本文簡要闡述STK中光照計算的模型。
在航天任務中,通常需要分析地面站、飛行器在一定時間內的光照情況,具體包括:
- 地面站處在光照區和陰影區的具體時間范圍;
- 考慮地形遮擋后,地面站的光照區和陰影區的變化情況;
- 飛行器繞地飛行過程中,處于光照區和陰影區的具體時間范圍;
- 地面站當地水平系下,太陽方位角、高度角的變化;
- 飛行器軌道器或本體系下,太陽方位角、高度角的變化。
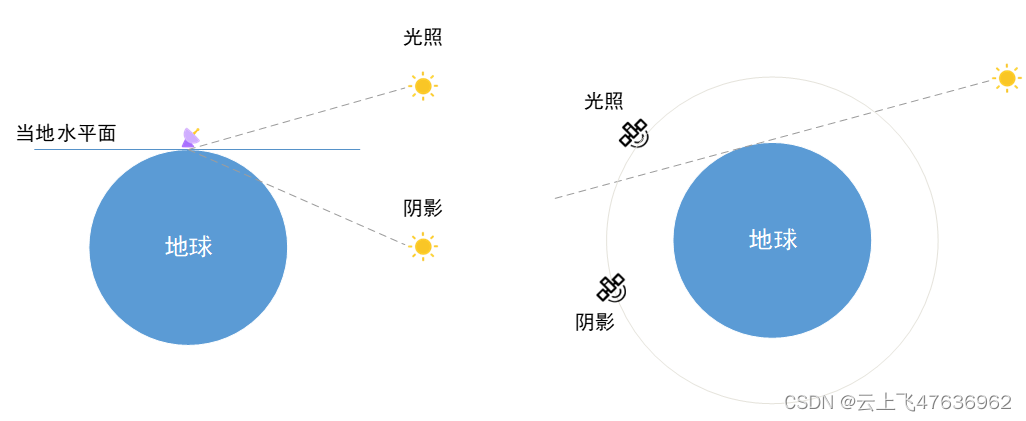
光照計算時,主要考慮的是地球對太陽的遮擋(其它天體也是類似的),見下圖所示地面站和飛行器的光照示意圖。
對于地面站(左圖),考慮地球遮擋,當太陽在當地水平面之上時(對應的太陽的高度角大于0),即地面站為光照狀態;反之則為陰影狀態。
對于空間飛行器(上面右圖),如衛星,當飛行器與太陽連線不被地球遮擋時,則飛行器為光照狀態;反之則為陰影狀態。
實際計算時,地球形狀考慮為橢球體。
下面根據以上所涉及到的光照場景,詳細討論。
坐標系及太陽方位角、高度角
涉及到太陽位置計算時,通常涉及到太陽的方位角和高度角概念,因此首先確定好常用的坐標系和太陽方位角和高度角的定義。
地面站地平坐標系
地面站觀測太陽時,采用當地水平坐標系(也稱北東地坐標系),簡稱LH坐標系(Local Horizontal),其定義如下:
- X軸指向當地北方向;
- Y軸指向當地東方向;
- Z軸指向當地天底方向。
XY平面為當地水平面,垂直于地球橢球體法線,見下圖。

下圖給出了地面站LH系下的太陽方位角和高度角。

飛行器VVLH系
飛行器觀測太陽時,通常采用軌道坐標系,簡稱VVLH坐標系(Vehicle Velocity, Local Horizontal),其定義如下:
- X軸約束在慣性系速度方向(由Y叉乘Z得到);
- Y軸指向軌道面負法向;
- Z軸指向地心方向。
下圖為飛行器的VVLH坐標系以及太陽方向矢量的高度角和方位角示意圖。

太陽方位角和高度角
在地面站地平坐標系或者飛行器VVLH坐標系中,太陽方位角(Azimuth,簡稱Az)和高度角(Elevation,簡稱El)的定義如下圖。

- 方位角定義為:X軸與太陽方向矢量在XY平面內的投影矢量的夾角,+X軸為零點,向+Y軸方向為正;
- 高度角定義為:太陽方向矢量與XY平面的夾角,-Z軸方向為正。
注意,對于飛行器本體坐標系(Body),則高度角以+Z軸方向為正。
根據以上定義,實際計算時,首先求得某時刻太陽(通常為視太陽)在地面站LH系或飛行器VVLH系的位置,設為 R s \textbf{R}_s Rs?:
R s = [ X s , Y s , Z s ] T \textbf{R}_s=\left[X_s,Y_s,Z_s\right]^T Rs?=[Xs?,Ys?,Zs?]T
則太陽方位角Az和高度角El計算如下:
{ A z = t a n 2 ? 1 ( Y s , X s ) E l = s i n ? 1 ( ? Z s / R s ) \left\{ \begin{aligned} Az=tan2^{-1}(Y_s,X_s) \\ El=sin^{-1}(-Z_s/R_s) \end{aligned} \right. {Az=tan2?1(Ys?,Xs?)El=sin?1(?Zs?/Rs?)?
光照計算模型
無論是地面站還是飛行器,在精確計算光照和陰影的時間時,必須考慮到以下因素:
- 太陽圓盤的大小,以及被遮擋的部分大小;
- 對于地面站,當地水平面附近地形遮擋的影響;
- 對于空間飛行器,考慮地球的遮擋。
同時,太陽的光照狀態分為以下三種情形:
- 光照:太陽圓盤完全不被遮擋,地面站或飛行器處于完全光照狀態,太陽光照強度因子為1;
- 半影:太陽圓盤部分被遮擋,地面站或飛行器處于半影狀態,太陽光照強度因為0-1之間的小數;
- 全影:太陽圓盤完全被遮擋,地面站或飛行器處于完全陰影狀態,太陽光照強度因子為0。
首先給出地面站的光照計算模型,見下圖。
某時刻,以觀測點為中心,視太陽方向的地形最大仰角為 α t \alpha_t αt?,視太陽中心(即太陽位置)方向與地形最大仰角方向的夾角為 α g \alpha_g αg?,太陽圓盤視半徑為 α s \alpha_s αs?。
不考慮地形時( α t = 0 \alpha_t=0 αt?=0), α g \alpha_g αg?即為視太陽方向與當地水平面的夾角,即太陽仰角El。
太陽圓盤視半徑 α s \alpha_s αs?由下式給出:
α s = s i n ? 1 R o R s \alpha_s=sin^{-1}{\frac{R_o}{R_s}} αs?=sin?1Rs?Ro??
上式中, R o R_o Ro?為太陽圓盤半徑,取值為695700km,對應的視半徑約為0.27°,具體數值與太陽的距離變化而稍有不同。

下圖為飛行器的光照計算模型示意圖。與地面站不同的是,不需要考慮地形的遮擋,轉而考慮地球的遮擋。
某時刻,以觀測點為中心,地心方向與地球邊緣方向的夾角(稱為地球視半徑)為 α t \alpha_t αt?,視太陽中心(即太陽位置)方向與地球邊緣方向的夾角為 α g \alpha_g αg?,太陽圓盤視半徑為 α s \alpha_s αs?。觀測點到地球的距離向量為 R E \textbf{R}_E RE?。

地球視半徑 α t \alpha_t αt?可由下式給出:
α t = s i n ? 1 R e R E \alpha_t=sin^{-1}{\frac{R_e}{R_E}} αt?=sin?1RE?Re??
上式中, R e R_e Re?為地球赤道半徑,常取6378.14km。
根據上述兩種光照模型,太陽光照狀態的判別依據如下:
{ 光照 : α g > α s 陰影 : α g < ? α s 半影 : ? α s ≤ α g ≤ α s \left\{ \begin{aligned} 光照: & \alpha_g>\alpha_s \\ 陰影: & \alpha_g<-\alpha_s \\ 半影: & -\alpha_s \leq \alpha_g\leq\alpha_s \end{aligned} \right. ? ? ??光照:陰影:半影:?αg?>αs?αg?<?αs??αs?≤αg?≤αs??



















