1. 模塊介紹
Simulink提供了專門用于電力系統仿真,包括電機的動態建模和控制的電機模型,其中,永磁同步電機模塊 Permanent Magnet Synchronous Machine 支持實現三相或五相永磁同步電機模擬,電機繞組采用星型連接,在這種連接方式中,電機繞組的一端連接在一起形成一個公共點,通常稱為中性點(Neutral Point),而另一端則分別連接到三相電源。
三相PMSM可以設置正弦電動勢和梯形電動勢兩種不同的電動勢波形,對于正弦波形電機,轉子可以是圓的或凸極的。當電動勢波形呈梯形時,轉子為圓形。五相PMSM則默認為正弦電動勢波形和圓形轉子。
正弦模型假定定子內永磁體所產生的磁通是正弦的,這就意味著電動勢是正弦的。梯形模型假設永磁體的繞組分布和磁通產生三個梯形反電動勢波形。
PMSM在發電機或電機模式下運行。操作模式由機械轉矩的符號決定(電機模式為正,發電機模式為負)。機器的電氣部分和機械部分分別由二階狀態空間模型表示。
2. 模塊參數配置
在Matlab2021b中,PMSM的模型設置對話框中,包含了兩個部分:Configuration(配置)、Parameters (參數設置)。下面將對每個部分進行詳細介紹。
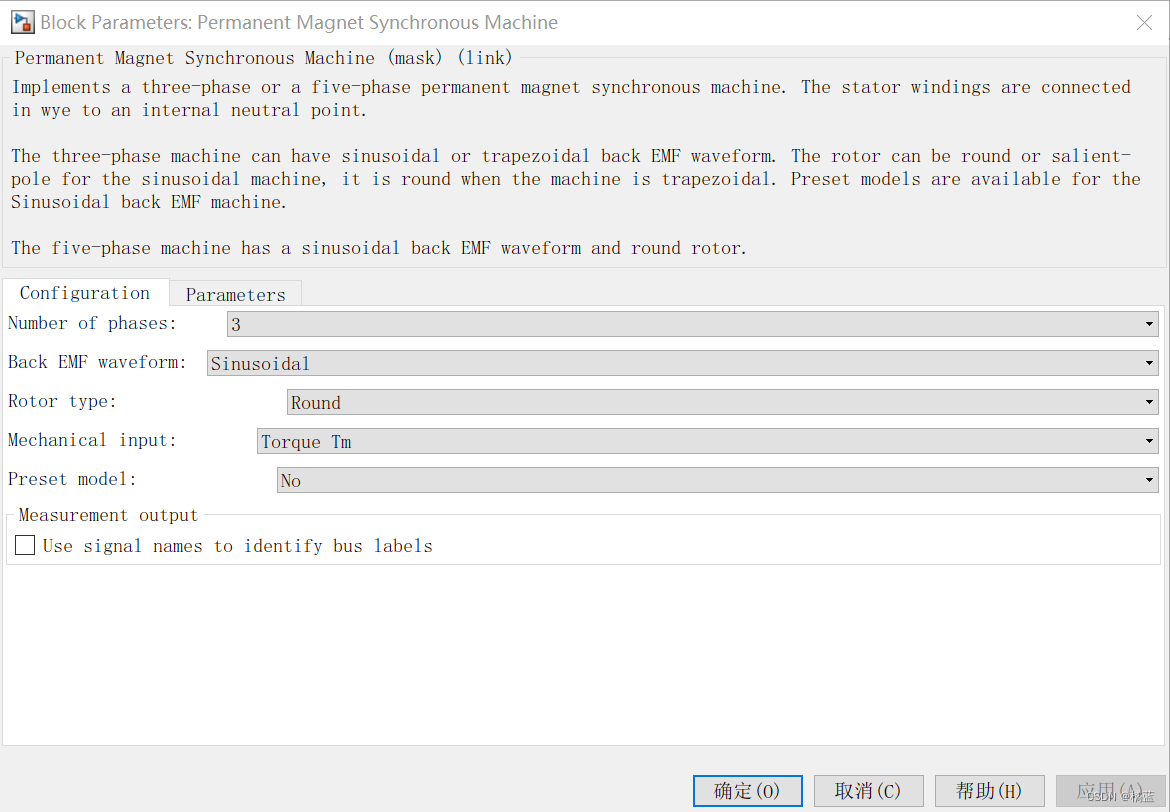
(1) Configuration(配置)
① Number of phases(相數): 里面包含“3”和“5”兩個選項。當選擇“3”時表示為三相PMSM,當選擇“5”時表示為五相PMSM。當Back EMF waveform被設置成Trapezoidal方式,或者Number of phases被設置成五相時,將不能進行Rotor type(轉子類型)和Preset model(電機的類型)的選擇。
② Back EMF waveform(反電動勢波形): 里面包含Sinusoidal和Trapezoidal兩個選項。選擇Sinusoidal表示此PMSM為正弦波激勵,選擇Trapezoidal表示此PMSM為梯形波激勵。無論選擇哪種激勵方式,Number of phases都將不能設置為5。
③ Rotor type(轉子類型): 里面包含Round和Salient-pole兩個選項。選擇Sa-lient-pole表示電機轉子為凸極型,選擇Round表示電機轉子為圓柱形。
④ Mechanical input(機械輸入方式): 里面包含Torque Tm、Speed和Mechani-cal rotational三個選項。其中,較為常用的是前兩個,Torque Tm表示負載轉矩,Speed表示機械角速度。
⑤ Preset model(電機的類型): 里面包含No和各種功率等級的電機選項。當選擇No時,可以對電機的參數進行修改;當選擇其他類型的電機時,電機參數已經確定,將不能對電機的參數進行設置。
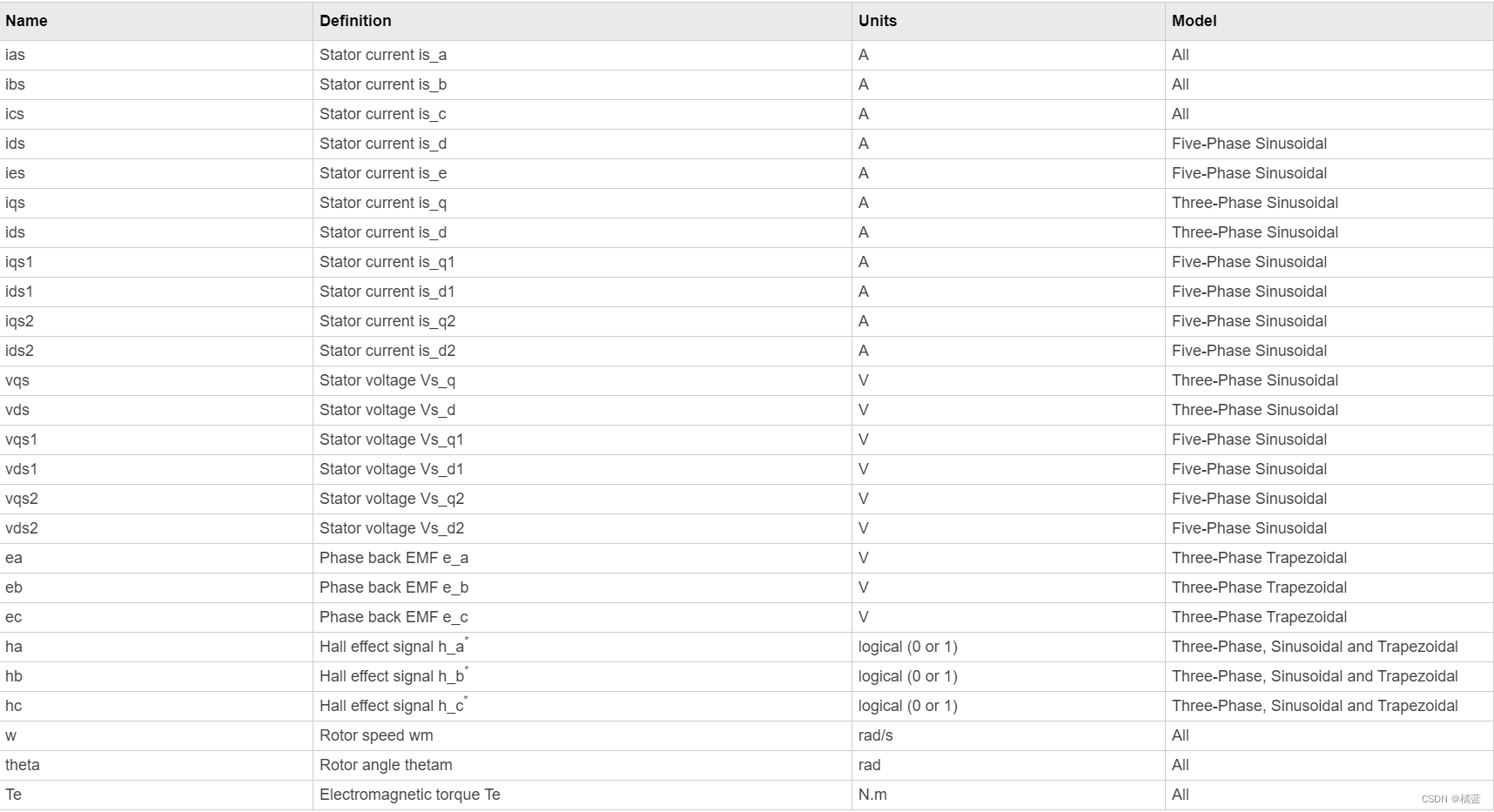
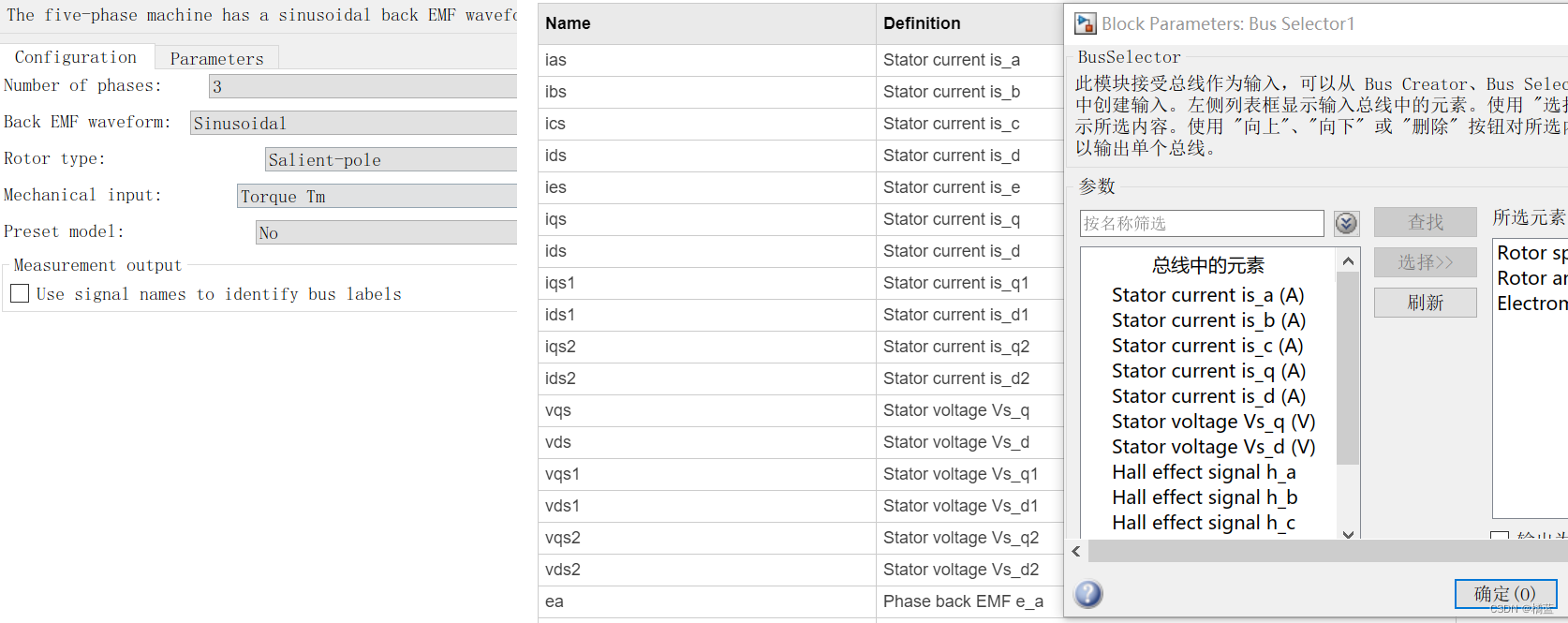
⑥ Measurement Output(輸出尺寸參數名稱設置): 設置輸出總線中元素的名稱,當勾選Measurement Output時,總線中元素名稱為Name,不選則為Defintion所述名稱。這些元素包括:
勾選Measurement Output: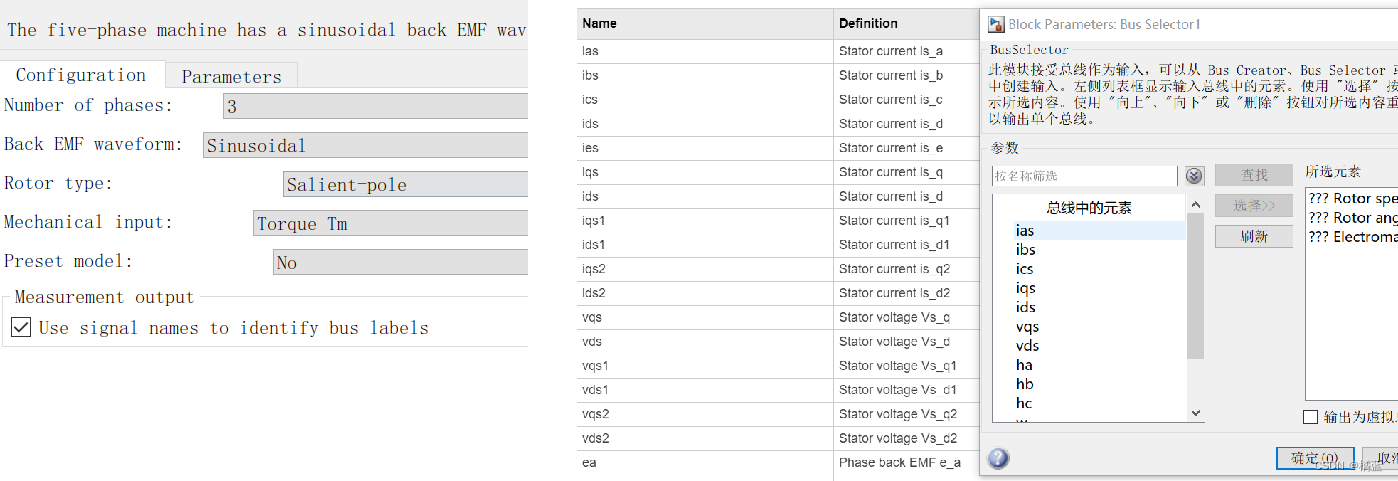
不勾選Measurement Output:
(2)Parameters(參數設置)
當選擇Parameters時,其顯示界面如圖所示。此時,Number of phases 設置為3,Back EMF waveform設置為Sinusoidal,Rotor type設置為Salient-pole。
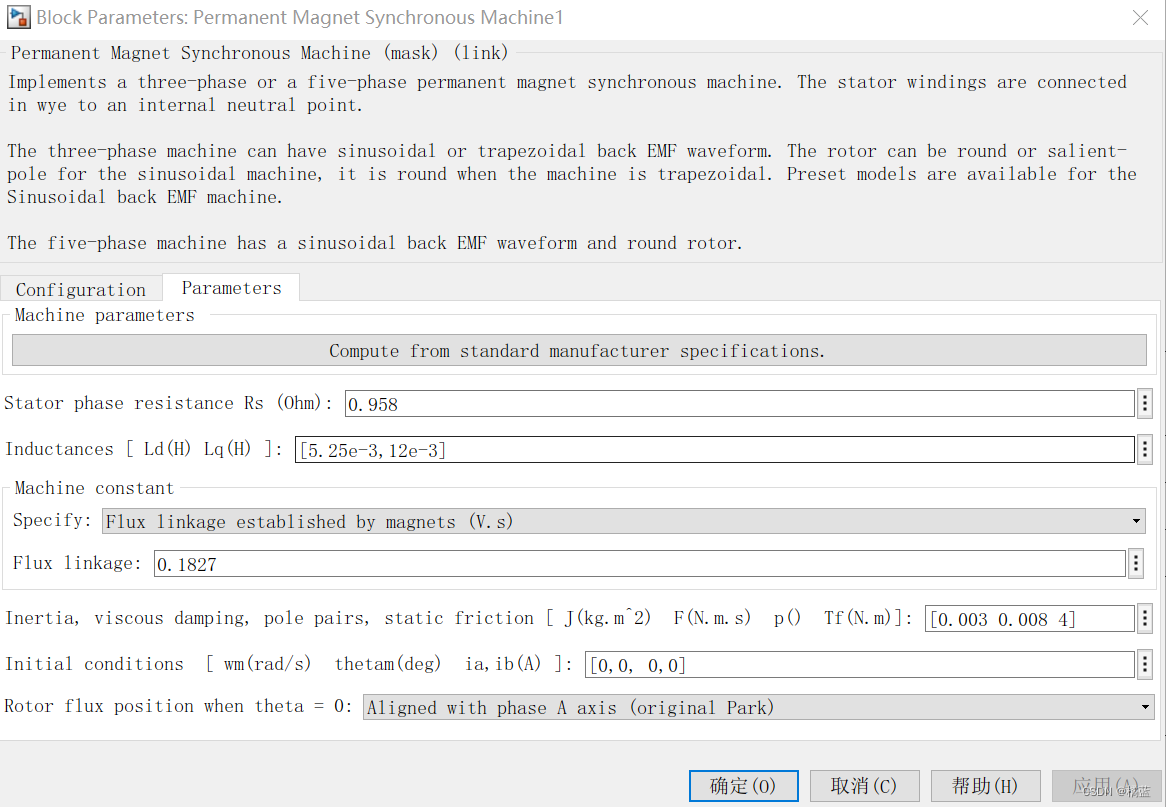
① Stator phase resistance Rs(ohm)(定子電阻);設置電機定子電阻的大小,單位為Ω。
② Inductances Ld(H)Lq(H);設置電機定子電感的大小,單位為H。
③ Machine constant(電機常量值):當Specify選擇Flux linkage established by magnets(V.s)時,可以對Flux linkage(永磁體磁鏈)進行設置大小,單位為Wb;當Specify選擇Voltage Constant時,可以對Voltage Constant進行設置大小,單位為V/krpm;當Specify選擇Torque Constant時,可以對Torque Constant進行設置大小,單位為N·m。
④ Inertia,viscous damping,pole pairs, static friction[J(kg·m-2)]:可以分別設置電機的轉動慣量、阻尼系數和極對數,viscous damping通常設置為0。
⑤ Initial conditions wm(rad/s) thetam(deg) ia,ib(A):可以設置包括機械角速度、轉子位置、相電流ia和ib在內的數值大小。
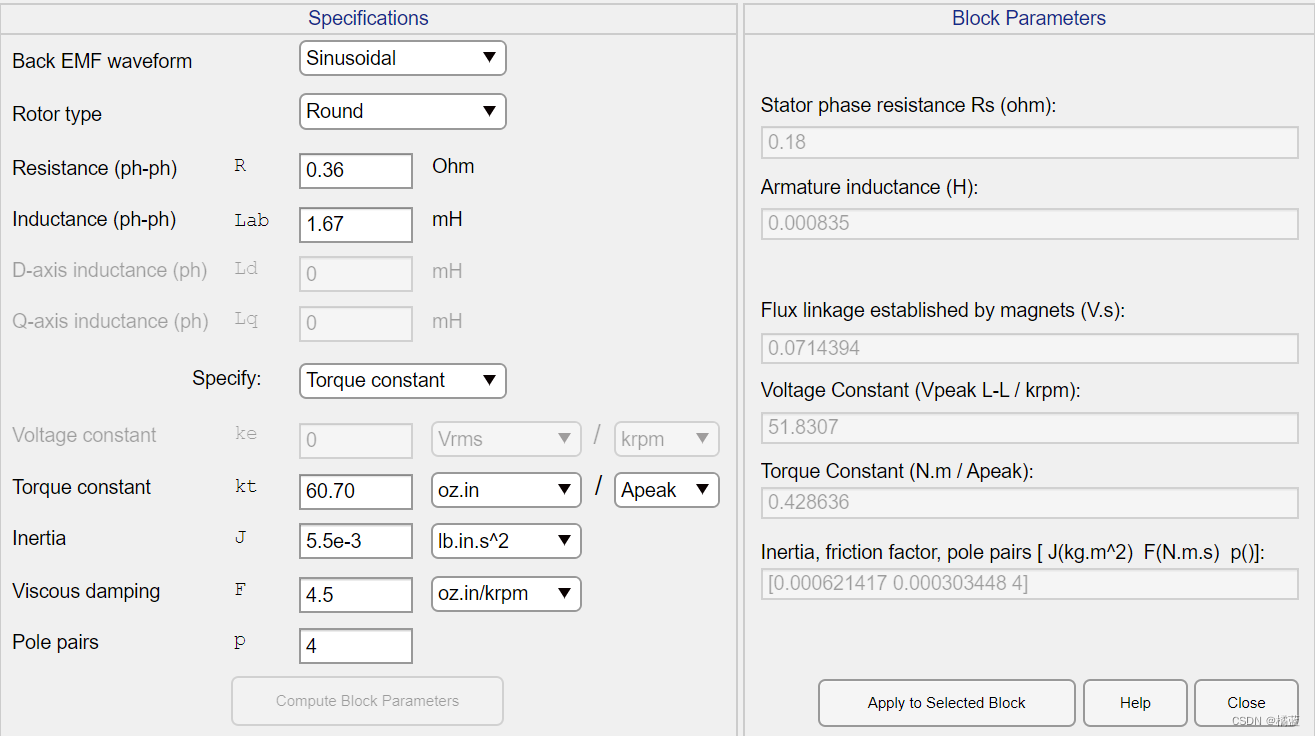
⑥ Machine parameters(電機參數計算):打開該對話框可根據制造商提供的電機參數快速計算模塊的相關參數進行配置。

(3) 輸入輸出
① Tm(機械轉矩):這個輸入端口通常是正的,因為永磁同步電機塊通常用作電機。如果選擇在發電機模式下使用TMSM,則可以應用負轉矩輸入。
② m(輸出尺寸): 矢量包含測量信號。當相位數設置為3時,塊返回一個13元素的向量,當相位數設置為5時,塊返回一個16元素的向量。可用的信號取決于您選擇的型號。您可以使用Simulink?庫(參考Matlab幫助頁)中提供的總線選擇器塊將這些信號解復用。在介紹Measurement Output(輸出尺寸參數名稱設置)參數時已經介紹了輸出總線元素表,如上圖所示。
③ Physical Modeling連接端口 A B C:在Simulink中,Physical Modeling連接端口是用于物理建模的專用端口,它們允許用戶在模型中創建和表示物理連接。這些端口特別適用于那些需要模擬物理系統動態行為的模型,比如機械、電氣或液壓系統。
PMSM的ABC三個端口通常與三相電源轉換器相連,該轉換器由多達六個以橋接配置連接的電源開關組成,為電機模塊提供三相正弦電壓源。
3. 電機控制仿真
本文主要講解PMSM的參數配置,構建PMSM控制系統需要了解三相電壓方程及其坐標變換、PWM技術、電流控制或直接轉矩控制方法,以PI調節器為基礎構建矢量控制系統模型如下:
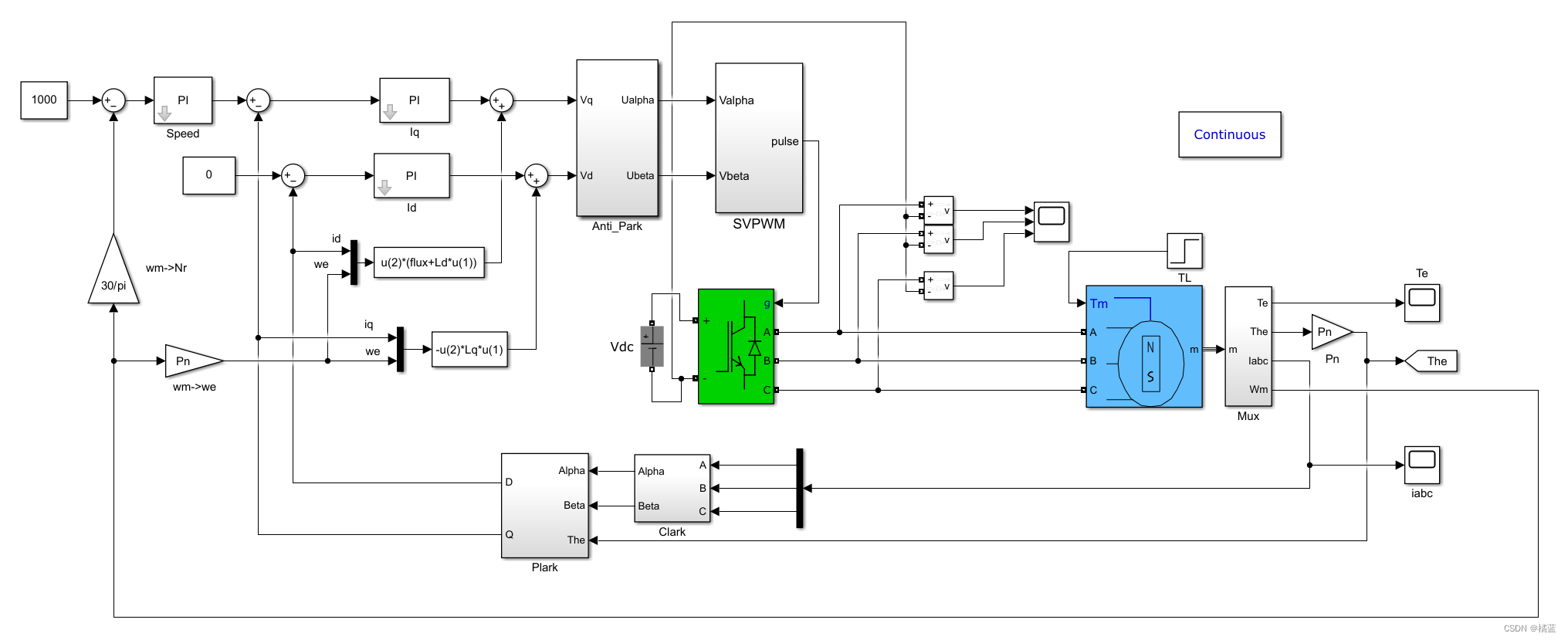
給定參考轉速為1000r/min,在t=0.2時負載轉矩由0變為10,驗證系統是否能快速響應。結果如下:
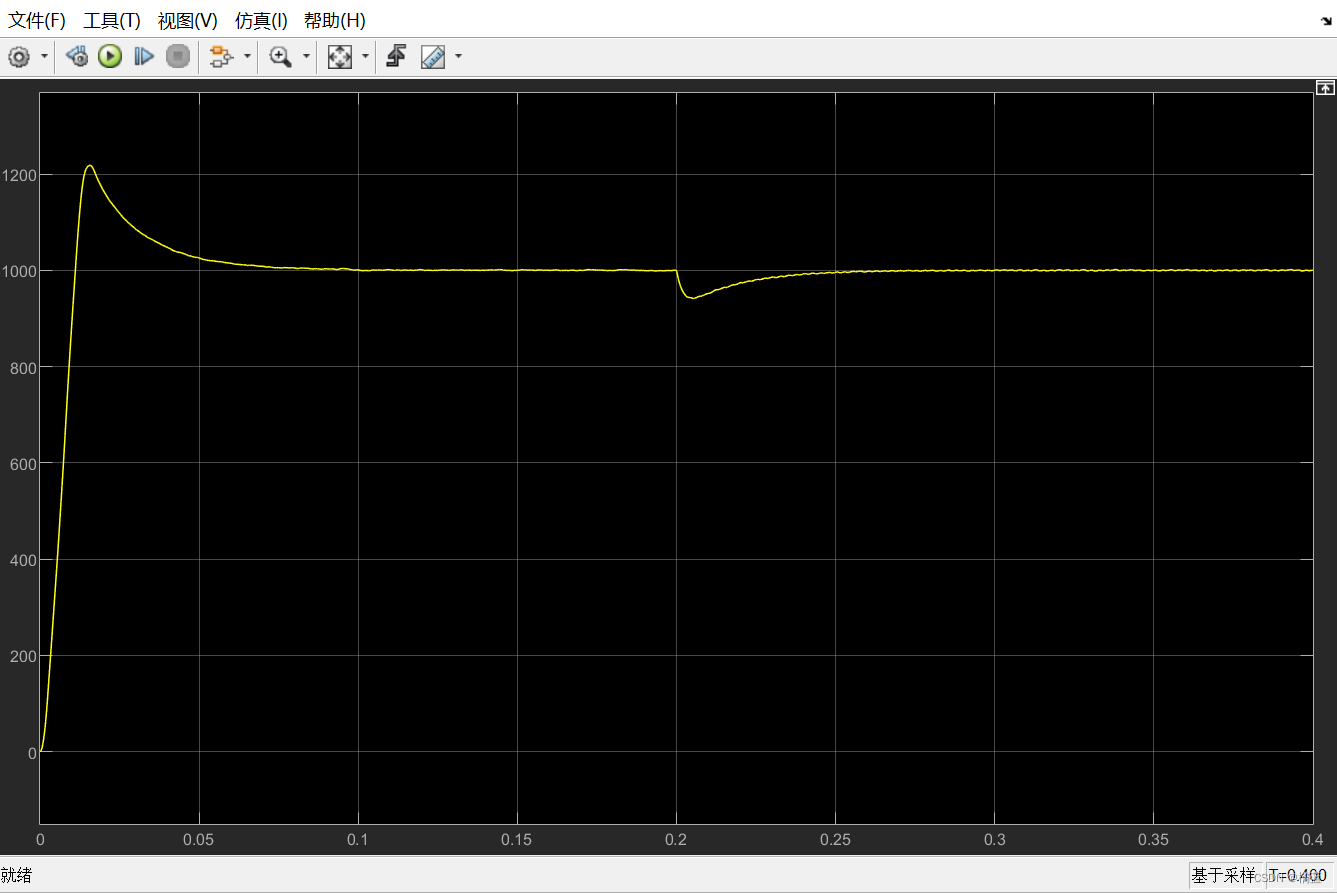
從以上仿真結果可以看出,當電機從零速上升到參考轉速1000r/min時,雖然開始時電機轉速有一些超調量,但仍然具有較快的動態響應速度,并且在t=0.2s時突加負載轉矩T?=10N·m,電機也能快速恢復到給定參考轉速值。
4. 參考
1.現代永磁同步電機控制原理_袁雷
2.MATLAB & Simulink - MathWorks 中國


)











】)


)

