博客主頁:【夜泉_ly】
本文專欄:【暫無】
歡迎點贊👍收藏?關注??

目錄
- 前言
- 關于如何sleep
- 實現思路
- Pixmaps
- pixmaps.h
- pixmaps.cpp
- MapSquare
- mapsquare.h
- mapsquare.cpp
- dfsthread
- dfsthread.h
- dfsthread.cpp
- run dfs
- 其他
- Widget
- Unit
- 其他
Qt -DFS算法可視化
完整代碼:https://gitee.com/Ye_Quan/my-cpp-project/tree/master/Qt-experiments/dfs-visualizer
前言
本來,我是在搞我的戰棋小游戲的,
如果大家玩過戰棋應該知道,
當我們點擊一個單位時,
一般會顯示出一片區域,
表示這個單位的移動范圍(以及可攻擊目標等等)。
我當時就想到了用DFS和BFS,
然后就寫了。
之后我想,
既然已經在游戲中實現了DFS,
那能不能以現有代碼為基礎,
寫一個DFS算法可視化呢?
感覺很有意思,
所以有了本文。
當然,雖然標題叫做DFS可視化,
但是代碼部分大多是在對戰棋游戲的實現進行試驗,
因此存在很多‘多余’的設計,大家看看就行。
關于如何sleep
既然是可視化,
那必定不能等DFS完了再更新地圖狀態,
因此我決定在每次更新了一個格子的狀態后,
就暫停一會兒再繼續DFS。
結果問題來了,
怎么做到每次都暫停一會兒?
我本來想直接在DFS中直接加sleep就好了:
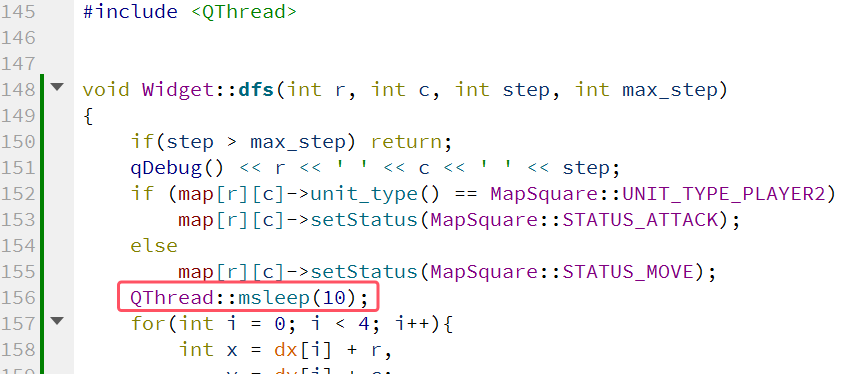
然后程序卡了,
DFS完了才更新界面。
我以為是沒用信號觸發的問題,
改成用信號觸發地格更新:
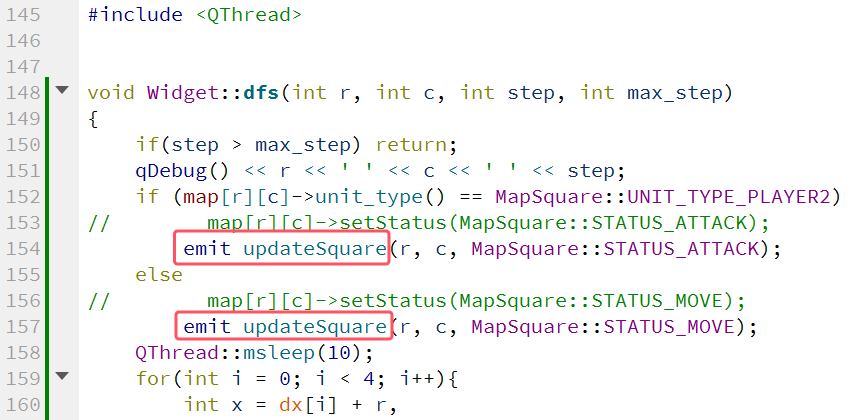
結果還是不行。
為什么?
最開始我以為和Linux中多線程競爭鎖的問題類似,
大概描述一下就是:
搶鎖 - 我搶到了! - 我釋放 - 欸我離得近,我再搶!
然后發現了一個本質的區別:
這里只有一個線程啊🤣!
問題出在事件隊列:
當前這個DFS就是事件隊列的一個事件,
而DFS發送的信號所觸發的事件,
不過是去事件隊列后面排隊罷了,
那現在執行的是誰?
還是DFS!
我DFS沒跑完,
你們后面的事件都別想跑!
所以用QTimer?
我這是DFS。。。
如果用QTimer,那得搞個stack,
然后用類似非遞歸版的DFS來做吧?
我最終的解決方案是,
使用子線程跑DFS,
這樣就不會阻塞主線程的事件隊列了。
實現思路
那么大致分為幾個模塊
首先是圖片模塊,
這里搞的單例模式,
用于加載圖片給所有人用。
為什么提前加載?
因為不這樣做會很卡。。。
然后是地圖格模塊,
我感覺地圖格在戰棋游戲中還挺重要的,
所以把很多屬性存進去了,
這里只是個DFS可視化,
所有只保留關鍵的一些屬性。
然后是子線程模塊,
主要作用是進行DFS和發送信號。
最后就是widget主窗口,
進行初始化地圖,處理用戶交互等工作。
Pixmaps
比較簡單,比較作用就是加載和存儲圖片。
注意這里不能用餓漢模式,
圖片的加載必須放在QApplication對象創建之后。
pixmaps.h
#ifndef PIXMAPS_H
#define PIXMAPS_H
#include <QPixmap>
class Pixmaps {static Pixmaps *getInstance();
private:Pixmaps();Pixmaps(const Pixmaps&) = delete;static void* _instance;
public:QPixmap map0, map1, map2, map3, dst, src;const int map_width = 100, map_height = 100,unit_width = 80, unit_height = 80;
};
#endif // PIXMAPS_H
pixmaps.cpp
#include "pixmaps.h"
void* Pixmaps::_instance = nullptr; // 這個不能放.h -- 會造成重定義問題// 報錯會提示在其他包含了這個.h文件中, 重定義了_instance
Pixmaps* Pixmaps::getInstance(){if(_instance == nullptr){// 加鎖。。。懶得加了if(_instance == nullptr){_instance = new Pixmaps;}}return (Pixmaps*)_instance;
}Pixmaps::Pixmaps(): map0("://image/map0.png"), map1("://image/map1.png"), map2("://image/map2.png"), map3("://image/map3.png"), map_src("://image/map_src.png"), map_dst("://image/map_dst.png")
{map0 = map0.scaled(map_width, map_height, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);map1 = map1.scaled(map_width, map_height, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);map2 = map2.scaled(map_width, map_height, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);map3 = map3.scaled(map_width, map_height, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);map_dst = map_dst.scaled(map_width, map_height, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);map_src = map_src.scaled(map_width, map_height, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);
}
單例,只是為了讓別人更方便的用圖片罷了,
所以不用搞太復雜 - - 至少這里不用。
MapSquare
地格類
mapsquare.h
#ifndef MAPSQUARE_H
#define MAPSQUARE_H
#include <QLabel>
#include "pixmaps.h"class MapSquare : public QLabel
{Q_OBJECT
public:MapSquare(QWidget *parent = nullptr);enum UNIT_TYPE{UNIT_TYPE_EMPTY = 0,UNIT_TYPE_PLAYER1 = 1,UNIT_TYPE_PLAYER2 = 2};enum STATUS{STATUS_UNCHECKABLE = -1,STATUS_EMPTY = 0,STATUS_MOVE = 1,STATUS_ATTACK = 2,};void setStatus(STATUS new_status, bool update_pixmap = true);void setUnitType(UNIT_TYPE new_type);void setIndex(int r, int c);void setSrc(int r = -1, int c = -1);void setUnit(void* unit = nullptr);STATUS status(){return _status;}UNIT_TYPE unit_type(){return _unit_type;}int r(){return index_r;}int c(){return index_c;}int src_r() {return _src_r;}int src_c() {return _src_c;}void* unit() {return _unit;}
private:UNIT_TYPE _unit_type;STATUS _status;int index_r, index_c;int _src_r = -1, _src_c = -1;void* _unit = nullptr;
};
#endif // MAPSQUARE_H
嗯,基本是直接cv過來的,enum都沒改,
畢竟要改的話太麻煩了。
這里保留了我們需要用的,
_unit_type,即地格上面有什么,
無、陣營1(這里就是起點)、陣營2(這里就是終點)。
_status,即地格的狀態,
不可達![]() 、空
、空![]() 、可抵達
、可抵達 ![]() 、可攻擊
、可攻擊![]() (這里用來表示DFS找到的路徑)。
(這里用來表示DFS找到的路徑)。
r和c,表示地格在地圖中的坐標。
_src_r、_src_c、_unit,這里不用管。
mapsquare.cpp
#include "mapsquare.h"MapSquare::MapSquare(QWidget *parent): QLabel(parent) {int w = Pixmaps::getInstance()->map_width,h = Pixmaps::getInstance()->map_height;setGeometry(-w, -h, w, h);setStatus(STATUS_EMPTY);_unit_type = UNIT_TYPE_EMPTY;
}void MapSquare::setStatus(STATUS new_status, bool update_pixmap){_status = new_status;if(update_pixmap){if(_status == STATUS_UNCHECKABLE){setPixmap(Pixmaps::getInstance()->map0);} else if(_status == STATUS_EMPTY){setPixmap(Pixmaps::getInstance()->map1);} else if(_status == STATUS_MOVE){setPixmap(Pixmaps::getInstance()->map2);} else if(_status == STATUS_ATTACK){setPixmap(Pixmaps::getInstance()->map3);}}
}void MapSquare::setUnitType(UNIT_TYPE new_type) {_unit_type = new_type;
}void MapSquare::setIndex(int r, int c) {index_r = r;index_c = c;
}void MapSquare::setSrc(int r, int c) {_src_r = r;_src_c = c;
}void MapSquare::setUnit(void *unit) {_unit = unit;
}
都是簡單的賦值,應該不必多說吧。
dfsthread
用于DFS的線程,本篇的核心。
dfsthread.h
#ifndef DFSTHREAD_H
#define DFSTHREAD_H#include "mapsquare.h"
#include <QObject>
#include <QWidget>
#include <QThread>
#include <QWaitCondition>
#include <QMutex>class DfsThread : public QThread
{Q_OBJECT
public:explicit DfsThread(QWidget *parent = nullptr);void init(QVector<QVector<MapSquare*>>& _map, int _r, int _c, int _max_step);public:void pause();void resume();void oneStep(bool);protected:void run() override;bool dfs(int r, int c, int step, int max_step);signals:void updateSquare(int r, int c, MapSquare::STATUS status);void dstNotFound();private:QVector<QVector<MapSquare*>>* map; // 這里要不斷更改指向, 所以不能用引用QVector<QVector<bool>> visited;int src_r, src_c, max_step;int r_map, c_map;static const int dx[4];static const int dy[4];
private:bool one_step = false;bool paused = false;QMutex mutex;QWaitCondition pauseCond;
};#endif // DFSTHREAD_H
講講成員變量:
map用來存地圖。
visited用來標記當前走過的路徑。
src_r, src_c 就是起點坐標。
max_step 是最多走多少步。
r_map, c_map 是地圖行、列的數量。
dx,dy 用于控制方向。
嗯,后面幾個是用來控制線程的,
為了達到暫停、單步執行的效果,
用到了鎖和條件變量。
dfsthread.cpp
run dfs
void DfsThread::run()
{{QMutexLocker locker(&mutex);while (paused) {pauseCond.wait(&mutex);}}if (!map) return;if (false == dfs(src_r, src_c, 0, max_step)){emit dstNotFound();}
}
先檢查被暫停沒有,然后開始DFS。
bool DfsThread::dfs(int r, int c, int step, int max_step)
{{QMutexLocker locker(&mutex);while (paused) {pauseCond.wait(&mutex);}}
同樣,每次DFS前檢查一下被暫停沒有。
if (step > max_step) return false;if (r < 0 || r >= r_map || c < 0 || c >= c_map) return false;if (visited[r][c]) return false;const QVector<QVector<MapSquare*>>& mapRef = *map;if (mapRef[r][c]->status() == MapSquare::STATUS_UNCHECKABLE) return false;visited[r][c] = true; // 標記為已訪問
對當前地格是否可走進行判定,
如果可走,在visited中標記。
接下來的地格將不包括:![]()
// 檢查是否找到目標 (不同陣營)if (mapRef[r][c]->unit_type() != MapSquare::UNIT_TYPE_EMPTY &&mapRef[r][c]->unit_type() != mapRef[src_r][src_c]->unit_type()) {// 找到目標!emit updateSquare(r, c, MapSquare::STATUS_ATTACK);mapRef[r][c]->setSrc(src_r, src_c);QThread::msleep(300);return true; // 成功找到路徑}
如果找到目標,
發出信號將地格 ![]() 標記為STATUS_ATTACK
標記為STATUS_ATTACK ![]() ,
,
并開始返回。
if(mapRef[r][c]->status() != MapSquare::STATUS_MOVE){emit updateSquare(r, c, MapSquare::STATUS_MOVE);mapRef[r][c]->setSrc(src_r, src_c);if(one_step) {pause();} else {QThread::msleep(50); // 暫停一段時間}}
如果沒找到,
發出信號將地格 ![]() 標記為STATUS_MOVE
標記為STATUS_MOVE ![]() ,
,
并判斷是否是單步執行,
如果是,直接暫停線程,
如果不是,那么休眠50ms,
展現出地格是一步步被改變的,
而不是一下就dfs完了。
for (int i = 0; i < 4; i++) {int x = dx[i] + r;int y = dy[i] + c;if (dfs(x, y, step + 1, max_step)) {// 到了這里, 說明找到了// 那么接著修改地格狀態, 并返回 trueemit updateSquare(r, c, MapSquare::STATUS_ATTACK);QThread::msleep(300);return true;}}// 恢復狀態visited[r][c] = 0;return false;
}
其他
#include "dfsthread.h"
#include <QDebug>const int DfsThread::dx[4] = {0, 0, 1, -1};
const int DfsThread::dy[4] = {1, -1, 0, 0};DfsThread::DfsThread(QWidget *parent): QThread(parent), map(nullptr)
{
}void DfsThread::init(QVector<QVector<MapSquare*>>& _map, int _r, int _c, int _max_step){map = &_map;src_r = _r;src_c = _c;max_step = _max_step;r_map = _map.size();c_map = _map[0].size();// 這里每次都得重新設置一下visited = QVector<QVector<bool>>(r_map, QVector<bool>(c_map, false));
}void DfsThread::pause(){QMutexLocker locker(&mutex);paused = true;
}void DfsThread::resume(){QMutexLocker locker(&mutex);paused = false;pauseCond.wakeAll();
}void DfsThread::oneStep(bool o){one_step = o;
}
我試了一下,
似乎不加鎖和條件變量也行,
不過為了安全還是加上吧。
Widget
UI界面史中史,設計得就是依托。
完整的可以去我的代碼倉庫看,
這里就不列出來了。
Unit
struct Unit : public QPushButton{Unit(QWidget *parent=nullptr): QPushButton(parent){}int r = -1, c = -1;int move_range = 5;MapSquare::UNIT_TYPE unit_type;
};
這個類本來單獨在一個文件里的,被我合過來了。
關于這個類,我寫了幾個函數:
void initUnit(Unit* unit, MapSquare::UNIT_TYPE unit_type);
void moveUnit(Unit* unit, int r, int c);
void connectUnit(Unit* &unit);
一個是初始化,
一個是移動,
一個是連接信號和槽(繼承自按鈕,可點擊)。
initUnit :
void Widget::initUnit(Widget::Unit *unit, MapSquare::UNIT_TYPE unit_type)
{if(unit_type == MapSquare::UNIT_TYPE_PLAYER1)unit->setIcon(Pixmaps::getInstance()->map_src);else if(unit_type == MapSquare::UNIT_TYPE_PLAYER2)unit->setIcon(Pixmaps::getInstance()->map_dst);elseqDebug() << "初始化單位為未定義類型";unit->setIconSize(QSize(80, 80));unit->setStyleSheet("border : transparent;");unit->unit_type = unit_type;
}
傳入一個Unit*,和單位類型,
就能初始化一個單位。
moveUnit
void Widget::moveUnit(Widget::Unit *unit, int r, int c)
{if(unit->r != -1 && unit->c != -1) {map[unit->r][unit->c]->setUnitType(MapSquare::UNIT_TYPE_EMPTY);map[unit->r][unit->c]->setUnit();}unit->setGeometry(map[r][c]->geometry());unit->r = r;unit->c = c;unit->raise();map[r][c]->setUnitType(unit->unit_type);map[r][c]->setUnit(unit);
}
首先得判斷是否剛初始化,
如果已經設置過坐標,
那么得先把原地格的狀態清空,
(感覺還能封裝,地格可以提供一個狀態清空函數)
然后才能移動單位,
并重新設置相關屬性。
connectUnit
void Widget::connectUnit(Widget::Unit* &unit)
{connect(unit, &QPushButton::clicked, this, [&](){qDebug() << "unit clicked ...";if(dfsThreadIsRunning()) return;MapSquare::STATUS _status = map[unit->r][unit->c]->status();if(_status == MapSquare::STATUS_EMPTY) {resetMap(); // 重置地圖dfsThread.init(map, unit->r, unit->c, unit->move_range); // 每次都要初始化dfsThread.start(); // 不能用run, 會阻塞主線程} else {resetMap(); // 重置地圖}});
}
單位被點擊,
如果當前地格狀態為空,
則開始DFS。
如果地格狀態為其他的,
暫時不做處理。
其他
connect(&dfsThread, &DfsThread::updateSquare, this, [this](int r, int c, MapSquare::STATUS status) {qDebug() << "子線程來信號了!" << status;map[r][c]->setStatus(status);
});
這個放在構造函數里,
子線程發來信號,
主線程進行地格的狀態更新。

希望本篇文章對你有所幫助!并激發你進一步探索編程的興趣!
本人僅是個C語言初學者,如果你有任何疑問或建議,歡迎隨時留言討論!讓我們一起學習,共同進步!



)

Transformers without Normalization)
)












