在支持向量機的分類模型中,我們會遇到兩大類模型,一類是線性可分的模型,還有一類是非線性可分的。非線性可分模型是基于線性可分的基礎上來處理的。支持向量機比較適合小樣本的訓練。
線性可分
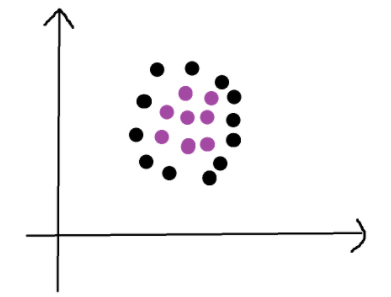
如下圖所示,有紫色和黑色兩類,可以用一條直線對數據進行完全分類。這樣叫做線性可分
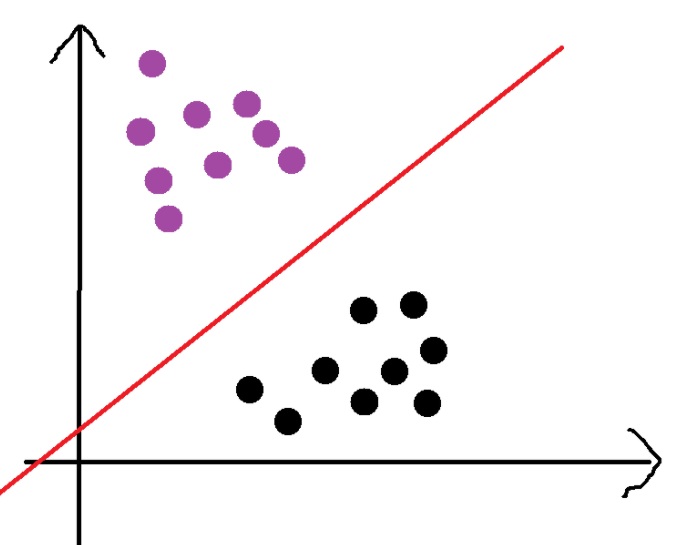
由上圖我們可以看出,這兩類點可以由無限根直線給分割開,那么我們該怎么找出最好的那一根呢?我們該怎么衡量最好的呢?我們該怎么用數學表達式來表述出這個最好的那個數學表達式呢?
具體做法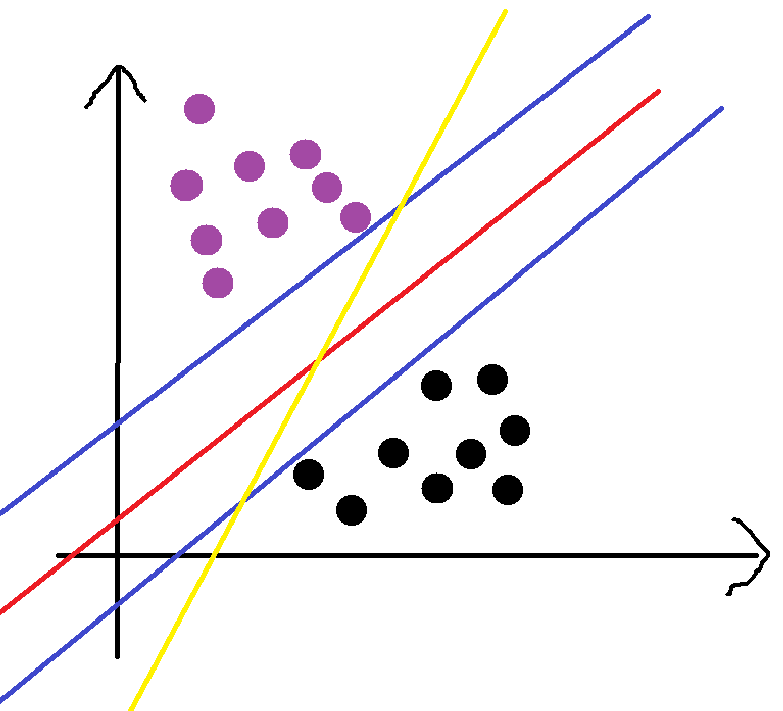
光憑感覺,我們可以知道,上圖中的紅線最好,可能從兩方面想到,紅線的數據的權重相對于黃線考慮到的更多,更重要的是紅線對數據誤差的容忍度更高,因為紅線剛好處于中間數據萬一由于錯誤偏移一點,也是可以分類正確的。我們該怎么量化這個呢?
找最優
上圖中,兩條藍線是經過紅線平移,平移到恰好與黑點或者紫點相交的位置。要求最好,所以我們要讓這兩條線之間的距離d最大,這樣也就確定了斜率值,但是在這兩條藍線中存在無數條紅線,我們要確定紅線我們還要讓d/2最大,這樣也就確定了截距。這樣我們就語言描述出最好是什么樣的了,下面我們來用數學公式表達出。(藍線剛好要碰到的點就是支持向量)
定義
在我們進行數學公式表達之前,我們先對需要的進行定義。
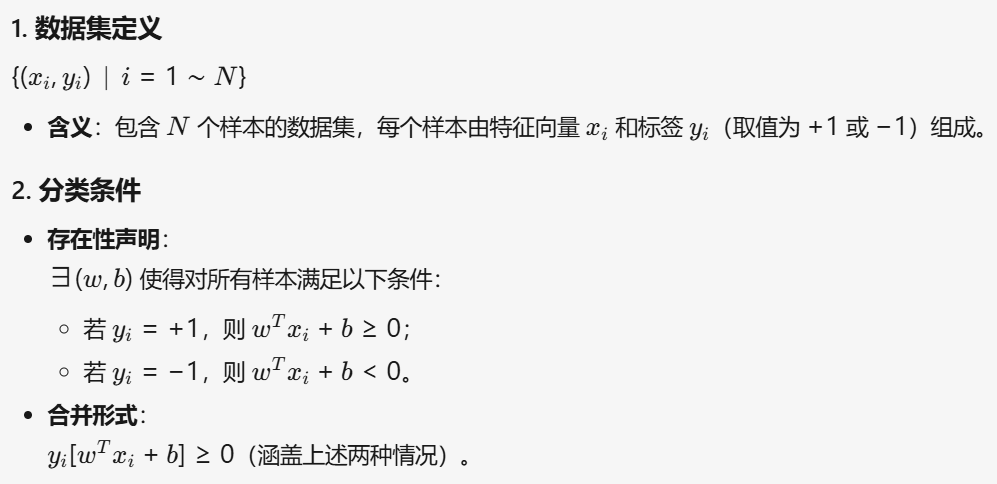
1 訓練數據及標簽
????????????????????????????????????????
這里我們假設數據為二維的(其實一樣的,二維的我們建立的是一條線,如果是三維的,我們就建立一個最優平面,如果是高維的我們就建立一個最優的超平面,所用公式一樣。)
這里標簽我們就假設為????????+1??和? -1(方面后面計算,對結果沒影響)
2 訓練模型
??????????????????????????????????????????????????????????????????????![]()
這里是W和X是相同維度的
3 線性可分
必要知識
1?![]()
后面雖然乘a,但對這個線或者超平面是不會發生改變的。
2 點到線距離公式(向量到超平面距離公式)
特征縮放
????????????????????????????????????????????????????? (a>0)
(a>0)
我們進行這一操作,對超平面的幾何位置不會產生任何改變。
根據這個我們可以寫出,肯定會存在一個a使得
??????????????????????????????????????????????????????????????????????????????????
這里等于1只是為了方便計算,意思就是使得支持向量?X0??到超平面的函數間隔等于 1。
縮放后,支持向量滿足?∣w?X0?+b∣=1,此時所有其他樣本點滿足?∣w?Xi?+b∣≥1
這樣上面d的公式就變為了??????????????????????????????????????
????????????????????????????????????????????????????????????????????
我們要求d的最大值,也就是求分母W的最小值。
優化問題
????????????????????????最小化?????? ? ??????????????????????![]()
????????????????????????限制條件? ? ? ? ? ? ??
線性不可分
這類又存在兩種情況,一種是???????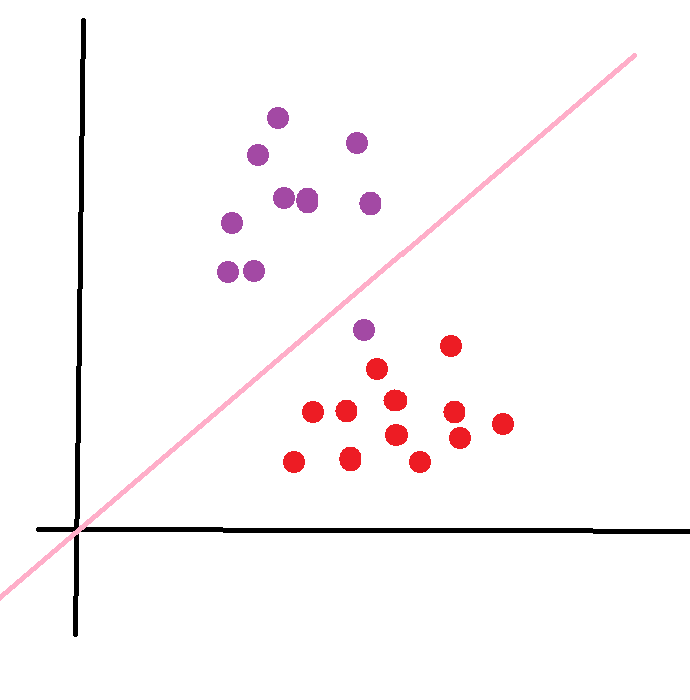
上面這類情況,和我們上面差不多,我們可以用直線給分隔開,但是代價太高了,所有我們可以加上一個松弛變量
目標函數(最小化)????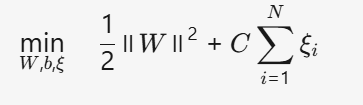

高維映射
上面對非線性的處理還是不夠的,因為有可能會存在下面一種情況。
對于上面,我們不可能用一條線給分開了,這個時候我們要把低維向量映射到高維中,這樣就可分了。在一個平面上取若干點,不同類,如果我們維度函數轉化為無限維,這樣我們可以分類所有的分類的問題。下面我舉一個特別簡單的小例子
簡單示例
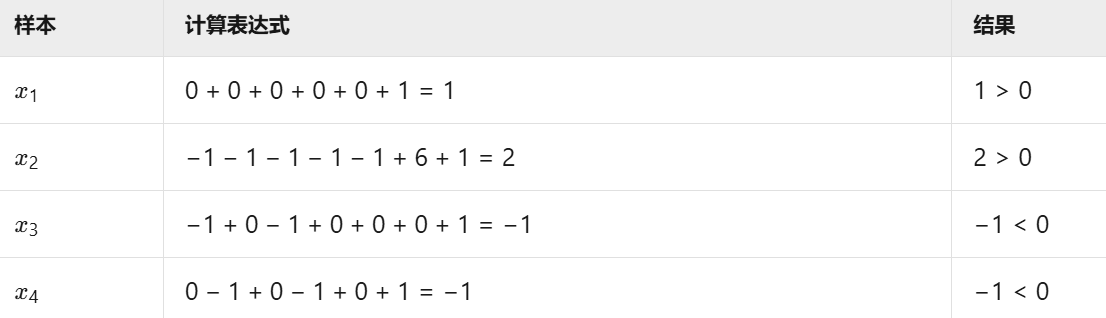
???????????????????????????????????????????????????????????????????????????????????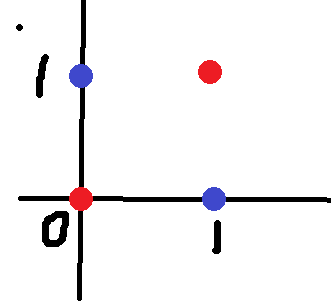
在這樣一個數據中,不存在一條線能完全把紅藍兩類點分開。
其中???????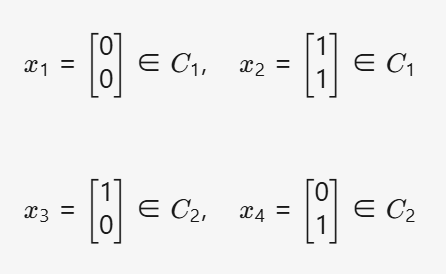
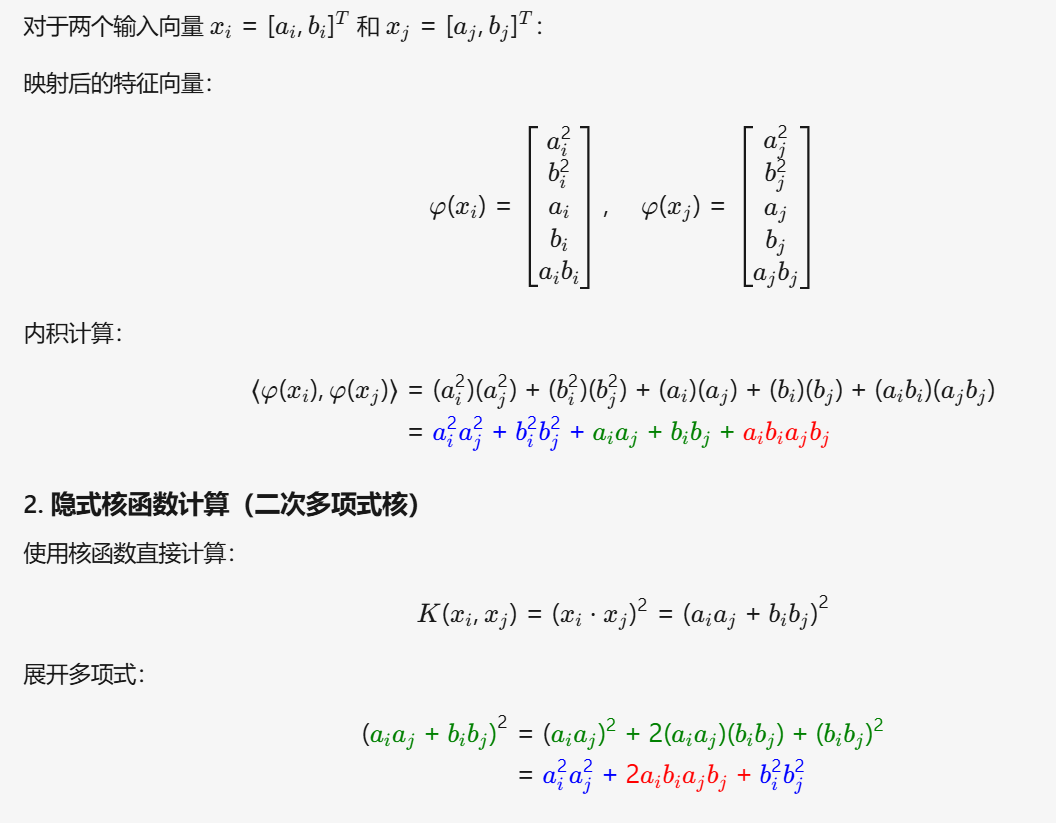
我們想著是不是可以把這個映射到高維中,然后就可以用一個超平面來分隔,這個映射的法則就叫做核函數。
核函數
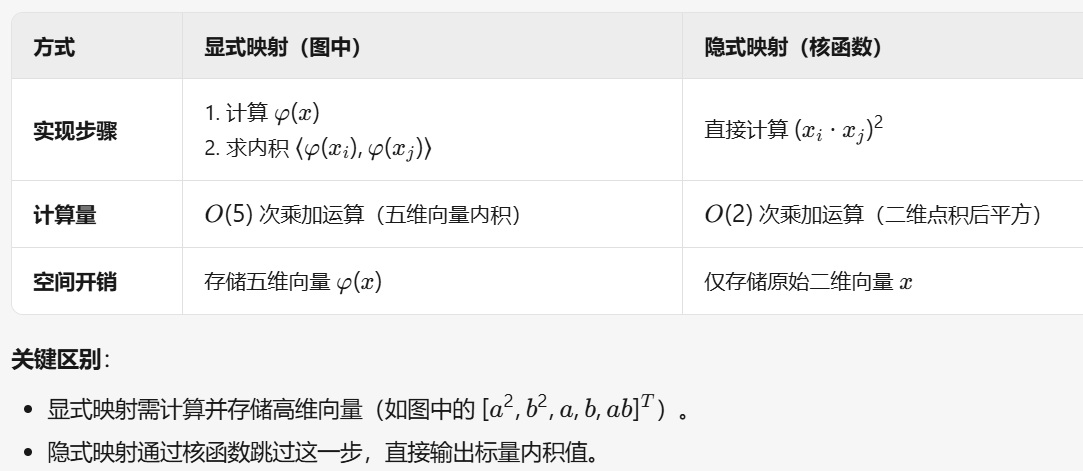
核函數(Kernel Function)是支持向量機(SVM)中的關鍵組件,用于將原始輸入數據映射到高維特征空間,從而解決非線性分類問題。核函數通過隱式計算高維空間的內積,避免了顯式映射的計算復雜度。
我們假設一個法則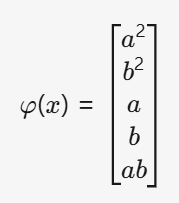
轉化為:???????
于是我們可以構造一個超平面??????????????
可以把他們分割
高維映射的優化式子
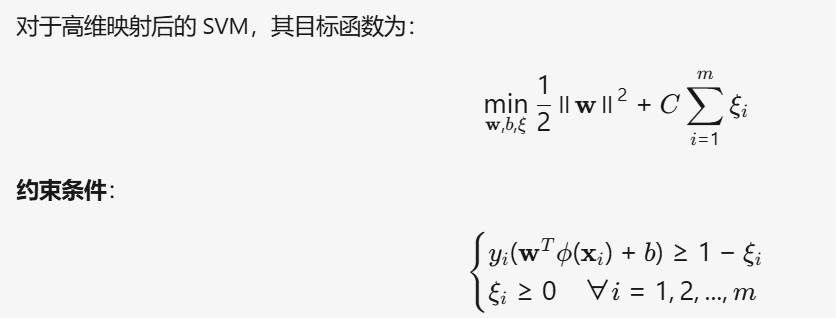
求最優W和b

SVM中的API接口
SVC( C=1.0, kernel='rbf', degree=3, gamma='scale', coef0=0.0, shrinking=True, probability=False, tol=0.001,
cache_size=200, class_weight=None, verbose=False, max_iter=- 1, decision_function_shape='ovr',
break_ties=False, random_state=None)
上面全是默認參數值
以下是 SVC(支持向量分類器)中最關鍵的參數及其簡明解析,基于專業實踐和文檔總結
:
| ?參數名? | ?默認值? | ?作用機制? | ?影響效果? | ?典型設置建議? |
|---|---|---|---|---|
?C* | 1.0 | 控制分類錯誤的懲罰強度 | - ?值大?:嚴格懲罰誤分類 → 邊界復雜,易過擬合 ↑ - ?值小?:容忍更多錯誤 → 邊界平滑,泛化性強 ↓ | 網格搜索(如?[0.01, 0.1, 1, 10, 100]) |
?kernel | 'rbf' | 定義數據映射到高維空間的方式 | -?linear:線性可分數據(高效)-? rbf:非線性數據(默認首選)-? poly/sigmoid:特定場景適用 | 優先嘗試?rbf,線性數據用?linear |
?gamma | 'scale' | 控制樣本影響力范圍(RBF/Poly/Sigmoid核有效) | - ?值大?:樣本影響范圍小 → 決策邊界復雜,易過擬合 ↑ - ?值小?:樣本影響范圍大 → 邊界平滑,易欠擬合 ↓ | 'scale'(自動計算)或網格搜索(如?[0.001, 0.01, 0.1]) |
?degree | 3 | 多項式核的階數(僅?kernel='poly'?有效) | - ?階數高?:擬合復雜模式,但易過擬合 ↑ - ?階數低?:模型簡單,可能欠擬合 ↓ | 通常取?2~5,需配合調?C?和?gamma |
?class_weight | None | 調整類別權重(應對樣本不平衡) | -?None:所有類權重相等-? 'balanced':按類別頻率自動加權 | 樣本不均衡時必選?'balanced' |
?decision_function_shape | 'ovr' | 多分類策略選擇 | -?'ovr':一對其余(速度快)-? 'ovo':一對一(精度高,計算量大) | 默認?'ovr'?即可,類別多時考慮?'ovo' |
代碼實戰
import pandas as pd
data=pd.read_csv('iris.csv')
print(data.head())
X=data.iloc[:,[1,3]]
y=data.iloc[:,5]
from sklearn.model_selection import train_test_split
# X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)from sklearn.svm import SVC
model = SVC(kernel='linear', C=float('inf'))
# model = SVC(kernel='linear', C=1)
model.fit(X, y)
# y_pred = model.predict(X_test)a=model.coef_[0]
b=model.intercept_[0]print(a,b)from sklearn import metrics
print(metrics.classification_report(y,model.predict(X)))import matplotlib.pyplot as plt
import numpy as npX1=data[data.iloc[:,5]==1].iloc[:,[1,3]]
X0=data[data.iloc[:,5]==0].iloc[:,[1,3]]plt.scatter(X1.iloc[:,0],X1.iloc[:,1],c='red')
plt.scatter(X0.iloc[:,0],X0.iloc[:,1],c='blue')x1=np.linspace(0,7,100)
x2=(x1*a[0]-b)/a[1] #-b!!!并且這里
x3=(x1*a[0]-b+1)/a[1]
x4=(x1*a[0]-b-1)/a[1]
plt.plot(x1,x2)
plt.plot(x1,x3)
plt.plot(x1,x4)
plt.show()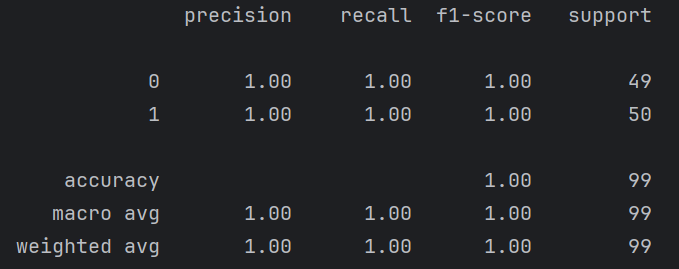
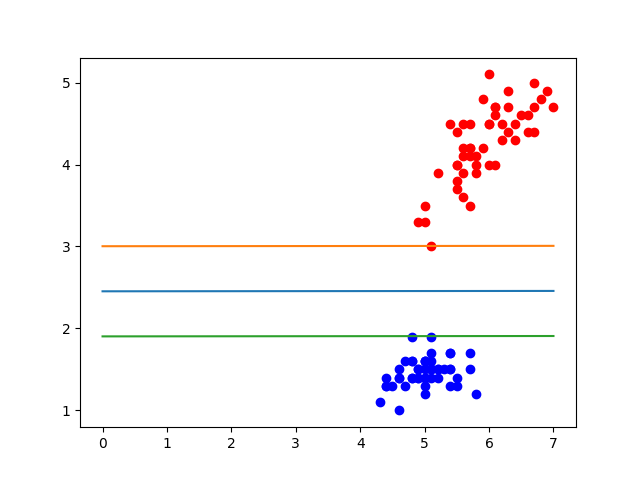
下面是對其中兩個特征進行劃分的結果圖。可以看出準確率特別高。
總結
1 float('inf')表示無限大
2 繪圖的時候注意是WX+b=0,要把一個x作為縱坐標要稍加處理
3 這個如果訓練的時候對數據做切分處理了,可能有未被計算的點離我們的超平面距離小于1。


![[激光原理與應用-184]:光學器件 - 光學器件中晶體的用途、分類、特性及示例](http://pic.xiahunao.cn/[激光原理與應用-184]:光學器件 - 光學器件中晶體的用途、分類、特性及示例)








Solution)






)
