- MATLAB
- 在 Simulink 里做以下設置
- MATLAB 腳本調用示例
- python 實現
- 離散 PID 實現(并行形式)
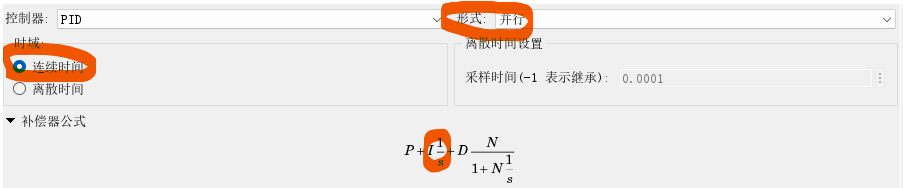
- Simulink 中兩種 PID 結構(并聯形式, I-形式)下連續/離散時域里積分增益 I 的表示
- 并聯(Parallel) vs 理想(I-Form),use I*Ts 的勾選
- 什么時候用連續域 vs 離散域?
MATLAB
首先,MATLAB simulink 的 PID 長這樣:

其中,PID 控制器以 1e-4 的步長運行,而物理模型用固定步長 1e-5 的求解器來集成。
這樣,每仿真一次 StopTime = 1e-4,就得到了“10 步模型響應 + 1 次 PID 更新”之后的 Z Z Z 和 V _ I C 1 V\_IC1 V_IC1,非常符合“每個控制電壓需要響應 10 次”的需求。
在 Simulink 里做以下設置
-
Solver
- 打開 Model Settings (Ctrl+E) → Solver
- Type 選 Fixed-step
- Solver 選 ode4 (Runge–Kutta)(或者其他固定步長求解器)
- Fixed-step size 填
1e-5
-
PID Controller
- 雙擊 PID 塊(或 PID Controller),在 Discrete 模式下
- Sample time (Ts) 填
1e-4
-
Rate Transition(可選,但推薦)
- 在 PID 輸出和物理模型輸入之間加一個 Rate Transition 塊,保證兩條不同速率信號安全切換。
- 默 1e-4 → 1e-5,不用改參數,Simulink 會自動用最近鄰保持。
-
Initial Condition
- 把物理模型里初始化狀態的那一支“Initial Condition”塊的初值寫成變量
x0(工作區定義)。
- 把物理模型里初始化狀態的那一支“Initial Condition”塊的初值寫成變量
-
To Workspace
- 用 To Workspace 塊把
outZ(物理模型的 Z)和outV_IC1(PID 輸出)導出。
- 用 To Workspace 塊把
MATLAB 腳本調用示例
%%—— 預先在 base workspace 定義好初始狀態和參考值 ——%%
x0 = [...]; % 初始狀態向量
Z_reference = 0; % 參考值恒為 0assignin('base','x0',x0);
assignin('base','Z_reference',Z_reference);%%—— 設置仿真——%%
Ts_ctrl = 1e-4; % 控制器采樣周期
Ts_solver = 1e-5; % 求解器步長mdl = 'PID';
open_system(mdl);% 1) 全局求解器
set_param(mdl, ...'Solver', 'ode4', ... % 固定步長 RK4'FixedStep', num2str(Ts_solver), ...'StopTime', num2str(Ts_ctrl) % 仿真到一個控制步
);% 2) PID 塊采樣時間
set_param([mdl '/PID Controller'], ...'SampleTime', num2str(Ts_ctrl) ...
);%%—— 運行仿真 ——%%
simOut = sim(mdl, ...'SrcWorkspace','base', ...'SaveOutput','on', ...'ReturnWorkspaceOutputs','on');%%—— 提取最后一步 ——%%
Z_all = simOut.get('outZ'); % time series
V_IC1_all = simOut.get('outV_IC1');Z = Z_all(end);
V_IC1 = V_IC1_all(end);fprintf('t=%.0e 時刻: Z = %.6f, V_IC1 = %.6f\n', Ts_ctrl, Z, V_IC1);
python 實現
對于相同的求解器初始值,如果 MATLAB PID 和 python PID 的 第一步輸出相差一個數量級,最常見的坑就是:

MATLAB PID 塊的參數含義可能和你認為的不一樣(詳見下文 Simulink 中兩種 PID 結構中 I 增益的表示)
- Simulink 默認的 PID 塊有好幾種形式(Parallel / I-form / P-only …),比如,連續時域中 它的 “I 增益” 在 Parallel 形式下 表示的是 K i s \frac{K_i}{s} sKi??。如果直接把塊里的 “I 增益” 當成 Python 里的 K i K_i Ki?,就會差好幾倍。
- 檢查:雙擊 Simulink PID 塊,看它 是連續時間還是離散時間,是 Parallel 形式還是 I-form,然后 把參數轉換成 Python 里的 ( K p , K i , K d , N ) (K_p,\,K_i,\,K_d,\,N) (Kp?,Ki?,Kd?,N) 平行形式。
對號入座,才能在 Python 里準確還原 MATLAB/Simulink 的 PID 積分行為。
離散 PID 實現(并行形式)
Simulink 的離散 PID Controller 塊并不是把連續‐時間的
u ( t ) = ? ( K p e + K i ? ∫ e d t + K d e ˙ ) u(t)=-\bigl(K_p e + K_i\!\int e\,dt + K_d\dot e\bigr) u(t)=?(Kp?e+Ki?∫edt+Kd?e˙)
簡單地用歐拉積分+一階濾波來近似。它用的是一整套 “ z z z 域” 差分方程:
C ( z ) = P + I T s 1 z ? 1 + D N 1 + N T s z ? 1 z C(z)\;=\;P \;+\; I\,T_s\frac{1}{z-1} \;+\; D\,\frac{N}{1+N\,T_s}\,\frac{z-1}{z} C(z)=P+ITs?z?11?+D1+NTs?N?zz?1?
-
積分項
u I [ k ] = u I [ k ? 1 ] + I T s e [ k ] u_I[k]=u_I[k-1]+I\,T_s\;e[k] uI?[k]=uI?[k?1]+ITs?e[k]
-
微分項(帶濾波)
令 N d = N T s N_d=N\,T_s Nd?=NTs?,有y D [ k ] = 1 1 + N d y D [ k ? 1 ] + K d N d 1 + N d ( e [ k ] ? e [ k ? 1 ] ) y_D[k] =\frac{1}{1+N_d}\,y_D[k-1] \;+\;\frac{K_d\,N_d}{1+N_d}\bigl(e[k]-e[k-1]\bigr) yD?[k]=1+Nd?1?yD?[k?1]+1+Nd?Kd?Nd??(e[k]?e[k?1])
-
總輸出
u [ k ] = K p e [ k ] + u I [ k ] + y D [ k ] u[k] = K_p\,e[k] + u_I[k] + y_D[k] u[k]=Kp?e[k]+uI?[k]+yD?[k]
而如果在 Python 里用的是連續時間那套,
new_integral = integral + e*dt
derivative = (N*dt*raw_derivative + prev_filtered)/(1+N*dt)
u = Kp*e + Ki*integral + Kd*derivative
它們并不等價。
下面這段代碼給出了一個跟 Simulink 離散 PID Controller 塊 一模一樣的差分實現。它對應于塊上方顯示的 并行形式,
C ( z ) = P + I T s 1 z ? 1 + D N 1 + N T s z ? 1 z , C(z)=P \;+\; I\,T_s\frac{1}{z-1} \;+\; D\frac{N}{1+N\,T_s}\frac{z-1}{z}, C(z)=P+ITs?z?11?+D1+NTs?N?zz?1?,
其中 “積分(I)”框里顯示的就是 I T s I\,T_s ITs?(注意勾選),所以在代碼里直接用它來做積分增量。積分輸出 和 最終的控制量 都被 鉗位在 [ ? V l i m , V l i m ] [-V_{\rm lim},\,V_{\rm lim}] [?Vlim?,Vlim?] 以內。
P P P 項沒有啥好說的,首先根據上面說的實現 I I I 項,
# 內部狀態
self.uI = 0.0 # 上一步積分項 u_I[k-1]
self.yD = 0.0 # 上一步濾波微分 y_D[k-1]
self.e_prev = 0.0 # 上一次誤差 e[k-1]
# 積分項(差分形式)
uI_candidate = self.uI_prev + self.Ki * error # use I*Ts in simulink
# Anti-windup: limit integral term 將 integral 限在 [-V_lim, +V_lim]
uI_candidate = torch.clamp(uI_candidate, -self.V_lim, self.V_lim)
注意,在 Simulink 離散 PID Controller 塊中,積分項的更新總是滯后一拍,它遵循“先用上一步(或初始)的狀態算輸出,再更新狀態” 的時序。
可以在 MATLAB 中只打開 I 控制器實驗,會發現第一步的控制器輸出為 0。
- 初始時刻 t = 0 t=0 t=0 的輸出
- 塊會先把“初始積累值” u I [ 0 ] u_I[0] uI?[0](默認由 Integrator Initial Condition 參數決定,缺省為 0)和“初始濾波值” y D [ 0 ] y_D[0] yD?[0](同樣缺省為 0)帶入控制律中。
- 此時即便誤差 e [ 0 ] ≠ 0 e[0]\neq0 e[0]=0,積分項 還沒有 加上 K i T s ? e [ 0 ] \,K_iT_s\cdot e[0] Ki?Ts??e[0] 的那部分增量,因此積分輸出項是 0;
- 在第一個采樣周期結束( t = T s t=T_s t=Ts?)時
- Simulink 才會用 e [ 0 ] e[0] e[0] 來更新積分器:
u I [ 1 ] = u I [ 0 ] + ( K i T s ) e [ 0 ] , u_I[1] = u_I[0] + (K_iT_s)\,e[0], uI?[1]=uI?[0]+(Ki?Ts?)e[0],
并在此刻把新的 u I [ 1 ] u_I[1] uI?[1] 參與下一次輸出計算。

把 forward() 實現改成這樣,就能和 Simulink 保持一致:
# 先用 P項、舊濾波、微分項 計算輸出
u_unsat = self.Kp*e + self.uI_prev + self.yD# 再更新積分狀態,為下一步準備
uI_candidate = self.uI_prev + self.Ki * error # use I*Ts in simulink
接下來是微分項 D D D 的實現,

# 更新 D 項 —— 前向歐拉離散濾波, 差分方程來源于: yD[k] = yD[k-1] + Ts*( Kd*N*(e[k]-e[k-1])/Ts - N*yD[k-1] )
raw_deriv = (error - self.e_prev) / self.dt
self.yD = self.yD_prev + self.dt * ( self.Kd * self.N * raw_deriv - self.N * self.yD_prev )
Simulink 中兩種 PID 結構(并聯形式, I-形式)下連續/離散時域里積分增益 I 的表示
先把幾個概念理清:
-
連續域的 s s s(拉普拉斯算子)
-
把時間域信號 f ( t ) f(t) f(t) 變換到復頻域后,微分 d d t \tfrac{d}{dt} dtd? 對應乘以 s s s:
L { x ˙ ( t ) } = s X ( s ) . \mathcal{L}\{\,\dot x(t)\} = s X(s). L{x˙(t)}=sX(s).
-
因此, K i s \dfrac{K_i}{s} sKi?? 就是“對誤差做積分”—— K i K_i Ki? 是積分增益,單位大致是“控制量/(誤差×秒)”。
-
-
離散域的 1 z ? 1 \tfrac{1}{z-1} z?11?(差分算子)
-
把時間序列 x [ k ] x[k] x[k] 做 z z z 變換后,
Z { x [ k ] ? x [ k ? 1 ] } = ( 1 ? z ? 1 ) X ( z ) ? Z { ∑ i = 0 k x [ i ] } = 1 1 ? z ? 1 X ( z ) = z ? 1 1 ? z ? 1 X ( z ) . \mathcal{Z}\{\,x[k]-x[k-1]\} = (1 - z^{-1})X(z) \quad\Longrightarrow\quad \mathcal{Z}\Bigl\{\sum_{i=0}^k x[i]\Bigr\} = \frac{1}{1-z^{-1}}X(z) = \frac{z^{-1}}{1-z^{-1}}\,X(z)\,. Z{x[k]?x[k?1]}=(1?z?1)X(z)?Z{i=0∑k?x[i]}=1?z?11?X(z)=1?z?1z?1?X(z).
-
換一種常見寫法 1 z ? 1 = ? z ? 1 1 ? z ? 1 \tfrac{1}{z-1} = -\tfrac{z^{-1}}{1-z^{-1}} z?11?=?1?z?1z?1?,它就對應“累加求和”那一塊。離散積分項一般寫成
K i T s 1 z ? 1 ? u I [ k ] = u I [ k ? 1 ] + K i T s e [ k ] . K_i\,T_s\;\frac{1}{z-1} \quad\Longleftrightarrow\quad u_I[k] = u_I[k-1] + K_i\,T_s\,e[k]. Ki?Ts?z?11??uI?[k]=uI?[k?1]+Ki?Ts?e[k].
-
這里 T s T_s Ts? 是采樣周期,把每步的積分增益拉成了和連續域里 K i / s K_i/s Ki?/s 數值等價的 “每步累加” 形式。
-
并聯(Parallel) vs 理想(I-Form),use I*Ts 的勾選
| 特性 | 并聯(Parallel)形式 | I-Form(Ideal)形式 |
|---|---|---|
| 連續時域公式 | C ( s ) = K p + K i s + K d N 1 + N 1 s C(s)=K_p + \dfrac{K_i}{s} + K_d\,\frac{N}{1+N \frac{1}{s}} C(s)=Kp?+sKi??+Kd?1+Ns1?N? | C ( s ) = K p + K p T i 1 s + K p K d N 1 + N 1 s C(s)=K_p + \dfrac{K_p}{T_i}\,\dfrac{1}{s} + K_p K_d \frac{N}{1+N \frac{1}{s}} C(s)=Kp?+Ti?Kp??s1?+Kp?Kd?1+Ns1?N? |
| 離散時域公式 | C ( z ) = K p + K i T s 1 z ? 1 + K d N 1 + N T s 1 z ? 1 C(z)=K_p + K_i T_s \dfrac{1}{z-1} + K_d \frac{N}{1 + N T_s\frac{1}{z-1}} C(z)=Kp?+Ki?Ts?z?11?+Kd?1+NTs?z?11?N? | C ( z ) = K p + K p T s T i 1 z ? 1 + K p K d N 1 + N T s 1 z ? 1 C(z)=K_p + \dfrac{K_p T_s}{T_i}\,\dfrac{1}{z-1} + K_p K_d \frac{N}{1 + N T_s\frac{1}{z-1}} C(z)=Kp?+Ti?Kp?Ts??z?11?+Kp?Kd?1+NTs?z?11?N? |
| 離散時域差分實現 | u I [ k ] = u I [ k ? 1 ] + K i T s e [ k ] \;u_I[k]=u_I[k-1]+K_i\,T_s\,e[k] uI?[k]=uI?[k?1]+Ki?Ts?e[k] | u I [ k ] = u I [ k ? 1 ] + K p T s T i e [ k ] \;u_I[k]=u_I[k-1]+\tfrac{K_p\,T_s}{T_i}\,e[k] uI?[k]=uI?[k?1]+Ti?Kp?Ts??e[k] |
- 在 離散模式 下,

- 勾選 “Use I*Ts” 時,PID Controller 塊中的“積分 (I)”文本框顯示的就是 K i T s K_i\,T_s Ki?Ts?,這個數值直接用于差分方程 u I [ k ] = u I [ k ? 1 ] + ( K i T s ) e [ k ] \;u_I[k]=u_I[k-1]+(K_iT_s)\,e[k] uI?[k]=uI?[k?1]+(Ki?Ts?)e[k]。
- 若 不勾選 “Use I*Ts”,文本框則顯示純粹的離散積分增益 K i K_i Ki?,塊會在后臺自動再乘以 T s T_s Ts? 來進行積分運算,即等效地使用 K i T s K_iT_s Ki?Ts?。
- 在 連續模式 下,無論是否有“Use I*Ts”,文本框顯示的都是連續域的積分增益
K i s \dfrac{K_i}{s} sKi?? 中的 K i K_i Ki?,即單位為“控制量/(誤差·秒)”的參數。
| 結構類型 | 文本框顯示(離散) | 差分方程增量 | Simulink 幫你做的事 |
|---|---|---|---|
| 并聯(Parallel) | K i T s K_iT_s Ki?Ts?(勾選 Use I*Ts) K i K_i Ki?(不勾選) | u I [ k ] = u I [ k ? 1 ] + ( K i T s ) e [ k ] \;u_I[k]=u_I[k-1]+(K_iT_s)\,e[k] uI?[k]=uI?[k?1]+(Ki?Ts?)e[k] | 若不勾選,塊會自動乘以 T s T_s Ts?;勾選則用文本框數值直接累加。 |
| 理想(I-Form) | T i T_i Ti?(始終) | u I [ k ] = u I [ k ? 1 ] + K p T s T i e [ k ] \;u_I[k]=u_I[k-1]+\tfrac{K_p\,T_s}{T_i}\,e[k] uI?[k]=uI?[k?1]+Ti?Kp?Ts??e[k] | 勾選后內部把 T i T_i Ti? 換算為 K p T s T i \tfrac{K_pT_s}{T_i} Ti?Kp?Ts??。 |
根據 MATLAB 官方文檔,

【Tip】
- 如果你 已經在 并聯下直接獲得了離散 K i T s K_iT_s Ki?Ts?(比如 Simulink 給你的那一欄),就直接拿來用,不要再二次換算;
在并聯(Parallel)結構下,Simulink 參數欄 “積分(I)”框里顯示的正是 K i T s K_i\,T_s Ki?Ts?(離散)或 K i K_i Ki?(連續),直接把 Simulink 中讀到的 “積分(I)” 值當做 K i T s K_i\,T_s Ki?Ts?(離散)或 K i K_i Ki?(連續)使用即可。- 如果是在 理想(I-Form) 下得到一個積分時間 T i T_i Ti?,“積分( I )” 填的是 T i T_i Ti?,它會自動在內部換算成 K p T s / T i K_pT_s/T_i Kp?Ts?/Ti?;python 實現需要再用
K i , d i s c r e t e = K p T s T i K_{i,\mathrm{discrete}} = \frac{K_p\,T_s}{T_i} Ki,discrete?=Ti?Kp?Ts??
換算成“每步累加增量”。
什么時候用連續域 vs 離散域?
-
如果把整個閉環模型當成一個離散‐時間系統 —— 比如用
x k + 1 = e A T s x k + A ? 1 ( e A T s ? I ) B u k x_{k+1} = e^{A\,T_s}\,x_k \;+\; A^{-1}(e^{A\,T_s}-I)\,B\,u_k xk+1?=eATs?xk?+A?1(eATs??I)Buk?
這樣的精確離散更新公式(基于矩陣指數)來推進狀態,那么整個控制器的設計、仿真與實現,就更自然地放在離散時域里:
- 在每個采樣點 k k k 計算誤差 e [ k ] e[k] e[k],更新離散 PID 差分方程,輸出 u k u_k uk?,然后用上面的公式算 x k + 1 x_{k+1} xk+1?。
- 這時把 Simulink 里“并聯形式”的離散 PID 差分方程直接拿過來用,就保證“數值上一致”。
- 連續域的 K i / s K_i/s Ki?/s 并不直接作用于這個仿真步長里,它只是一個設計思想——真正跑的時候都要離散化。
-
如果你打算在連續‐時間下設計 PID(比如先用頻域調參工具、根軌跡、Bode 曲線,得到 K i , K p , K d K_i,K_p,K_d Ki?,Kp?,Kd?),再把它離散化(如向后差分、雙線性變換 Tustin 法、零階保持 ZOH),那么就先在連續時域下選好參數,然后再用某種離散化方法轉換成離散差分形式。



















