電動汽車的轉向系統作為電動汽車的一個關鍵系統,與燃油車的轉向系統有著較大差異。電動汽車的轉向系統主要分為 電動助力轉向(EPS, Electric Power Steering) 、電動液壓助力轉向系統(EHPS, Electro-Hydraulic Power Steering)和 線控轉向(SBW, Steer-By-Wire)三大類。不同類型的轉向系統有著不同的工作原理優缺點和適用范圍,本文介紹這三種電動汽車轉向系統的組成及其工作原理。
目錄
一. 電動助力轉向系統(EPS)
1、EPS 的組成
2. EPS工作原理
3、EPS 的分類及適用范圍
4、EPS 的優缺點
二、?電動液壓助力轉向系統(EHPS)
1. EHPS 的組成
2. EHPS 的工作原理
3. EHPS 的優缺點
三. 線控轉向系統(SBW)
1、SBW 的組成
2、SBW 的工作原理
3、SBW 的優缺點
四、總結
一. 電動助力轉向系統(EPS)
EPS 是目前電動汽車最常用的轉向系統,它通過電機提供助力,取代了傳統的液壓助力轉向(HPS)。 ?
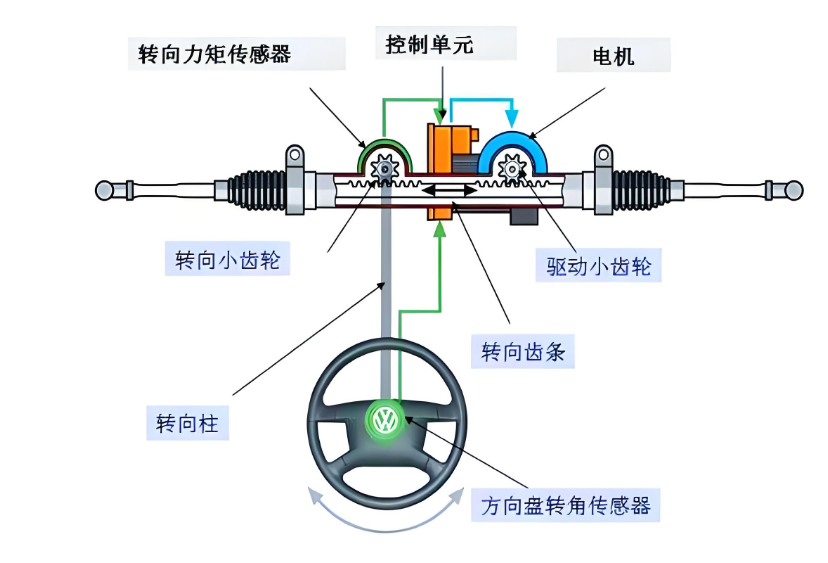
1、EPS 的組成
EPS主要由以下部件構成:
(1)扭矩傳感器:檢測方向盤轉動的力矩和方向(駕駛者意圖)。
(2)轉向角傳感器:監測方向盤轉角(部分系統集成在扭矩傳感器中)。
(3)車速傳感器:提供車速信號(用于動態調整助力大小)。
(4)電子控制單元(ECU):實時處理傳感器數據,計算所需助力大小。
(5)助力電機:通常為無刷直流電機(BLDC),通過減速機構(如蝸輪蝸桿)將扭矩傳遞到轉向柱或齒條。
(6) 減速機構:放大電機扭矩,驅動轉向系統。?
2. EPS工作原理
(1)檢測駕駛者意圖
當駕駛員轉動方向盤時,扭矩傳感器測量轉向軸的扭轉力矩,轉向角傳感器記錄轉角,并將信號發送至ECU。
車速信號同步輸入(例如:低速時需更大助力,高速時減少助力以增強穩定性)。
(2)ECU計算助力需求
ECU根據扭矩、車速、甚至車身狀態(如傾斜角度,部分高端車型)計算目標助力大小,并輸出PWM信號控制電機。
算法示例:
低速泊車:助力電機輸出高扭矩(轉向輕便)。
高速行駛:助力減弱(提升路感,避免過度靈敏)。
(3)電機執行助力
電機通過減速機構(如蝸輪蝸桿、皮帶等)將動力傳遞至轉向柱或直接驅動齒條(不同EPS類型結構差異,見下文)。
電機助力方向與駕駛員轉向方向一致(通過扭矩傳感器極性判斷)。
(4)反饋與修正
系統持續監測方向盤扭矩和實際轉向角度,動態調整電機輸出,實現閉環控制,避免過度助力或滯后。
3、EPS 的分類及適用范圍
根據電機安裝位置的不同,EPS 可分為以下幾種類型: ?
| 類型 | 電機位置 | 適用車型 | 特點 |
|---|---|---|---|
| C-EPS(轉向柱式) | 安裝在轉向柱上 | 小型車、微型車 | 結構簡單,成本低,但助力較小 |
| P-EPS(小齒輪式) | 安裝在轉向小齒輪上 | 緊湊型/中型車 | 助力適中,平衡性好 |
| R-EPS(齒條式) | 直接驅動齒條? | 中大型車、SUV | 助力大,響應快,適合重型車輛 |
| DP-EPS**(雙小齒輪式) | 兩個電機分別驅動小齒輪和齒條 | 高性能車、豪華車 | 轉向更精準,動態響應更好 |
4、EPS 的優缺點
優點
?(1)高能效,續航友好:EPS直接由電機驅動,無需液壓泵,能量損耗極低(傳統HPS會持續消耗發動機功率)。對電動汽車而言,節省的能量可間接提升續航里程(約3%-5%的能效優化)。
(2)靈活可調的轉向助力:通過軟件可動態調整助力大小,適應不同場景(如低速輕盈、高速沉穩),甚至支持個性化駕駛模式(運動/舒適)。 ?
(3)結構簡單,維護成本低:省去液壓油、泵、管路等部件,減少漏油風險,降低后期維護需求。
(4)環境適應性強:不受極端溫度影響(液壓系統在低溫下油液粘稠,導致轉向遲滯)。
(5)支持高級駕駛輔助(ADAS):支持車道保持、自動泊車等高級駕駛輔助功能。
缺點
(1)路感反饋較弱:電動助力的模擬路感不如液壓系統自然。
(2)依賴電控系統可靠性:若電機、傳感器或控制軟件故障,可能導致助力突然失效(雖有余設計,但風險仍存在)。
(3)高負載場景助力不足:大功率電機成本高,部分廉價車型在極端工況(如原地打輪)可能助力不足。
二、?電動液壓助力轉向系統(EHPS)
電動卡車由于負載大、轉向系統需要更強的助力,因此部分車型會采用電動液壓助力轉向系統(EHPS, Electro-Hydraulic Power Steering),即在傳統液壓助力轉向(HPS)的基礎上引入電控技術,以提高能效和可控性。

1. EHPS 的組成
EHPS 系統主要由以下部件組成:
(1)電動液壓泵(取代傳統發動機驅動的液壓泵)
由電機驅動,獨立于發動機運行,適合電動汽車。
通常采用無刷直流電機(BLDC)?或永磁同步電機(PMSM),以提高能效。
(2)液壓助力機構(齒輪齒條或循環球式轉向機)
與HPS類似,但油壓由電控系統精準調節。
(3)電子控制單元(ECU)
根據車速、轉向扭矩等信號調節液壓泵的轉速和壓力。
(4) 儲油罐、液壓管路、轉向閥
與傳統HPS相同,負責液壓油的存儲和流動控制。
2. EHPS 的工作原理
(1)信號采集
駕駛員轉動方向盤時方向盤扭矩傳感器檢測駕駛員的轉向意圖(轉向力大小和方向)。車速傳感器提供當前車速信息(低速時助力大,高速時助力小)。
(2)ECU 計算所需助力
ECU 根據?扭矩、車速、轉向角度等數據,計算出合適的?液壓壓力需求,并控制?電動液壓泵的轉速。
低速時(如泊車):電機高速運轉,提供大流量液壓油,轉向更輕便。
高速時:電機降速,減少助力,增強方向盤“沉穩感”,提高行駛穩定性。
(3)電動液壓泵提供壓力
電機驅動液壓泵,將液壓油加壓后輸送到轉向控制閥。
控制閥根據方向盤扭矩方向,將液壓油導入液壓缸的相應腔室,推動齒條或轉向連桿,實現助力。
低速/重載:提高油壓,增強助力,使轉向更輕便。
高速/空載:降低油壓,減少助力,提升行駛穩定性。
(4)液壓油循環
助力完成后,液壓油流回儲液罐,形成閉環循環。
3. EHPS 的優缺點
優點
(1)大扭矩助力:適合重型電動卡車、商用車,比EPS能提供更強的轉向力。
(2)可靠性高:液壓系統成熟,在極端工況(如低溫、高負荷)下表現穩定。
(3) 成本適中:比EPS(大功率電機+減速機構)更經濟,比傳統HPS更節能。
缺點
(1)能耗較高:電動液壓泵持續工作,比EPS耗電(但比傳統HPS節能)。
(2)結構復雜:需要液壓管路、儲油罐等,維護較EPS稍麻煩。
(3)響應稍慢:相比EPS,液壓系統的動態調節速度略低。
三. 線控轉向系統(SBW)
SBW(Steer-By-Wire)是未來轉向系統的發展方向,完全取消了方向盤和車輪之間的機械連接,完全依賴電信號控制轉向。 ?
1、SBW 的組成
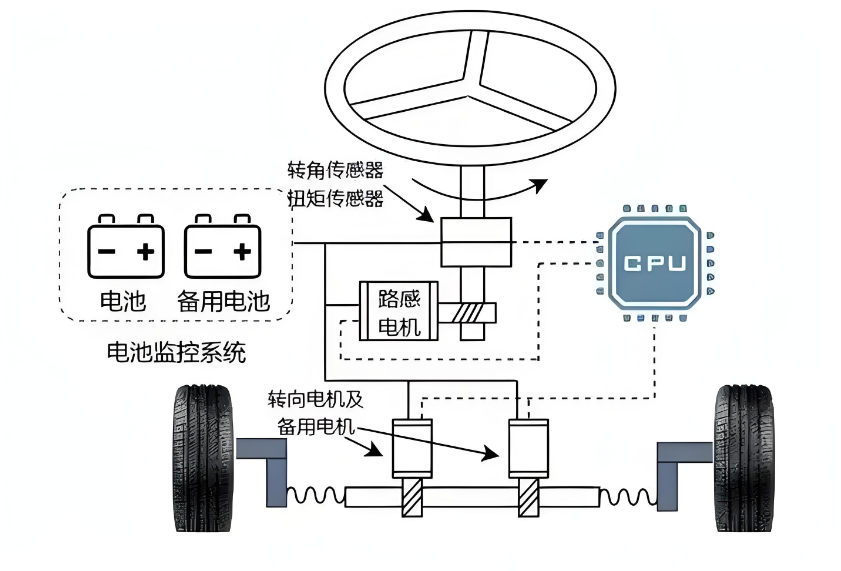
SBW系統主要由以下部件組成:
(1)方向盤模塊
負責檢測駕駛員轉向意圖并模擬路感反饋,包括:方向盤扭矩/轉角傳感器、路感反饋電機和
方向盤電子控制單元
(2)轉向執行模塊
負責驅動車輪轉向,取代傳統轉向柱和齒輪齒條機構,包括:轉向執行電機、轉向角傳感器和減速機構(如滾珠絲杠或齒輪組)
(3)電子控制單元(ECU)
SBW的“大腦”,負責信號處理和系統協調,包括:主ECU和冗余ECU
(4)冗余安全系統
為確保安全性,SBW必須配備多重備份,包括:雙電源供電、雙通信通道和機械應急備份
2、SBW 的工作原理
(1)信號采集(方向盤模塊)
扭矩/轉角傳感器:檢測駕駛員轉動方向盤的力度和角度,轉換為電信號。
車速、橫擺角速度等信號:通過CAN總線獲取車輛狀態(如ESP、ABS數據),用于計算最佳轉向響應。
(2)電子控制(ECU決策)
主ECU:根據傳感器信號計算目標轉向角度(結合車速、駕駛模式等動態調整轉向比)和路感反饋強度(模擬輪胎與路面的相互作用力)。
冗余ECU:?實時監控主系統,一旦檢測到故障(如信號丟失、電機異常),立即接管或啟動應急模式。
(3)轉向執行(車輪驅動)
轉向執行電機(通常為高扭矩無刷電機)直接驅動齒條或轉向節,推動車輪轉向。
位置傳感器?實時反饋車輪實際轉向角,形成閉環控制,確保精準執行ECU指令。
(4)路感模擬(方向盤反饋)
路感反饋電機在方向盤上施加?可編程阻力,模擬傳統轉向系統的機械路感(如顛簸、輪胎抓地力變化)。
3、SBW 的優缺點
優點
?(1)無機械連接:提高底盤布局靈活性,增加車內空間。 ?
?(2)可變轉向比:方向轉動角度和車輪轉向角度可自由調節(如低速時方向盤更靈敏,高速時更穩定)。 ?
?(3)完美適配自動駕駛:可完全由電腦控制轉向,無需駕駛員干預。 ?
?(4)更安全的碰撞保護:無轉向柱,碰撞時不會侵入駕駛艙。 ?
缺點
(1)高成本:需要高可靠性電子元件和冗余系統。 ?
(2)法規限制:目前部分國家要求保留部分機械備份(如豐田的SBW系統仍保留離合器應急連接)。 ?
(3)消費者接受度:部分用戶對“無機械連接”的轉向方式存在疑慮。 ?
四、總結
本文介紹了電動汽車的三種不同形式的轉向系統及其工作原理。電動卡車由于轉向負載大,EHPS(電動液壓助力)仍然是目前的主流方案,它在助力強度、可靠性和成本之間取得了較好平衡。但隨著高功率EPS技術的發展,未來部分電動卡車可能會轉向EPS或混合轉向系統。目前,EPS仍是性價比最高的解決方案,并大范圍應用。未來電動汽車轉向系統將從 EPS(電動助力) 向 SBW(線控轉向)演進,SBW將憑借更高的靈活性和自動駕駛兼容性成為主流。





服務器/多客戶端模型)


——設備樹(上))
)



)



Day10)

