摘 ? ?要
城市公共場所、校園等環境中,落葉的清掃一直是一個繁瑣而耗時的任務。傳統的人工清掃方式不僅效率低下,還存在人力浪費和安全隱患等問題。因此,研發一款能夠自主完成落葉清掃任務的機器人成為了當今研究的熱點之一。隨著科技的不斷進步,機器人技術也得到了飛速發展。利用機器人進行城市清潔工作已經成為了許多城市的重要發展方向。因此,研究城市清潔機器人已經成為了當前機器人領域的熱門話題之一。
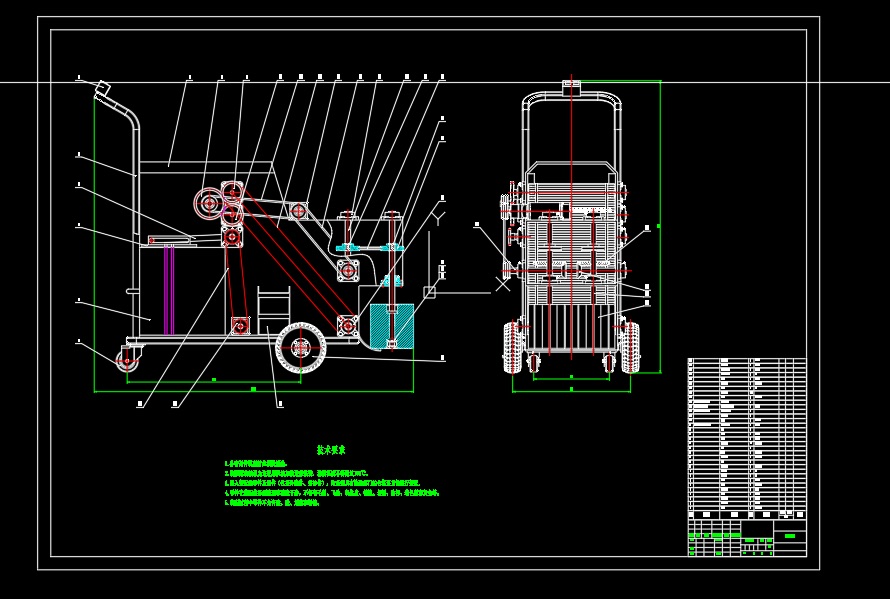
本文主要對手扶式落葉清掃機的機構設計,分別對清掃裝置、傳送裝置、壓縮裝置進行分析設計。采用機械強力擠壓的方法,把松散的落葉加工成固體塊狀以利于運輸儲存及二次利用,采用清掃輥解決了落葉粘附傳送鏈的問題,采用機械擠壓的方式提高了作業效率。整個落葉清掃機器人采用單片機進行控制,采用slam激光雷達進行定位導航,極大的提高了落葉清掃機器人的自動化程度。
落葉清掃機器人的研究,旨在解決城市公共場所、校園等環境中的落葉清掃難題,提高清掃效率,降低清掃成本,并減少對工人的依賴,從而達到節約資源、保護環境、提升城市品質的目的。
關鍵詞:落葉清掃;傳送裝置;機械設計;solidworks
目 ? ?錄
摘 ? ?要?? ?I
Abstract?? ?II
第1章 緒論?? ?1
1.1 課題的目的和意義?? ?1
1.2 課題背景?? ?2
1.3 文獻綜述?? ?2
1.3.1 落葉清掃機器人的發展概況?? ?2
1.3.2 國外的發展現狀?? ?3
1.3.3 國內的發展現狀?? ?4
1.3.4 落葉清掃機器人的發展趨勢?? ?5
1.4 本領域存在的問題?? ?6
1.5 本課題主要研究內容?? ?6
第2章 設計方案?? ?7
2.1 總體的設計要求?? ?7
2.2 總體的設計方案?? ?7
2.3 工作原理?? ?8
2.4 設計的主要參數?? ?9
2.4.1 動力方案選擇?? ?9
2.4.2 工作速度?? ?9
2.4.3 機架要求?? ?9
第3章 設計方案?? ?10
3.1 動力傳遞路線圖?? ?10
3.2 電機和電瓶的選擇?? ?10
3.2.1 電機總功率確定?? ?10
3.2.2 電動機及電瓶的選擇?? ?11
3.3 帶傳動設計計算?? ?12
3.4 3.4鏈傳動設計計算?? ?14
第4章 三維建模和有限元分析?? ?18
4.1 Solidworks?? ?18
4.2 落葉清掃機器人的有限元分析?? ?20
4.2.1 材料的選擇?? ?21
4.2.2 網格劃分?? ?22
4.2.3 后處理?? ?22
4.3 工藝分析?? ?23
結 ? ?論?? ?25
致 ? ?謝?? ?26
參考文獻?? ?27
附 ?錄 1?? ?28
附 ?錄 2?? ?29
第1章 緒論
1.1 課題的目的和意義
落葉清掃機器人是一種能夠自主完成落葉清掃任務的智能機器人。它可以在城市公共場所、校園等環境中自動行走,利用激光雷達和攝像頭進行環境感知,通過輪式驅動和雙臂清掃機構收集落葉,并具備自主充電功能。近年來,隨著城市化進程的不斷加速,城市公共場所、校園等環境中的落葉清掃問題越來越突出,傳統的人工清掃方式效率低下,存在人力浪費和安全隱患等問題。因此,開發一款能夠自主完成落葉清掃任務的機器人已經成為研究的熱點之一。
落葉清掃機器人研究的目的是利用先進的機器人技術解決城市公共場所、校園等環境中的落葉清掃難題,提高清掃效率,降低清掃成本,并減少對工人的依賴,從而達到節約資源、保護環境、提升城市品質的目的。
首先,落葉清掃機器人可以大幅提高清掃效率。傳統的人工清掃方式效率低下,需要大量的人力物力進行清掃,而落葉清掃機器人可以自主行走、感知環境、收集落葉等操作,具備高效的清掃能力。機器人采用激光雷達和攝像頭等設備進行環境感知,可360度無死角地探測周圍環境,避開障礙物,從而提高了清掃效率。
其次,落葉清掃機器人還可以降低清掃成本。傳統的人工清掃方式需要耗費大量的人力物力,清掃成本較高,而落葉清掃機器人一次性投入成本比較高,但使用壽命長,長期來看總體成本更低。
再者,落葉清掃機器人減少對工人的依賴,避免工人在清掃過程中可能發生的安全事故,保證了工作人員的生命安全和健康。同時,對于校園等場所而言,落葉清掃機器人的使用還可以節約學校資源,避免人力資源的浪費。
最后,落葉清掃機器人的研究還可以降低對環境的污染,保護城市生態環境。在傳統的人工清掃方式中,使用大量的化學藥物和機械設備,對環境產生了不良影響,而落葉清掃機器人采用無污染的清掃方式,更符合現代城市綠色發展的理念。
綜上所述,落葉清掃機器人的研究意義重大,有助于提高城市清潔工作效率,降低清掃成本,并減少對工人的依賴,從而達到節約資源、保護環境、提升城市品質的目的。
1.2 課題背景
城市化進程的加速和人們生活水平的提高,使得城市公共場所、校園等環境中的落葉清掃問題越來越突出。傳統的人工清掃方式效率低下,需要投入大量的人力物力進行清掃,而且存在人力浪費、安全隱患等問題,已經不能適應現代城市快速發展的需求。因此,開發一款能夠自主完成落葉清掃任務的機器人已經成為研究的熱點之一。
隨著科技的不斷發展,機器人技術也得到了飛速進步,尤其是在感知、導航和控制等方面的技術突破,推動著智能機器人的發展。利用機器人進行城市清潔工作已經成為許多城市智慧化發展的方向之一,落葉清掃機器人作為其中的重要組成部分,具有重要的應用前景和市場需求。
落葉清掃機器人的研究背景主要包括以下幾個方面:
(1)城市化進程的快速發展:隨著城市化進程的不斷加速,城市公共場所、校園等環境中的落葉清掃問題越來越突出,傳統的人工清掃方式效率低下,已經不能適應現代城市快速發展的需求。為了提高城市綠化水平和保障城市環境的美觀整潔,研究一款自主完成落葉清掃任務的機器人具有重要意義。
(2)智能機器人技術的進步:隨著感知、導航、控制等方面的人工智能技術的不斷進步,機器人技術也得到了飛速發展。利用機器人進行城市清潔工作已經成為許多城市智慧化發展的方向之一,落葉清掃機器人作為其中的重要組成部分,具有廣泛的應用前景和市場需求。
(3)傳統落葉清掃方式存在的問題:傳統的落葉清掃方式需要投入大量的人力物力進行清掃,效率低下,且存在人力浪費、安全隱患等問題。在城市公共場所、校園等環境中,使用機器人進行清掃可以有效降低成本,提高清掃效率,減少對工人的依賴,避免工人在清掃過程中可能發生的安全事故。
綜上所述,落葉清掃機器人的研究背景是城市化進程的加速、智能機器人技術的進步以及傳統落葉清掃方式存在的問題。開發一款能夠自主完成落葉清掃任務的機器人,將有助于提高城市清潔工作效率和環境衛生水平,減少對工人的依賴,從而為現代城市的可持續發展做出貢獻。
1.3 文獻綜述
1.3.1 落葉清掃機器人的發展概況
落葉清掃機器人是一種能夠自動收集和處理落葉的智能化設備。隨著人工智能、自動駕駛、傳感器技術的不斷發展,落葉清掃機器人的功能和性能也在不斷提高。早期的落葉清掃機器人主要是通過機械方式收集落葉,但這種方式容易造成廢物的浪費和環境污染。隨著技術的進步,新一代的落葉清掃機器人采用了更加先進的技術來實現自主導航和智能識別,減少廢棄物的產生并提高清掃效率。目前,落葉清掃機器人已經廣泛應用于城市公園、大型商業區、校園等場所。一些公司還開始開發具有多功能的清掃機器人,如增加摳草、修剪、除雪等功能,以滿足不同用戶的需求。
1.3.2國外的發展現狀
落葉清掃機器人在國外的發展已經相當成熟,許多公司和研究機構都投入了大量資金和精力來開發和推廣這種智能化設備。以下是落葉清掃機器人在國外的發展現狀:
日本是落葉清掃機器

 ?
?
 ?
?
 ?
?
 ?
?
?

)
)






)









