分的電影。
現在我們來看因子分解機如何一網打盡其他模型的,這里說的打敗是說模型可以變形成其他模型。
前面例子,因子分解機實現了帶有特征組合的邏輯回歸。
現在假設圖中的樣本特征只留下用戶ID和電影ID,因子分解機模型就變成:
y ^ = ω 0 + ω u + ω i + < V u , V i > \hat{y} =\omega_{0} + \omega_{u} + \omega_{i} + <V_{u},V_{i}> y^?=ω0?+ωu?+ωi?+<Vu?,Vi?>
用戶ID和電影ID,在一條樣本中,各自都只有一個維度1,其他都是0。所以在一階部分就沒有了求和符號,直接是 w u w_u wu?和 w i w_i wi?,二階部分乘積也只剩下了1,其他都為0,就轉變為偏置信息的SVD。
繼續,在SVD基礎上把樣本中的特征加上用戶歷史評分過的電影ID,再求隱因子向量,就轉變為SVD++;再加上時間信息,就變成了time-SVD。
因子分解機把前面講過的矩陣分解一網打盡了,順便還干起了邏輯回歸的工作。正因為如此,因子分解機常常用來做模型融合,在推薦系統的排序階段肩負起對召回結果做重排序的任務。
5.FFM
在因子分解機基礎上可以進行改進,改進思路是:不但認為特征和特征之間潛藏著一些關系,還認為特征和特征類型也有千絲萬縷的關系。
這個特征類型,就是某些特征實際上來自數據的同一個字段。比如用戶id,占據了很多維度,變成了很多特征,但他們都屬于同一個類型,都叫做用戶ID。這個特征類型就是字段,即Field.所以這種改進叫做Field-aware Factorization Machines ,簡稱FFM。
因子分解機模型如下:
KaTeX parse error: Expected group after '_' at position 42: …_{i=1}^n{\omega_?}
總結
今天,我給你介紹了另一種常用來做CTR預估的模型,因子分解機。因子分解機最早提出在2010年,在一些數據挖掘比賽中取得了不錯的成績,后來被引入到工業界做模型融合,也表現不俗。
嚴格來說,因子分解機也算是矩陣分解算法的一種,因為它的學習結果也是隱因子向量,也是用隱因子向量的乘積來代替單個權重參數。





】)


)



 源碼學習)
一款輕量級的開源文本標注工具(二))



)

