此練習主要是:關于滯后補償器。
①滯后補償器作用;
②不同滯后補償器的效果;
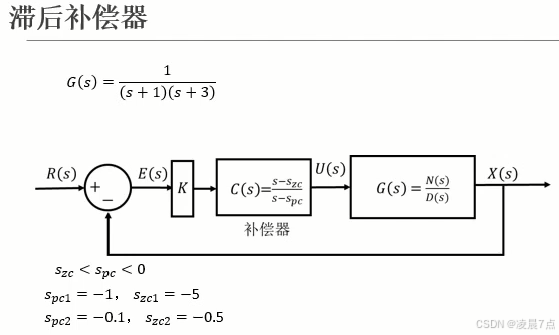
一、為什么使用滯后補償器
- 滯后補償器:主要用于改善系統的穩態誤差;
- 滯后補償器設計思路:同時為系統增加一個極點和零點,與超前補償器不同的是,滯后補償器的極點的位置比零點更加靠近虛軸;
- 選取兩組不同滯后補償器,如圖所示;
- 因為,兩組滯后補償器,零點極點的比值是一致的,所以改善穩態誤差的效果是一致的;但是,由于位置很不同,所以對系統的瞬態響應有很大影響。
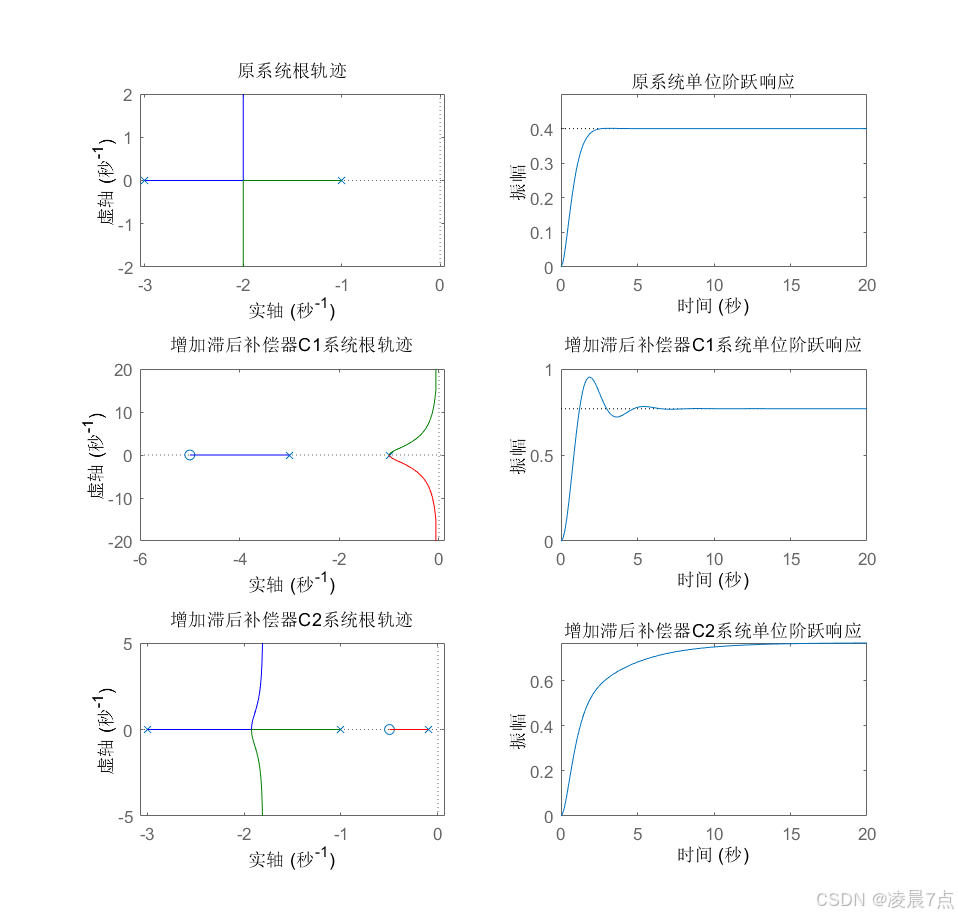
- 在matlab中,繪制對應的根軌跡,以及閉環系統的單位階躍響應。
- 代碼如下:
clc;clear;close all;
%% 定義G(s)
s = tf('s');
G_s = 1/((s+1)*(s+3));
K = 2;
t = 0:0.1:20;
%% 繪制原傳遞函數根軌跡及其響應
subplot(3,2,1);
rlocus(G_s);
title('原系統根軌跡');
subplot(3,2,2);
sys_1 = feedback(K*G_s, 1);
step (sys_1,t);
title('原系統單位階躍響應');%%%% 定義補償器C1(s)
sz = -5;
sp = -1;
C1_s = (s-sz)/(s-sp);
%% 使用補償器C1(s)后的根軌跡及其響應
subplot(3,2,3);
rlocus(G_s*C1_s);
title('增加滯后補償器C1系統根軌跡');
subplot(3,2,4);
sys_2 = feedback(K*G_s*C1_s, 1);
step (sys_2,t);
title('增加滯后補償器C1系統單位階躍響應');%%%% 定義補償器C2(s)
sz = -0.5;
sp = -0.1;
C2_s = (s-sz)/(s-sp);
%% 使用補償器C1(s)后的根軌跡及其響應
subplot(3,2,5);
rlocus(G_s*C2_s);
title('增加滯后補償器C2系統根軌跡');
subplot(3,2,6);
sys_3 = feedback(K*G_s*C2_s, 1);
step (sys_3,t);
title('增加滯后補償器C2系統單位階躍響應');
二、運行結果及分析
1、從原系統圖:
- 原系統單位階躍響應,最終將系統穩定在0.4左右,所以穩態誤差是1-0.4=0.6;
2、增加補償器C1系統圖:sz=-5;sp=-1;
- 增加C1補償器系統單位階躍響應,最終將系統穩定在0.8左右,所以穩態誤差是1-0.8=0.2;
- 當增加C1:sz=-5;sp=-1;此時完全改變了原因系統的根軌跡方向,因此,此時的單位階躍響應就會與原系統很不同;
3、增加補償器C2系統圖:sz=-0.5;sp=-0.1;
- 增加C2補償器系統單位階躍響應,最終將系統穩定在0.8左右,所以穩態誤差是1-0.8=0.2;
- 當增加C2:sz=-0.5;sp=-0.1;此時只是增加了一條由x=-0.1指向x=-0.5的根軌跡,對原來根軌跡影響比較小,當前根軌跡還很一致,只是增加一條距離虛軸很近的根軌跡,因此,此時的單位階躍響應就會與原系統比較類似;
4、總體來看
-
發現,增加C1和C2滯后補償器,最后的曲線截然不同。
-
當增加C1滯后補償器,就完全不同了,sz=-5;sp=-1;這對零極點就完全改變原有根軌跡的形態了,所以響應也就完全不同。
-
當增加C2滯后補償器,可以看出,從0上升到0.4的過程,幾乎和原系統一致,只是從0.4之后,再通過sz=-0.5;sp=-0.1;這對零極點來修正穩態誤差。
學習來源:《控制之美》[卷1],王天威


、基本功能、數據結構內容、單向鏈表(概念、對象、應用))









實現)
)

)
React +Ts(vite創建項目/useState/Props/Interface))

解釋)
