本文詳細介紹4D雷達相關解決方案,4D雷達關鍵詞:4D Imaging Radar
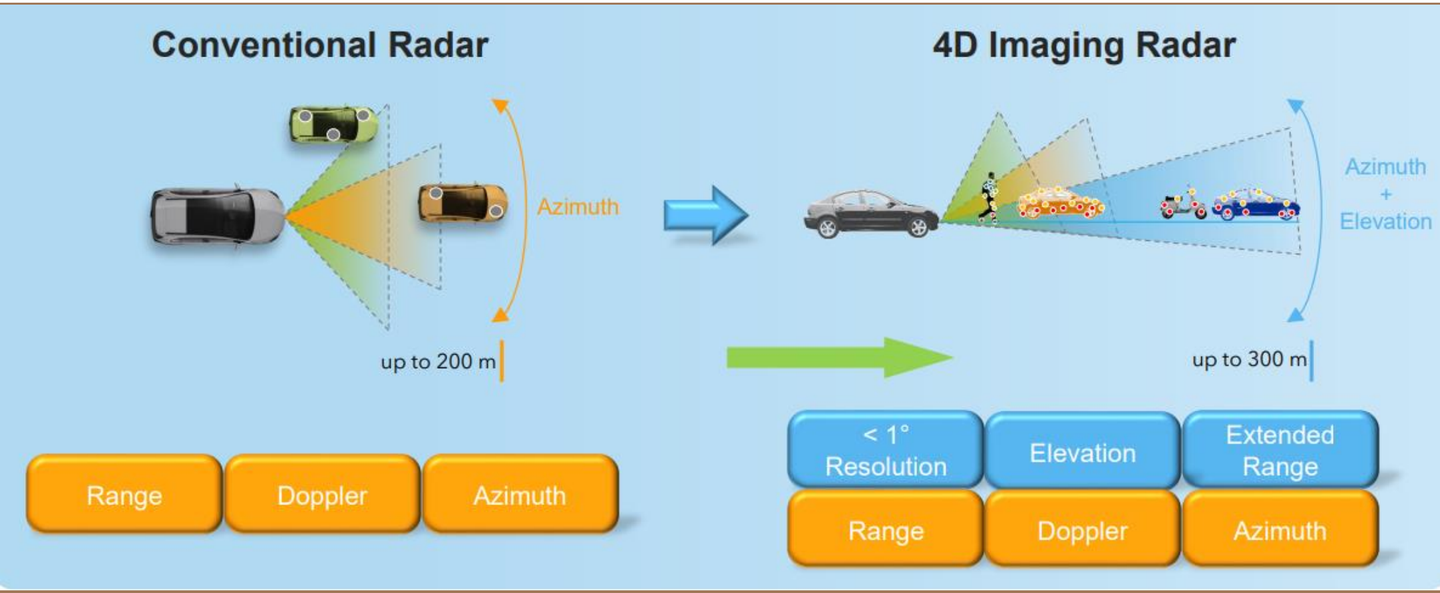
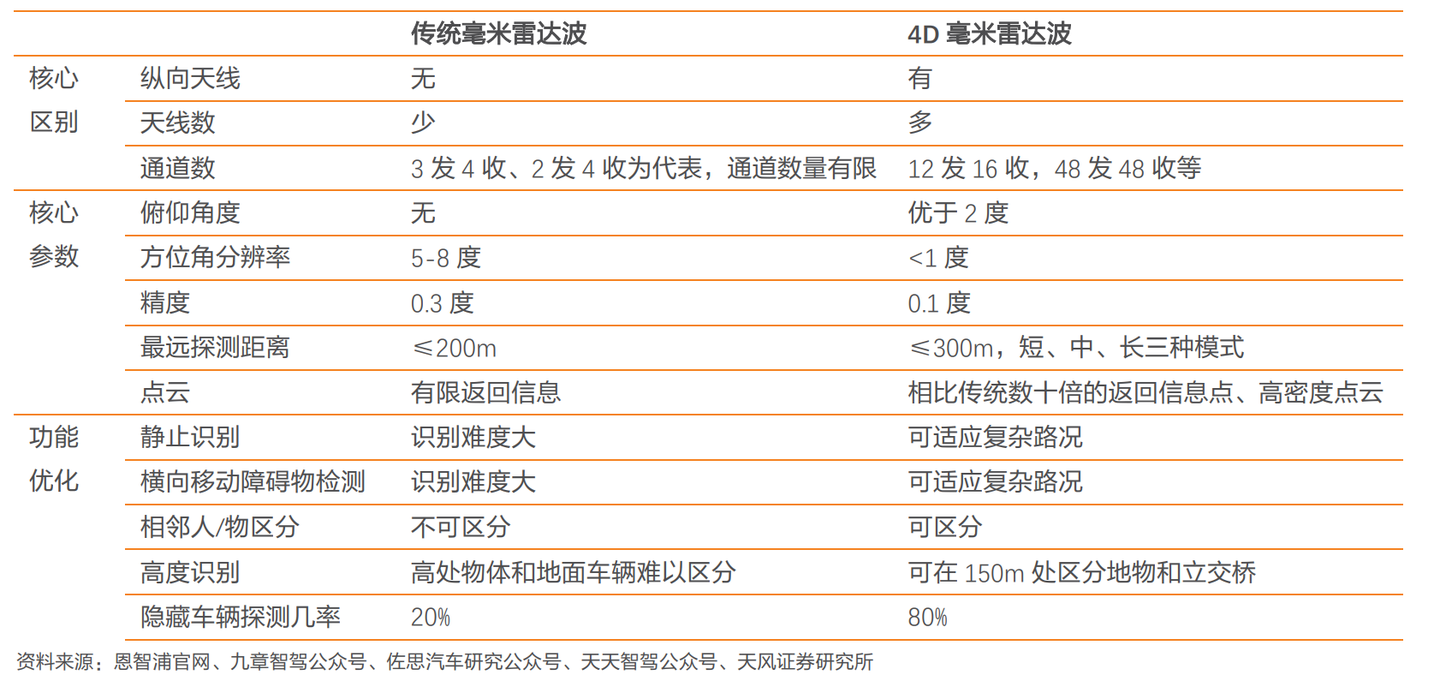
1、4D雷達特點

Ref:https://pdf.dfcfw.com/pdf/H3_AP202309071598013225_1.pdf
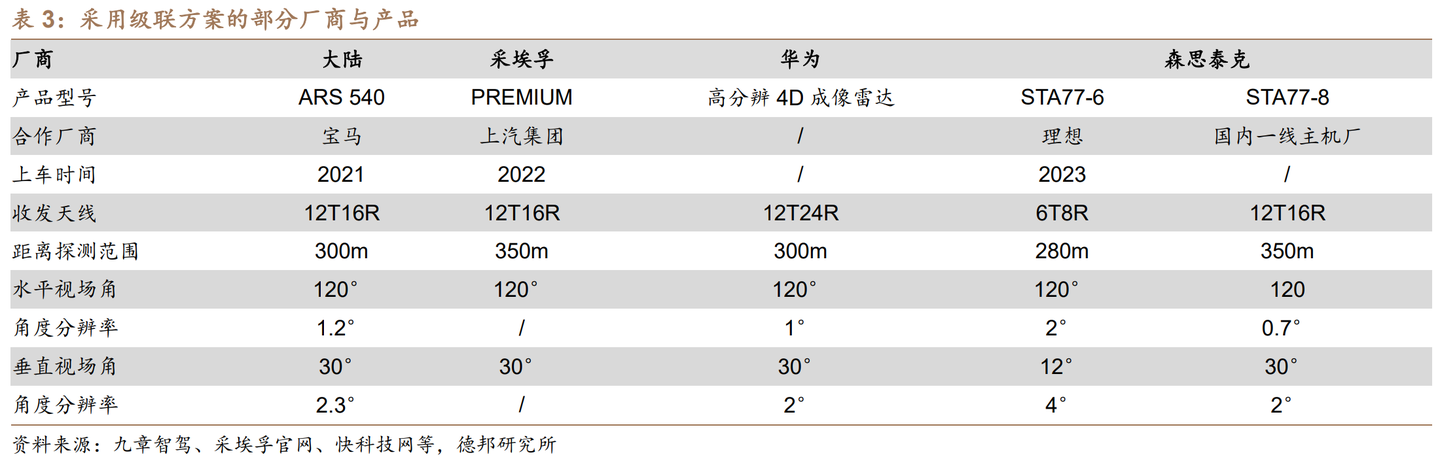
2、傳統三大家的4D雷達解決方案
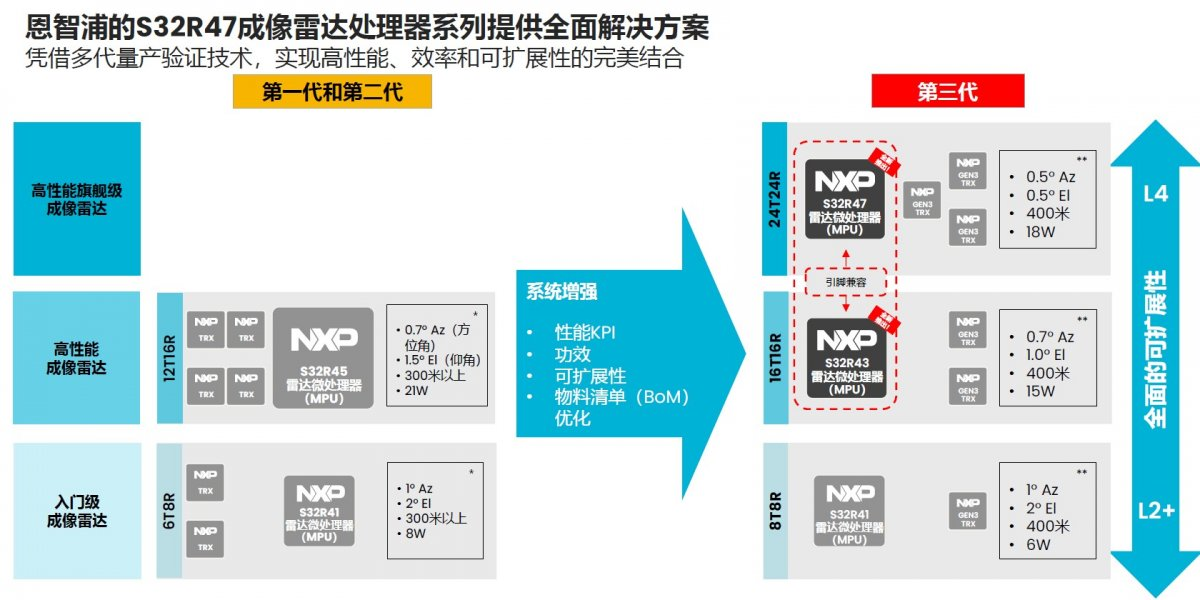
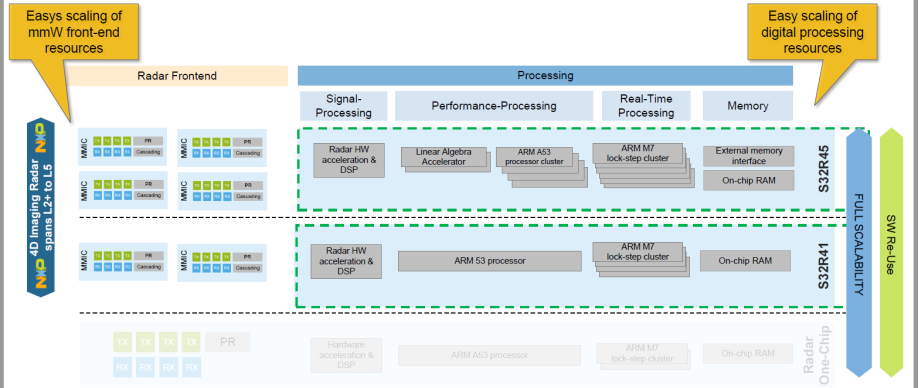
NXP
| MCU | 說明 | MMIC | 說明 |
|---|---|---|---|
| S32R29x | 支持2級聯(6T8R) | TEF82xx(3T4R) | 3T4R的單芯片MMIC,可級聯 |
| S32R41 | 支持2級聯(6T8R或8T8R) | TEF????(8T8R) | 某8T8R的單芯片MMIC,可級聯 |
| S32R45 | 支持4級聯(12T16R) | ||
| S32R43 | 支持2級聯(16T16R) | ||
| S32R47 | 支持3級聯(24T24R) |
Ref:https://www.eet-china.com/news/202507158519.html
TI
| MCU | 說明 | MMIC | 說明 |
|---|---|---|---|
| AM2732R | 支持2級聯(6T8R) | AWR2243(3T4R) | 3T4R的單芯片MMIC,可級聯 |
| AM2752x | 支持2級聯 | AWR2188(8T8R) | 8T8R的單芯片MMIC,可級聯 |
| TDA4x | 支持4級聯 | ||
| TDA4x Plus | 支持4級聯 |
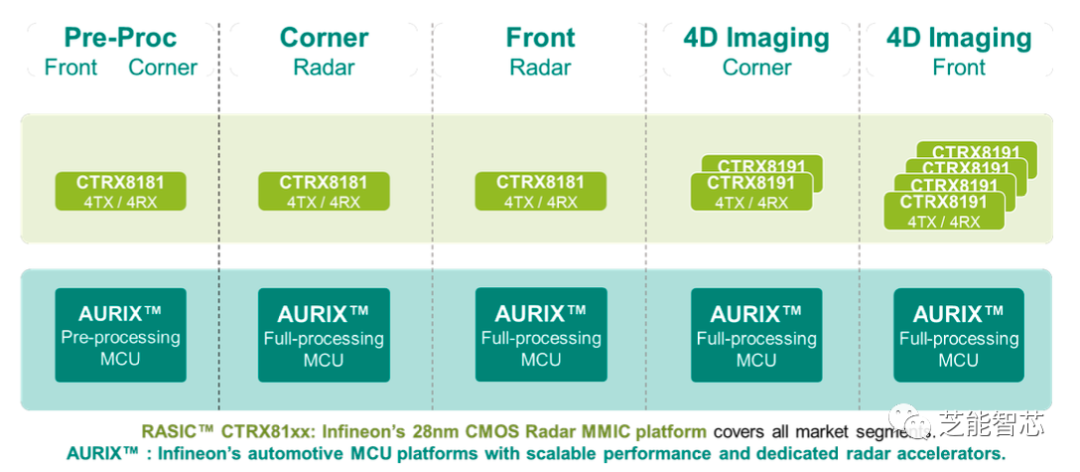
Infineon
| MCU | 說明 | MMIC | 說明 |
|---|---|---|---|
| TC39xA | 支持2級聯(6T8R) | CTRX8161(3T4R) | 3T4R的單芯片MMIC,可級聯 |
| TC45x | CTRX8181(4T4R) | 4T4R的單芯片MMIC,不能級聯 | |
| CTRX8191F(4T4R) | 8T8R的單芯片MMIC,可級聯 |
Ref:高性能與復雜級聯系統的77GHz毫米波雷達
趨勢小結
-
8T8R是一個趨勢;
-
增加4D雷達本身的算力是一個趨勢;
-
4級聯是一個趨勢;
-
2級聯對比傳統的3發4收可能的優缺點: 作用距離顯著增加,業內整體水平提高到接近300m(對小汽車); 提供了更好的水平角和俯仰角分辨率,方位角分辨率從3°提高到2°,俯仰角具備了3°的分辨率;
-
4級聯對比2級聯的6發8收可能的優缺點:提供了更好的水平角和俯仰角分辨率,方位角分辨率從2°提高到1°,俯仰角分辨率從3°提高到2.5°;作用距離提升到300m+;
3、新勢力4D雷達解決方案
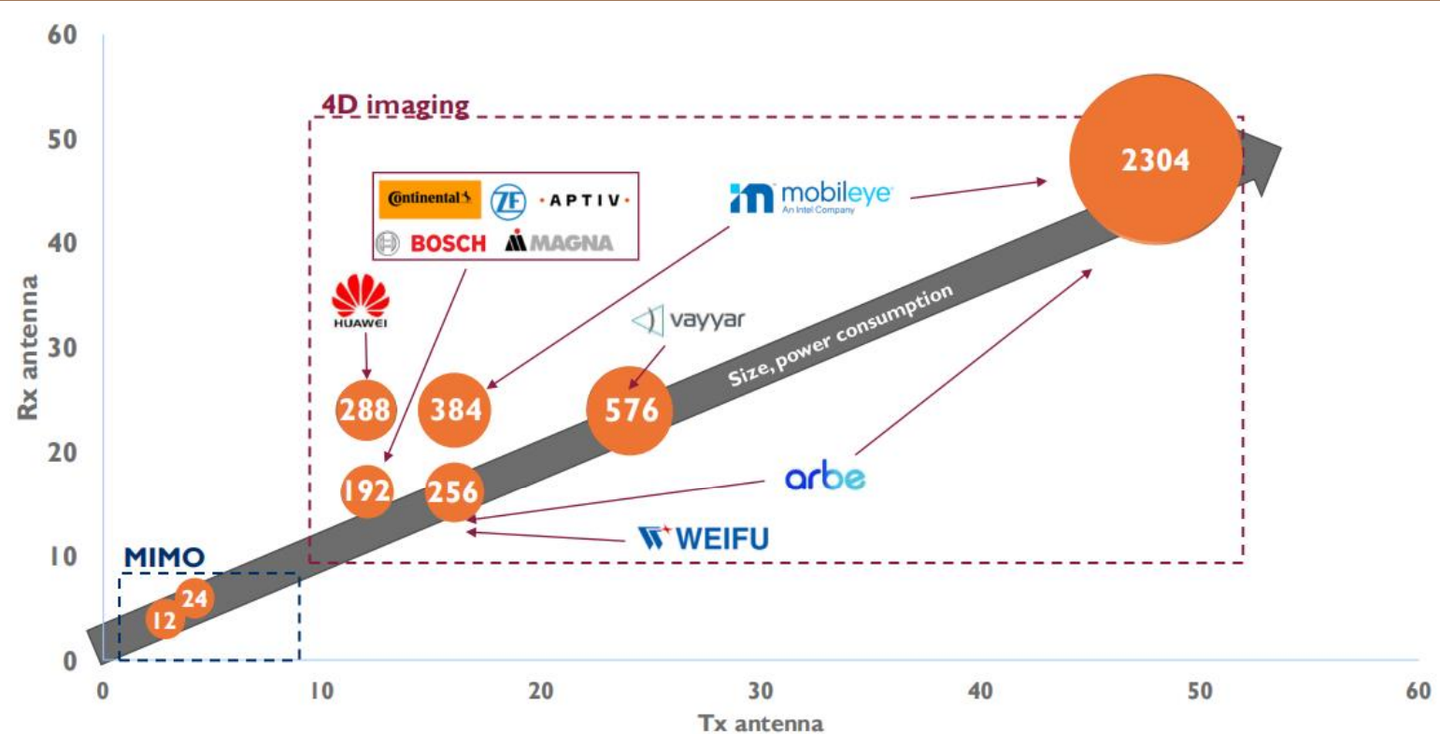
下圖是新勢力4D雷達解決方案匯總

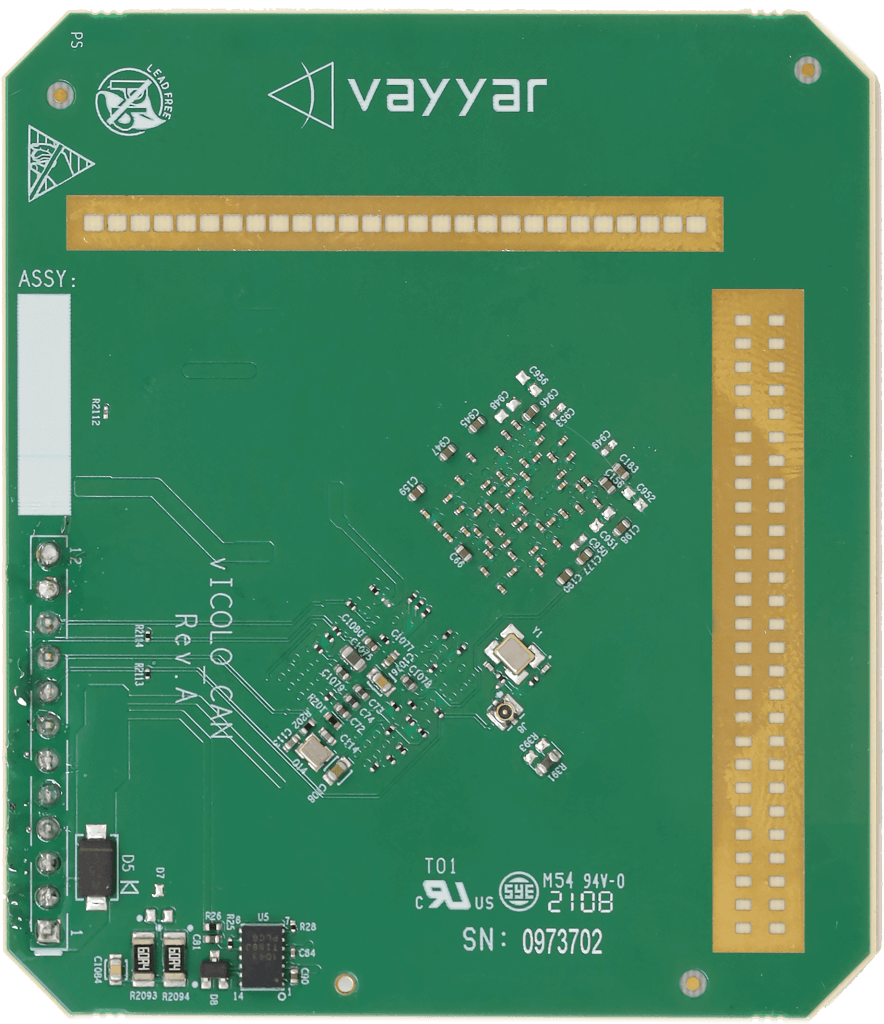
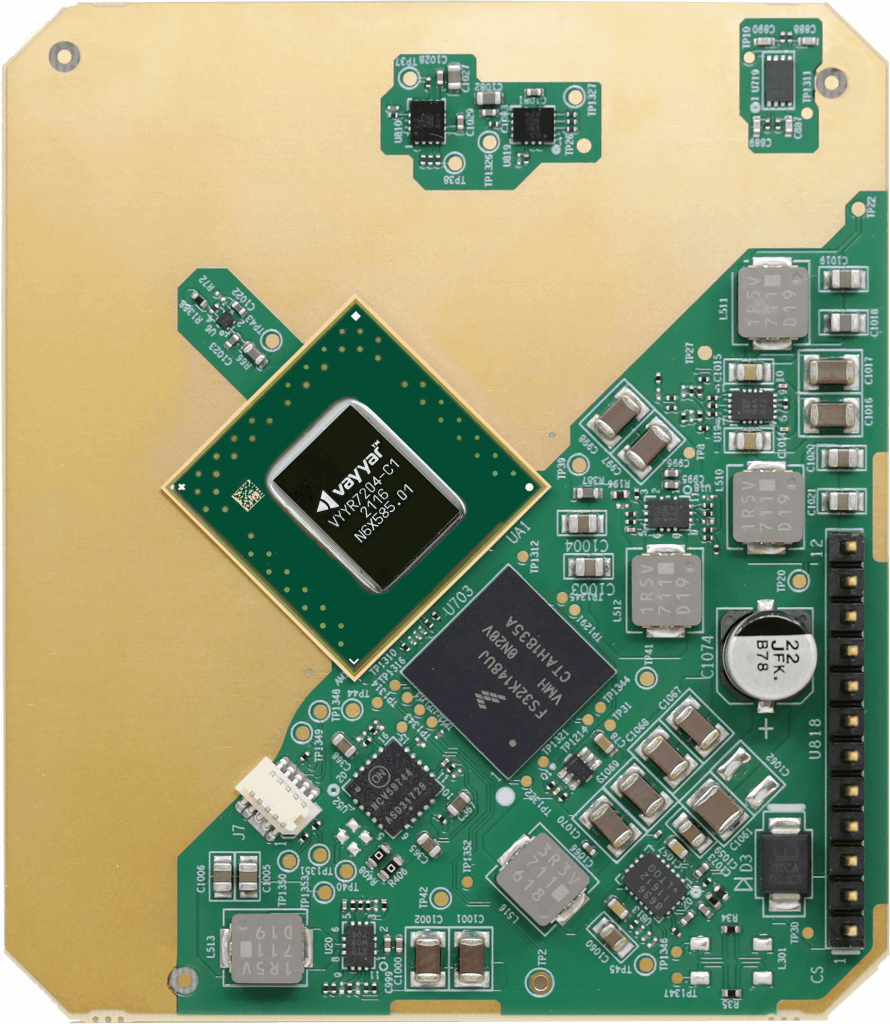
Vayyar
Vayyar成立于2011年,旨在通過“全方位”4D傳感器徹底改善車輛安全性和成本。利用其芯片上雷達(Radar-on-Chip,RoC)平臺,Vayyar創造了一個突破性的車輛安全解決方案,用一個芯片可以取代十幾個其他傳感器,且不需要昂貴的激光雷達和攝像頭。
這款高性能 4D 成像片上雷達 (RoC) 支持多達 48 個收發器(24T24R),可提供超越標準 79 GHz 汽車雷達解決方案的卓越分辨率。它提供無與倫比的方位角-仰角視場,帶來豐富的高度和深度感知,零最小距離和無盲區,即使在高速行駛下也能實現全面的實時監控。
注意:圖3中關于Vayyar的收發通道數有誤。
Ref:https://vayyar.com/auto/technology/79ghz/
Arbe
Arbe 芯片組的海量通道陣列使下一代雷達能夠將 L2+ 提升到更高的安全級別,以低功耗和低成本實現可靠的自主性。
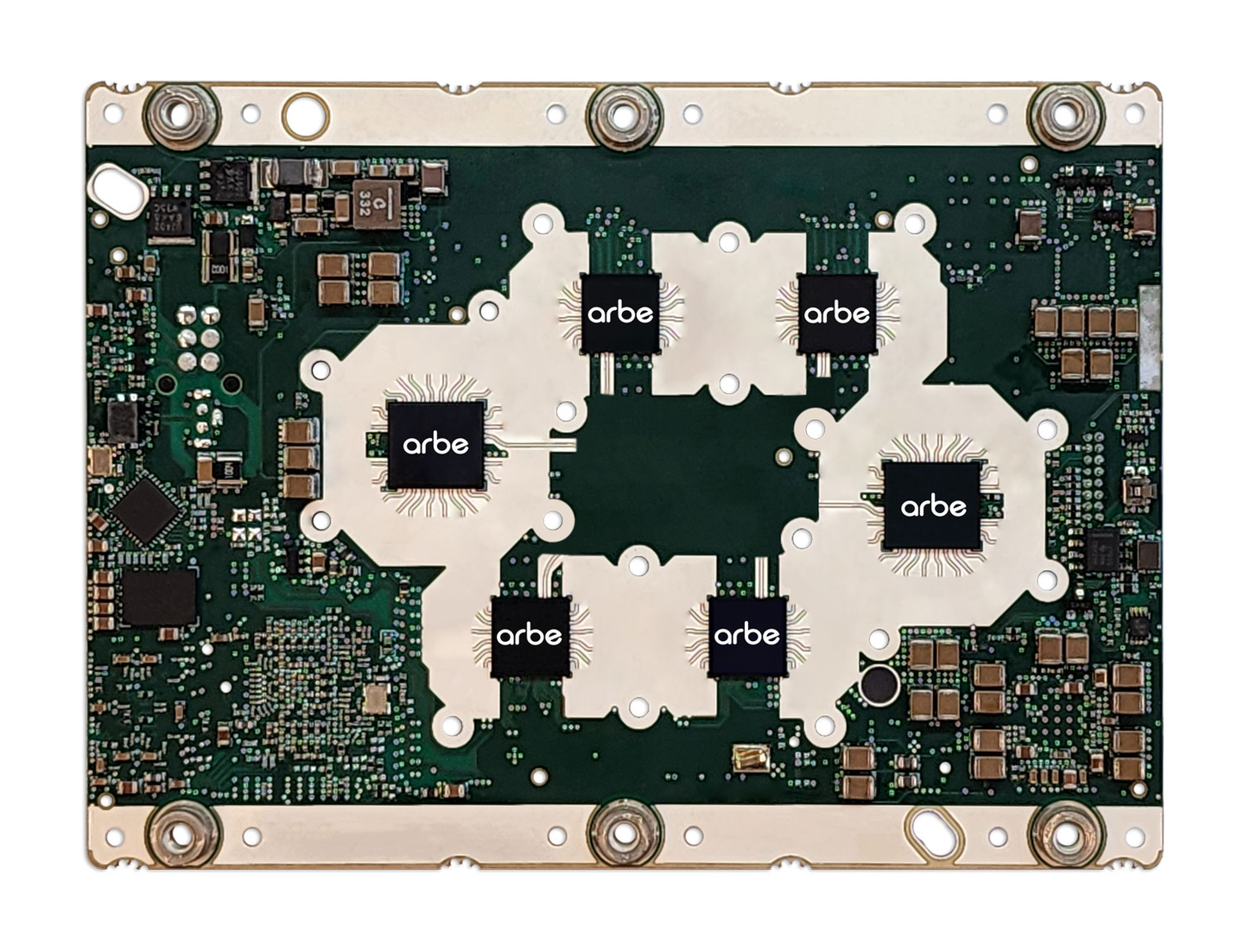
Arbe 的專利處理器芯片集成了雷達處理單元 (RPU) 架構和嵌入式雷達信號處理算法,可轉換海量原始數據,同時保持較低的硅片功耗。該汽車級片上系統 (SOC) 包括:安全處理器、安全模塊、雙核 DSP 和應用處理器。
-
處理來自 2,304 個虛擬通道的實時數據
-
以每秒 20 幀的速度提供 >10K 次檢測
-
3Tbps 等效處理吞吐量
-
包含 DSP 內核以適應 OEM 算法
-
點云和對象列表輸出
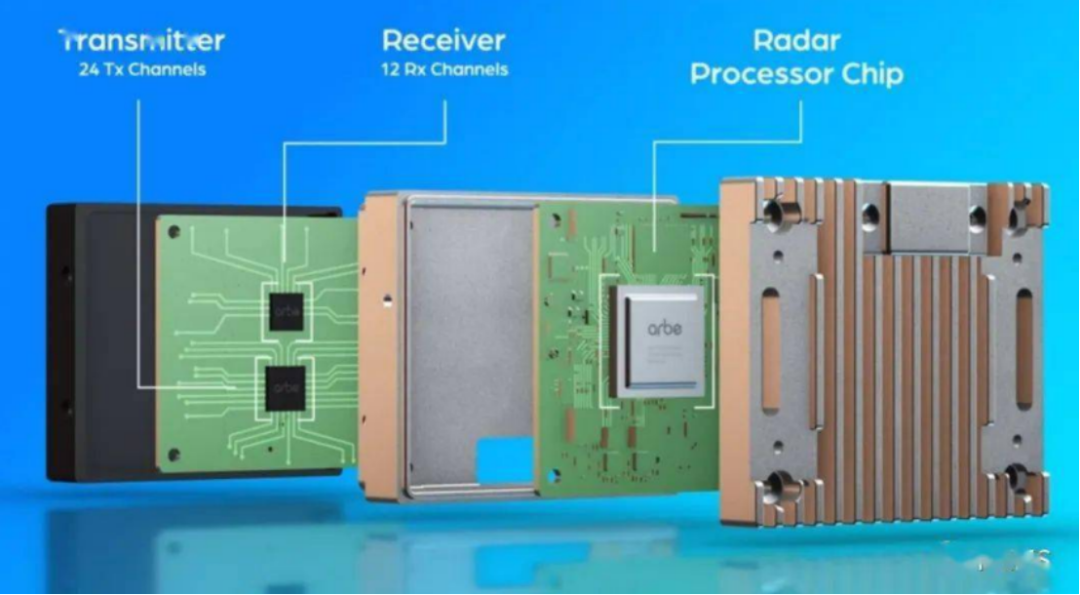
Arbe 專有的汽車級接收芯片采用最新的射頻處理技術,采用全新的 FDSOI CMOS 工藝 22FDX。該芯片專為支持 TD-MIMO 而設計,在靈敏度、通道隔離度和噪聲系數方面均擁有業內最佳的性能。Arbe 以市場上最低的單通道成本實現了最先進的毫米波接收性能。該接收芯片包含 12 個輸入通道,可用于 12 至 48 個接收通道的系統。
Arbe 專有的汽車級發射芯片采用最新的射頻處理技術,采用全新的 FDSOI CMOS 工藝 22FDX。該芯片專為支持 TD-MIMO 而設計,并擁有一流的輸出功率和功耗性能。Arbe 以市場上最低的單通道成本實現了最先進的毫米波發射性能。該發射芯片包含 24 個通道,可用于 24 至 48 個接收通道的系統,并支持 6 個通道并行進行波束賦形和轉向。
以下是兩款基于Arbe芯片組方案的雷達
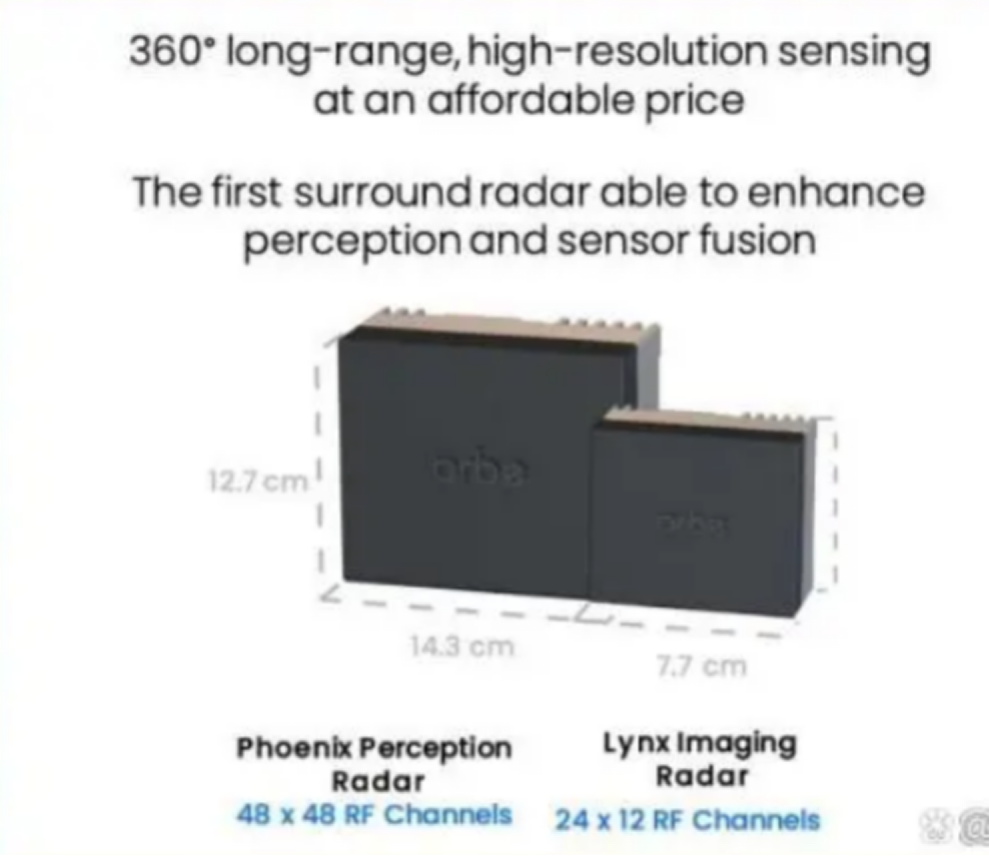

Ref:https://arberobotics.com/chipset/
Uhnder
Uhnder 的數字雷達具有一流的精度,能夠在全天候和光照條件下感知近距離和遠距離的移動或靜止物體(無論大小),同時還能減輕與其他雷達之間的相互干擾。

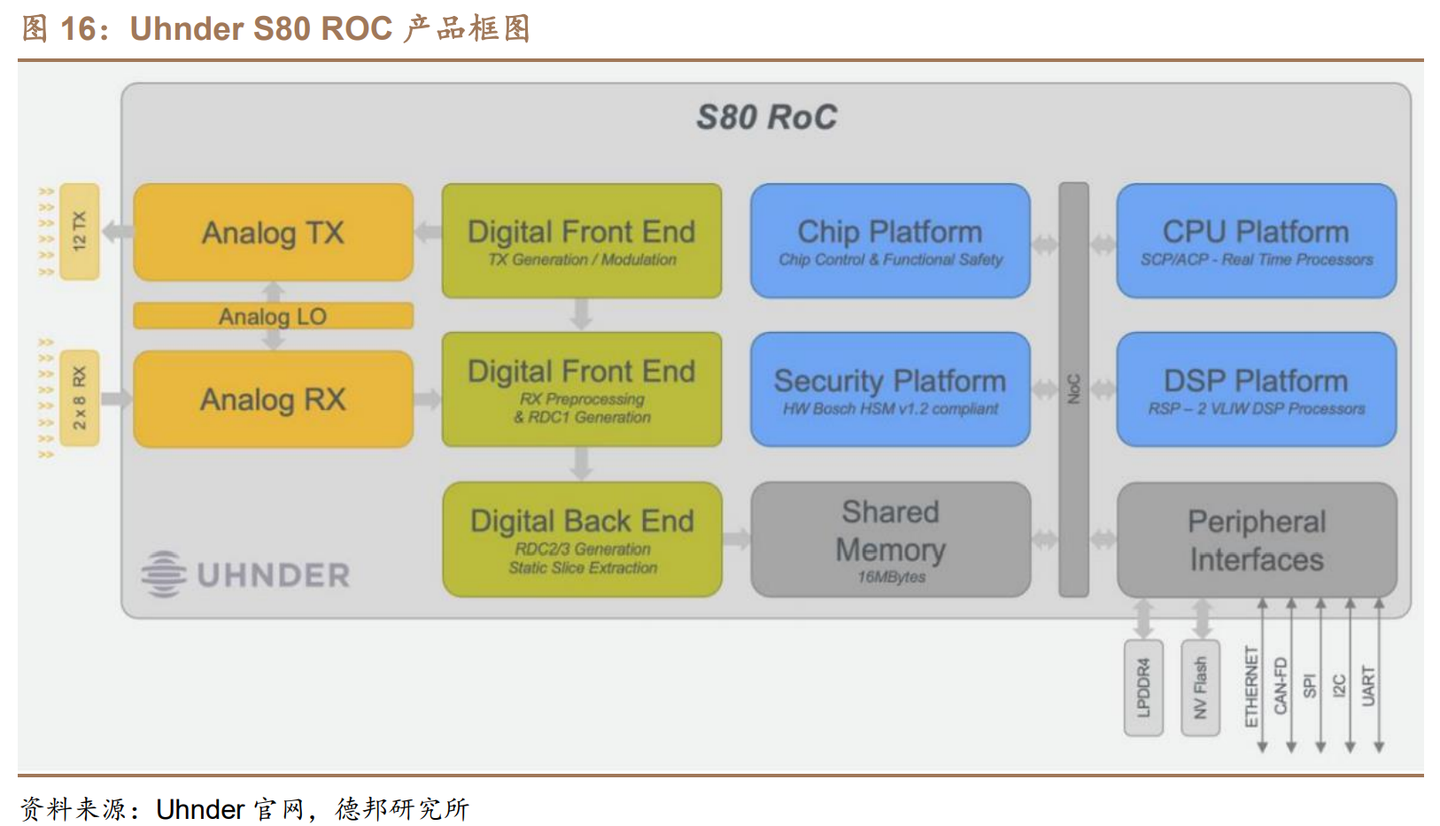
S81:Up to 96 Virtual Receive Channels (VRx) – True MIMO ? 8 Receive Antenna Channels (Rx) ? Up to 12 Transmit Antenna Channels (Tx)
S80:192 Virtual Receive Channels (VRx) ? 2x8 Receive Antenna Channels (Rx) ? 12 Transmit Antenna Channels (Tx) ? 96 VRx with True MIMO
Uhnder 的雷達芯片采用相位調制連續波 (PMCW),PMCW 的一個優點是,該架構不存在距離多普勒模糊。PMCW 雷達的距離響應類似于圖釘,這意味著可以同時實現高距離和多普勒分辨率。PMCW 的波形生成非常簡單:雙相調制的實現非常簡單。
Uhnder 的設計始于碼域中用于 MIMO 的無干擾代碼,例如用于通信的碼分多址 (CDMA)。這是一種強大的檢測方法,具有更高的角度分辨率,可以清晰地識別一定距離內靠近的兩個物體。他們使用 CDMA 代碼來調制 76 GHz 至 81 GHz 之間的載波。憑借這種數字代碼調制 (DCM) 技術,他們比 FMCW 具有多項優勢。其中一個優勢是,對于芯片的模擬部分,對于相同數量的通道,Uhnder 的面積比大多數競爭對手小 8 到 10 倍。另一個優勢是,由于它們是相干的并使用碼域分集,因此它們具有 12 個發射通道和 16 個接收通道,能夠獲得 192 個虛擬接收器 (VRX),此外,它們能夠對兩組天線進行時間復用,以實現方位角和仰角剖面的覆蓋。
它們的設計還能檢測來自多個其他雷達系統的干擾。CDMA 格式允許多個發射器/接收器相互不干擾。這一點尤其重要,因為進入 2022 年至 2024 年,將會有許多汽車配備雷達。PMCW 雷達的另一個關鍵優勢是它使用二進制序列,通過代碼/波形設計實現 TX 正交性。參考文獻 4 中的論文證明了這一優勢,該雷達采用 4×4 PMCW MIMO 雷達,可以檢測到雷達截面 (RCS) 分別為 5 和 20 dBm的兩個目標,距離相同(相同距離段),但角度不同,角度分辨率較高。
該雷達以兩種模式運行:MIMO 模式,在此模式下,它們向所有發射器發射不同的代碼,并且可以在所有接收器中同時接收這些代碼。由于 PMCW 使用二進制符號,因此 MIMO 雷達具有優勢,如果它們同時發射信號,則需要不同的 TX 天線上近乎完美的正交波形,這對于在駕駛場景中快速照亮物體是必需的。二進制無干擾代碼使正交性成為可能4。他們還可以在相控陣模式下操作芯片,在此模式下,它們對發射器進行數字相位調整,以便在發射器之間發送相同的代碼,從而實現相控陣和波束控制。
芯片上具有很高的可編程性,因為他們犧牲了模擬的簡單性,以增強處理能力,從而提高了靈活性。該公司聲稱這是首款軟件定義雷達。它擁有許多可在軟件中配置的功能,并且片上集成了一些非常強大的DSP,客戶可以根據需要進行編程,從而實現產品的差異化。這種靈活性從模擬開始,一直延伸到軟件。
Ref:https://www.uhnder.com/products/
Ref:https://www.ednasia.com/a-digital-mmw-radar-ic-for-automotive-use/
Mobileye
圖3中的Mobileye radar芯片有誤,是其Lidar芯片

從上圖可以看到,Mobileye用其雷達芯片組搭建了一個48T48R的雷達,并給出了相關指標參數。
Ref:Mobileye 真的不行了嗎?_文章_新出行
Ref:Mobileye’s imaging radar takes the wheel | Mobileye Blog
小結
48發48收 和 24發12收 對比4片級聯的12發16收可能的優缺點:更好的水平角和俯仰角角分辨率,48發48收能達到水平分辨率1.25°,俯仰分辨率1.7°;24發12收能達到水平分辨率2°,俯仰分辨率3°;Uhnder方案目前國內在做Uhnder方案的主要是歐菲光,實現12發16收
Ref:https://36kr.com/p/1916149583486985








)





(數據鏈路層、ARP、以太網、交換機))




