1、EtherCAT簡介
EtherCAT,這一基于以太網的現場總線系統,以其開放架構和高速性能著稱。CAT代表的是控制自動化技術(Control Automation Technology)的縮寫,彰顯了其在工業自動化領域的核心地位。作為確定性的工業以太網技術,EtherCAT由德國Beckhoff公司(倍福)率先研發,以其無需IP地址、高速傳輸(每個節點接收及傳送資料時間僅需1微秒以下)以及大數據處理能力受到廣泛贊譽。在Fanuc機器人中,EtherCAT板卡僅作為從站角色存在,通常與Beckhoff的PLC主站配合使用,共同構建高效穩定的通訊網絡。其最大輸入輸出字節數可達512字節,為復雜的數據交換提供了有力支持。本文將深入探討EtherCAT網絡通訊的配置方法,助力您更好地利用這一技術優勢。
2、配置前的準備
在著手配置EtherCAT網絡通訊之前,我們需要確保已經完成了以下準備工作:首先,確認網絡中所有設備的硬件連接已經正確完成,且設備狀態良好;其次,熟悉并了解EtherCAT的通訊協議及數據交換標準;最后,準備好相應的配置工具和軟件,以便于進行后續的配置操作。通過這些充分的準備,我們將能夠更加順利地開展EtherCAT網絡通訊的配置工作。
2.1 確保硬件連接無誤
在開始配置EtherCAT網絡通訊之前,首要任務是驗證網絡中所有設備的硬件連接是否已經正確且穩固地建立。這包括檢查網線、交換機、路由器以及EtherCAT從站設備等的連接情況,確保它們的狀態良好,能夠正常進行數據傳輸。通過這一步驟的準備,我們可以為后續的配置操作奠定堅實的基礎。
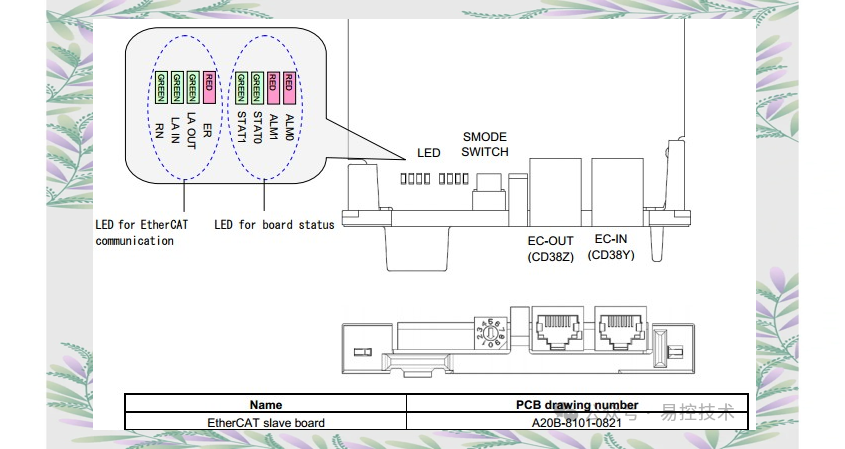
機器人配置:采用EtherCAT Slave Board(編號A20B-8101-0821)進行連接,通過帶屏蔽的網線將板卡與PLC的網口相連,確保網絡接口EC-IN(CD38Y)正確無誤。
2.2 軟件配置在開始使用EtherCAT Slave Board之前,需要確保已經準備好了相應的軟件。這包括安裝必要的驅動程序和配置工具,以確保板卡與PLC之間的順暢通信。同時,還需要熟悉相關的軟件界面和操作流程,以便能夠高效地利用板卡的功能。
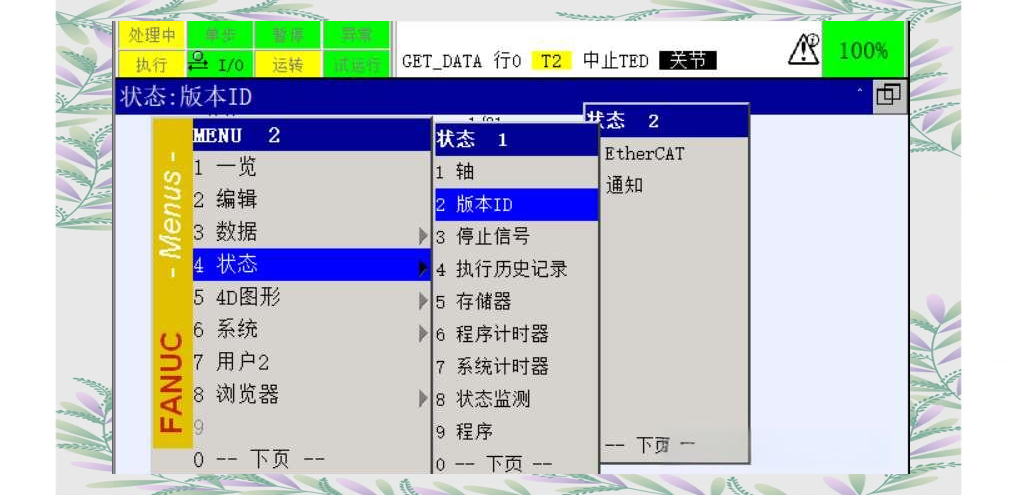
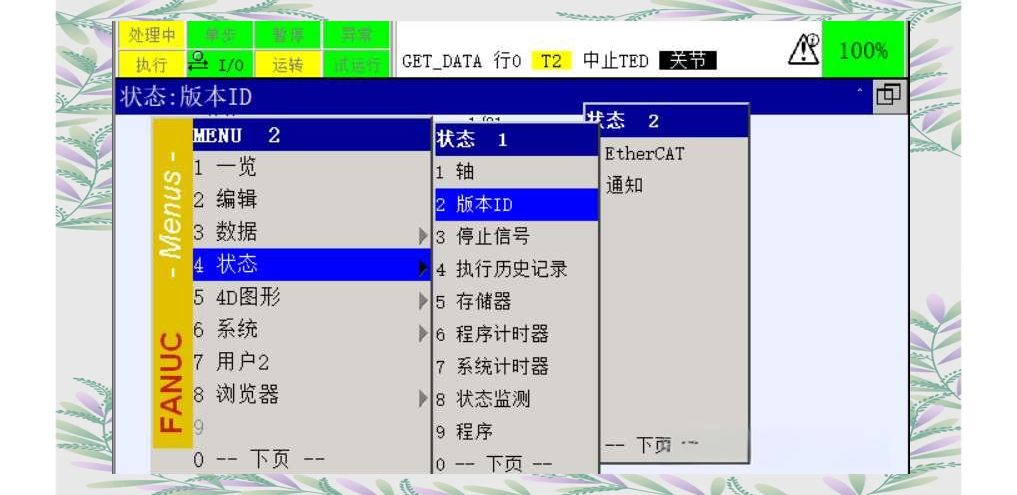
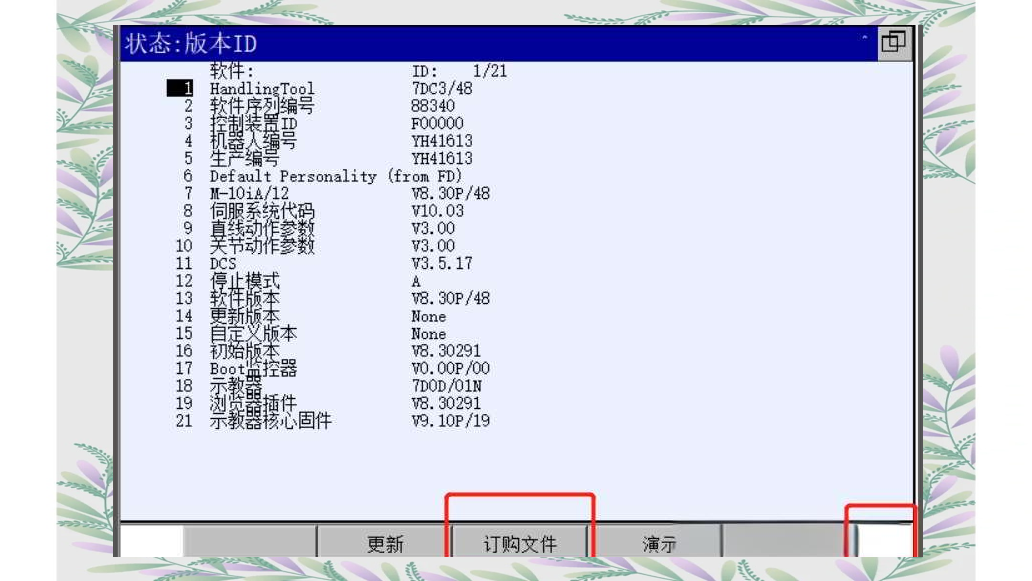
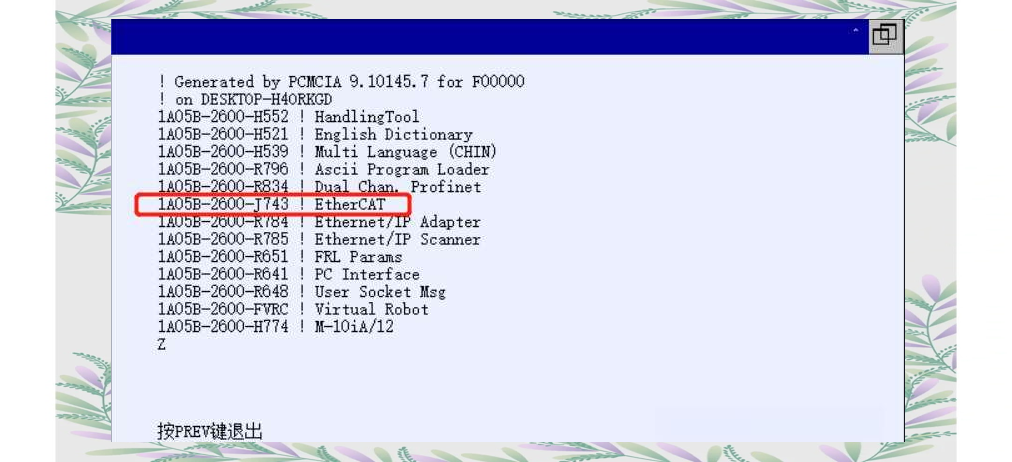
使用EtherCAT通訊方式時,機器人系統需滿足一定版本要求。對于7DC2/11版本以上的系統,可直接使用;而若是Mate柜,則需確保系統版本至少為7DC3。在MENU菜單中,依次選擇下一頁、版本ID、NEXT和訂購文件,即可找到相關軟件編號。若系統中未包含此選項,需進行功能添加操作,具體方法可咨詢后臺或通過回復“發那科刷機”了解更多詳情。
2.3 關于通訊ESI文件
在EtherCAT通訊方式下,機器人系統不僅需要滿足版本要求,還需要正確處理通訊ESI文件。這些文件是機器人系統通訊的關鍵組成部分,負責在各個設備之間傳遞數據和指令。確保ESI文件的正確性和完整性,對于保障機器人系統的穩定通訊至關重要。
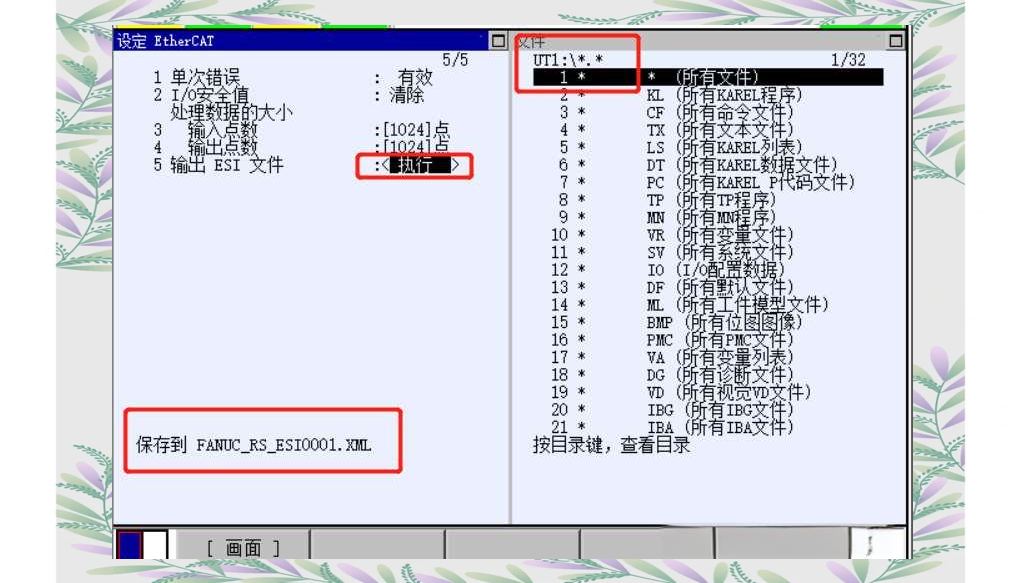
需向PLC工程師提供機器人EtherCAT通訊的ESI文件。此文件可在機器人EtherCAT配置界面的“輸出ESI文件”選項中導出,其導出路徑位于menu-file目錄下,且導出的文件名默認為FANUC_RS_ESI0001.xml。
具體操作步驟如下:在EtherCAT配置界面中,將光標移至第五項“輸出ESI文件:執行”上,并按下ENTER鍵。此時,ESI文件將被成功導出,并在屏幕下方顯示“保存到FANUC_RS_ESI0001.XML”的提示。隨后,可在指定的導出位置,例如U盤,找到該ESI文件。
3、EtherCAT配置詳解
3.1 深入了解EtherCAT配置界面
在機器人EtherCAT通訊中,配置環節至關重要。本文將帶您逐步探索EtherCAT的配置界面,了解其各項功能與操作。通過深入剖析,您將能更熟練地運用EtherCAT,實現機器人通訊的高效配置。
- 進入配置界面:首先,在菜單中選擇“設置”,然后進入“EtherCAT”選項,以此開啟EtherCAT的配置之旅。
- 設定通訊參數:根據實際的通訊需求,您需要仔細設定輸入點數和輸出點數,以確保通訊的順暢與準確。
- 冷啟動機器人:在每次更改了EtherCAT配置界面的參數后,務必進行機器人的冷啟動,以使新的配置能夠生效并應用于實際通訊中。
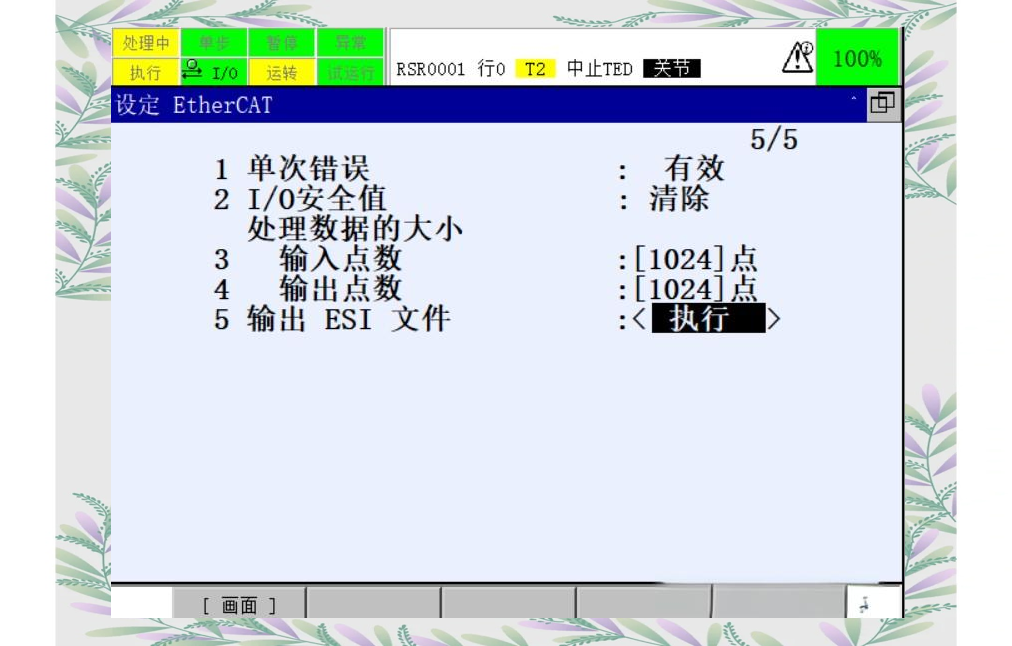
接下來,我們將詳細解釋界面上的各項設置。
在EtherCAT配置過程中,若出現單次通訊錯誤,通常在正常通訊后需將“單次錯誤”設置為“無效”。但在配置EtherCAT之前,若需移動機器人,則可以將此項設置為“有效”,以清除“PRIO-801 EtherCAT 脫機”的報警。
此外,還需注意“I/O 安全值”的默認設置,通常為清除狀態。
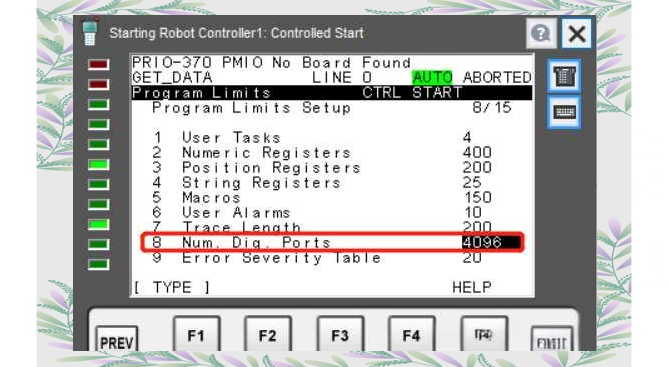
關于輸入點數和輸出點數的選擇,可以通過點F4[選擇]在128、256、512、1024、2048、4096這些選項中進行設定。當選擇超過512的數值時,可以在控制啟動—menu—下一頁—程序設置中進一步調整最大DIDO數量。
最后,若需導出xml配置文件,可以選擇“輸出ESI文件”,并將其保存到menu—文件目錄中。
3.2 關鍵變量解釋
$ECAT.ASGUOP 默認值為1,代表自動將UOP分配給EtherCAT網絡;若設為0,則表示不進行UOP的自動分配。
3.3 信號分配
在機架號為106,插槽號固定為1的情況下,我們可以查看以下的信號分配示例:
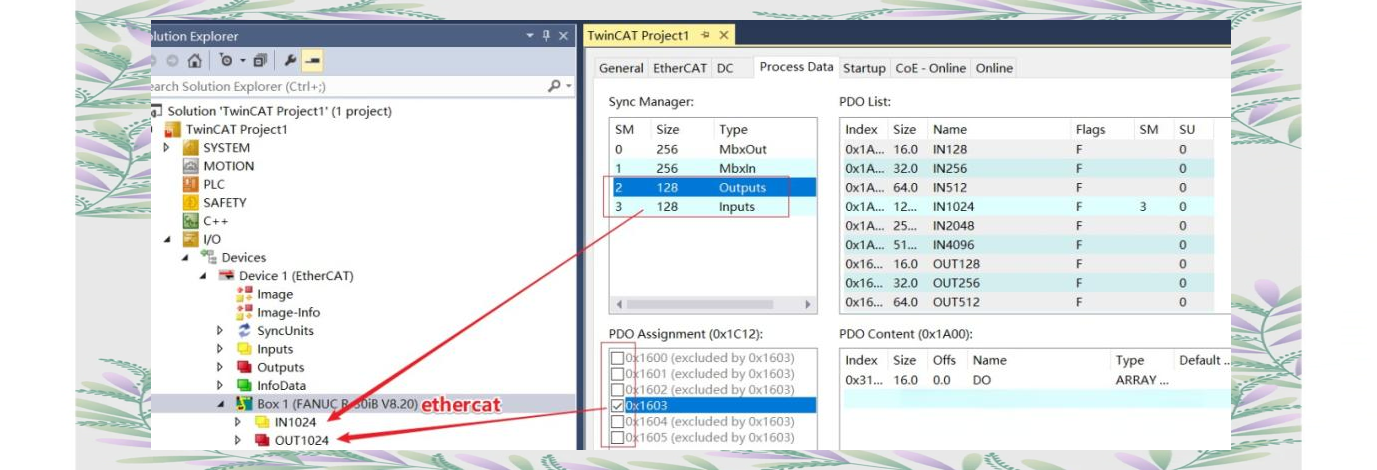
4、PLC側配置示例
以Beckhoff PLC為例,加載上文導出的FANUC_RS_ESI0001.xml文檔后,可以在PDO Assignment中修改輸入輸出變量的字節大小,支持16/32/64/128/256/512 Bytes的靈活配置。
5、常見報警及其應對措施
報警信息:PRIO-801,EtherCAT脫機
應對措施:檢查EtherCAT設置或網線連接是否正常。


![[1Prompt1Story] 滑動窗口機制 | 圖像生成管線 | VAE變分自編碼器 | UNet去噪神經網絡](http://pic.xiahunao.cn/[1Prompt1Story] 滑動窗口機制 | 圖像生成管線 | VAE變分自編碼器 | UNet去噪神經網絡)














)

