0、快速訪問
論文閱讀筆記:Denoising Diffusion Implicit Models (1)
論文閱讀筆記:Denoising Diffusion Implicit Models (2)
論文閱讀筆記:Denoising Diffusion Implicit Models (3)
論文閱讀筆記:Denoising Diffusion Implicit Models (4)
論文閱讀筆記:Denoising Diffusion Implicit Models (5)
5、接上文論文閱讀筆記:Denoising Diffusion Implicit Models (4)
這里使用中的 σ t \sigma_t σt?是可以自己定義的量。有兩種特殊的情況:
1、 σ t 2 = 0 \sigma_t^2=0 σt2?=0:此時,
x t ? 1 x_{t-1} xt?1?滿足公式(3)
x t ? 1 = α t ? 1 ? x t ? 1 ? α t ? z t α t + 1 ? α t ? 1 ? σ t 2 ? z t + σ t 2 ? t = α t ? 1 ? x 0 + 1 ? α t ? 1 ? z t \begin{equation} \begin{split} x_{t-1}&=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{1-\alpha_{t-1}-\sigma_t^2}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot x_0+\sqrt{1-\alpha_{t-1}}\cdot z_t \\ \end{split} \end{equation} xt?1??=αt?1???αt??xt??1?αt???zt??+1?αt?1??σt2???zt?+σt2??t?=αt?1???x0?+1?αt?1???zt????
x t ? n x_{t-n} xt?n?滿足
x t ? n = α t ? n ? x t ? 1 ? α t ? z t α t + 1 ? α t ? n ? σ t 2 ? z t + σ t 2 ? t = α t ? n ? x 0 + 1 ? α t ? n ? z t \begin{equation} \begin{split} x_{t-n}&=\sqrt{\alpha_{t-n}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{1-\alpha_{t-n}-\sigma_t^2}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-n}}\cdot x_0+\sqrt{1-\alpha_{t-n}}\cdot z_t \\ \end{split} \end{equation} xt?n??=αt?n???αt??xt??1?αt???zt??+1?αt?n??σt2???zt?+σt2??t?=αt?n???x0?+1?αt?n???zt????
可以看出,此時, x t ? 1 x_{t-1} xt?1?和 x t ? n x_{t-n} xt?n?退化成上文論文閱讀筆記:Denoising Diffusion Implicit Models (2)中的Lemma 1.
2、 σ t 2 = 1 ? α t ? 1 1 ? α t ? ( 1 ? α t α t ? 1 ) \sigma_t^2=\frac{1-\alpha_{t-1}}{1-\alpha_t}\cdot (1-\frac{\alpha_t}{\alpha_{t-1}}) σt2?=1?αt?1?αt?1???(1?αt?1?αt??):此時, x t ? 1 x_{t-1} xt?1?滿足公式(4)
x t ? 1 = α t ? 1 ? x t ? 1 ? α t ? z t α t + 1 ? α t ? 1 ? σ t 2 ? z t + σ t 2 ? t = α t ? 1 ? x t ? 1 ? α t ? z t α t + 1 ? α t ? 1 ? 1 ? α t ? 1 1 ? α t ? ( 1 ? α t α t ? 1 ) ? z t + σ t 2 ? t = α t ? 1 ? x t ? 1 ? α t ? z t α t + ( 1 ? α t ? 1 ) ( 1 ? 1 1 ? α t ? α t ? 1 ? α t α t ? 1 ) ? z t + σ t 2 ? t = α t ? 1 ? x t ? 1 ? α t ? z t α t + ( 1 ? α t ? 1 ) α t ? 1 ? α t ? 1 ? α t ? α t ? 1 + α t α t ? 1 ? ( 1 ? α t ) ? z t + σ t 2 ? t = α t ? 1 ? x t ? 1 ? α t ? z t α t + ( 1 ? α t ? 1 ) ? α t ? 1 ? α t + α t α t ? 1 ? ( 1 ? α t ) ? z t + σ t 2 ? t = α t ? 1 ? x t ? 1 ? α t ? z t α t + ( 1 ? α t ? 1 ) α t α t ? 1 ? ( 1 ? α t ) ? z t + σ t 2 ? t = α t ? 1 ? x t α t ? α t ? 1 1 ? α t ? z t α t + ( 1 ? α t ? 1 ) α t α t ? 1 ? ( 1 ? α t ) ? z t + σ t 2 ? t = α t ? 1 ? x t α t ? ( α t ? 1 1 ? α t ? α t ? 1 1 ? α t ? ( 1 ? α t ? 1 ) ? α t ? α t α t ? α t ? 1 ? ( 1 ? α t ) ) ? z t + σ t 2 ? t = α t ? 1 ? x t α t ? ( α t ? 1 1 ? α t ? α t ? 1 1 ? α t ? ( 1 ? α t ? 1 ) ? α t ? α t α t ? α t ? 1 ? ( 1 ? α t ) ) ? z t + σ t 2 ? t = α t ? 1 ? x t α t ? ( α t ? 1 ? ( 1 ? α t ) ? ( 1 ? α t ? 1 ) ? α t α t ? α t ? 1 ? ( 1 ? α t ) ) ? z t + σ t 2 ? t = α t ? 1 ? x t α t ? ( α t ? 1 ? α t ? α t ? 1 ? α t + α t ? α t ? 1 α t ? α t ? 1 ? ( 1 ? α t ) ) ? z t = α t ? 1 ? x t α t ? ( α t ? 1 ? α t α t ? α t ? 1 ? ( 1 ? α t ) ) ? z t + σ t 2 ? t = α t ? 1 ? x t α t ? ( α t ? 1 ? ( α t ? 1 ? α t ) α t ? 1 ? α t ? ( 1 ? α t ) ) ? z t + σ t 2 ? t = α t ? 1 α t ( x t ? α t ? 1 ? α t α t ? 1 ? 1 ? α t ) + σ t 2 ? t = α t ? 1 α t ( x t ? 1 1 ? α t ? ( 1 ? α t α t ? 1 ) ) ? z t + σ t 2 ? t = 1 α t ( x t ? β t 1 ? α ˉ t ) ? z t + σ t 2 ? t (換成 D D P M 中的符號) \begin{equation} \begin{split} x_{t-1}&=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{1-\alpha_{t-1}-\sigma_t^2}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{1-\alpha_{t-1}-\frac{1-\alpha_{t-1}}{1-\alpha_t}\cdot (1-\frac{\alpha_t}{\alpha_{t-1}})}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{(1-\alpha_{t-1})(1-\frac{1}{1-\alpha_t}\cdot \frac{\alpha_{t-1}-\alpha_t}{\alpha_{t-1}})}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{(1-\alpha_{t-1})\frac{\alpha_{t-1}-\alpha_{t-1}\cdot \alpha_{t}-\alpha_{t-1}+\alpha_t}{\alpha_{t-1}\cdot(1-\alpha_{t})}}\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+\sqrt{(1-\alpha_{t-1})\frac{-\alpha_{t-1}\cdot \alpha_{t}+\alpha_t}{\alpha_{t-1}\cdot(1-\alpha_{t})}}\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t-{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+(1-\alpha_{t-1})\sqrt{\frac{\alpha_t}{\alpha_{t-1}\cdot(1-\alpha_{t})}}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}}-\frac{\sqrt{\alpha_{t-1}}{\sqrt{1-\alpha_t}\cdot z_t}}{\sqrt{\alpha_t}}+(1-\alpha_{t-1})\sqrt{\frac{\alpha_t}{\alpha_{t-1}\cdot(1-\alpha_{t})}}\cdot z_t + \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}} -\Bigg(\frac{\sqrt{\alpha_{t-1}}{\sqrt{1-\alpha_t}}\cdot\sqrt{\alpha_{t-1}}{\sqrt{1-\alpha_t}}-(1-\alpha_{t-1})\cdot\sqrt{\alpha_t}\cdot\sqrt{\alpha_t}}{\sqrt{\alpha_t}\cdot \sqrt{\alpha_{t-1}\cdot(1-\alpha_t)}} \Bigg)\cdot z_t+ \sigma_t^2 \epsilon_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}} -\Bigg(\frac{\sqrt{\alpha_{t-1}}{\sqrt{1-\alpha_t}}\cdot\sqrt{\alpha_{t-1}}{\sqrt{1-\alpha_t}}-(1-\alpha_{t-1})\cdot\sqrt{\alpha_t}\cdot\sqrt{\alpha_t}}{\sqrt{\alpha_t}\cdot \sqrt{\alpha_{t-1}\cdot(1-\alpha_t)}}\Bigg)\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}} -\Bigg(\frac{\alpha_{t-1}\cdot({1-\alpha_t)}-(1-\alpha_{t-1})\cdot \alpha_t}{\sqrt{\alpha_t}\cdot \sqrt{\alpha_{t-1}\cdot(1-\alpha_t)}} \Bigg)\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}} -\Bigg(\frac{\alpha_{t-1}-\bcancel{\alpha_t\cdot \alpha_{t-1}}-\alpha_t+\bcancel{\alpha_t\cdot \alpha_{t-1}}}{\sqrt{\alpha_t}\cdot \sqrt{\alpha_{t-1}\cdot(1-\alpha_t)}} \Bigg)\cdot z_t \\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}} -\Bigg(\frac{\alpha_{t-1}-\alpha_t}{\sqrt{\alpha_t}\cdot \sqrt{\alpha_{t-1}\cdot(1-\alpha_t)}} \Bigg)\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\sqrt{\alpha_{t-1}}\cdot\frac{x_t}{\sqrt{\alpha_t}} -\Bigg(\frac{\sqrt{\alpha_{t-1}}\cdot (\alpha_{t-1}-\alpha_t)}{\alpha_{t-1}\cdot\sqrt{\alpha_t}\cdot \sqrt{(1-\alpha_t)}} \Bigg)\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\frac{\sqrt{\alpha_{t-1}}}{\sqrt{\alpha_{t}}}\Bigg(x_t-\frac{\alpha_{t-1}-\alpha_t}{\alpha_{t-1}\cdot\ \sqrt{1-\alpha_t}}\Bigg) + \sigma_t^2 \epsilon_t\\ &=\frac{\sqrt{\alpha_{t-1}}}{\sqrt{\alpha_{t}}}\Bigg(x_t-\frac{1}{\ \sqrt{1-\alpha_t}}\cdot (1-\frac{\alpha_t}{\alpha_{t-1}})\Bigg)\cdot z_t + \sigma_t^2 \epsilon_t\\ &=\frac{1}{\sqrt{\alpha_{t}}}\Bigg(x_t-\frac{\beta_t}{\ \sqrt{1-\bar\alpha_t}}\Bigg)\cdot z_t + \sigma_t^2 \epsilon_t(換成DDPM中的符號)\\ \end{split} \end{equation} xt?1??=αt?1???αt??xt??1?αt???zt??+1?αt?1??σt2???zt?+σt2??t?=αt?1???αt??xt??1?αt???zt??+1?αt?1??1?αt?1?αt?1???(1?αt?1?αt??)??zt?+σt2??t?=αt?1???αt??xt??1?αt???zt??+(1?αt?1?)(1?1?αt?1??αt?1?αt?1??αt??)??zt?+σt2??t?=αt?1???αt??xt??1?αt???zt??+(1?αt?1?)αt?1??(1?αt?)αt?1??αt?1??αt??αt?1?+αt????zt?+σt2??t?=αt?1???αt??xt??1?αt???zt??+(1?αt?1?)αt?1??(1?αt?)?αt?1??αt?+αt????zt?+σt2??t?=αt?1???αt??xt??1?αt???zt??+(1?αt?1?)αt?1??(1?αt?)αt????zt?+σt2??t?=αt?1???αt??xt???αt??αt?1??1?αt???zt??+(1?αt?1?)αt?1??(1?αt?)αt????zt?+σt2??t?=αt?1???αt??xt???(αt???αt?1??(1?αt?)?αt?1??1?αt???αt?1??1?αt???(1?αt?1?)?αt???αt???)?zt?+σt2??t?=αt?1???αt??xt???(αt???αt?1??(1?αt?)?αt?1??1?αt???αt?1??1?αt???(1?αt?1?)?αt???αt???)?zt?+σt2??t?=αt?1???αt??xt???(αt???αt?1??(1?αt?)?αt?1??(1?αt?)?(1?αt?1?)?αt??)?zt?+σt2??t?=αt?1???αt??xt???(αt???αt?1??(1?αt?)?αt?1??αt??αt?1? ??αt?+αt??αt?1? ??)?zt?=αt?1???αt??xt???(αt???αt?1??(1?αt?)?αt?1??αt??)?zt?+σt2??t?=αt?1???αt??xt???(αt?1??αt???(1?αt?)?αt?1???(αt?1??αt?)?)?zt?+σt2??t?=αt??αt?1???(xt??αt?1???1?αt??αt?1??αt??)+σt2??t?=αt??αt?1???(xt???1?αt??1??(1?αt?1?αt??))?zt?+σt2??t?=αt??1?(xt???1?αˉt??βt??)?zt?+σt2??t?(換成DDPM中的符號)???
可以看出,此時,DDIM退化成了DDPM。
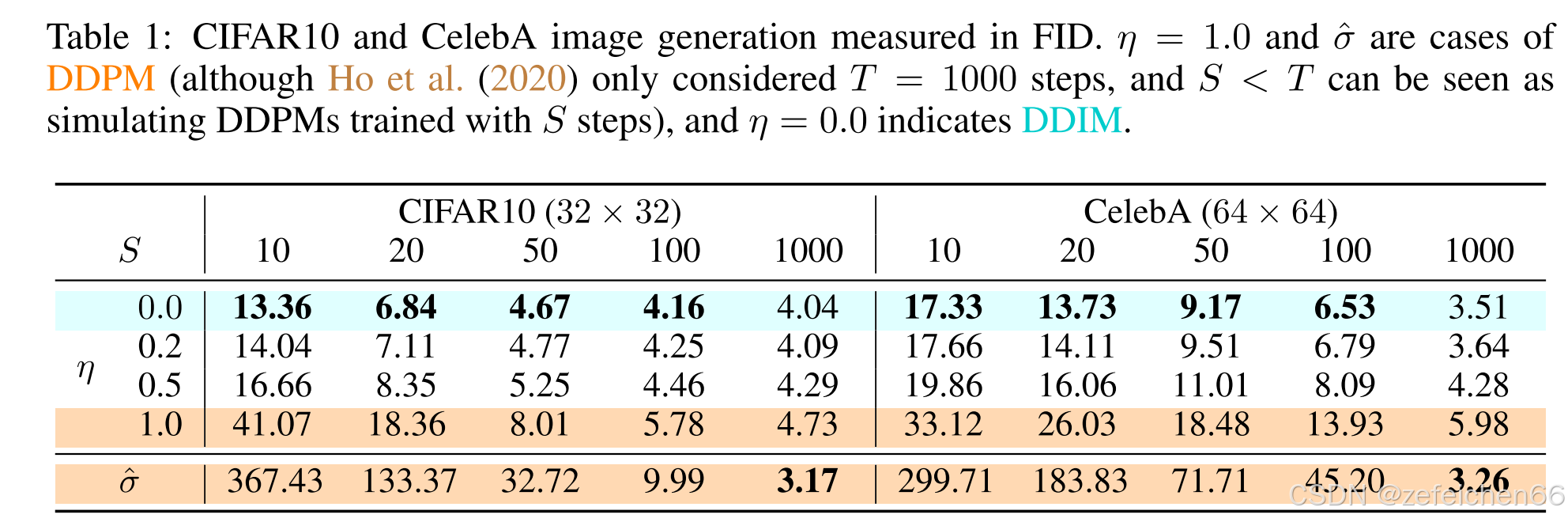
論文討論了 σ t 2 \sigma_t^2 σt2?選取 η ? 1 ? α t ? 1 1 ? α t ? ( 1 ? α t α t ? 1 ) , η ∈ [ 0 , 1 ] \eta\cdot \frac{1-\alpha_{t-1}}{1-\alpha_t}\cdot (1-\frac{\alpha_t}{\alpha_{t-1}}),\eta\in[0,1] η?1?αt?1?αt?1???(1?αt?1?αt??),η∈[0,1],即在0和DDPM之間變化時。不同 η \eta η以及跳不同步時所對應的表現,如下圖所示。
6、代碼
class DDIMPipeline(DiffusionPipeline):model_cpu_offload_seq = "unet"def __init__(self, unet, scheduler):super().__init__()# make sure scheduler can always be converted to DDIMscheduler = DDIMScheduler.from_config(scheduler.config)self.register_modules(unet=unet, scheduler=scheduler)@torch.no_grad()def __call__(self,batch_size: int = 1,generator: Optional[Union[torch.Generator, List[torch.Generator]]] = None,eta: float = 0.0,num_inference_steps: int = 50,use_clipped_model_output: Optional[bool] = None,output_type: Optional[str] = "pil",return_dict: bool = True,) -> Union[ImagePipelineOutput, Tuple]:# Sample gaussian noise to begin loopif isinstance(self.unet.config.sample_size, int):image_shape = (batch_size,self.unet.config.in_channels,self.unet.config.sample_size,self.unet.config.sample_size,)else:image_shape = (batch_size, self.unet.config.in_channels, *self.unet.config.sample_size)if isinstance(generator, list) and len(generator) != batch_size:raise ValueError(f"You have passed a list of generators of length {len(generator)}, but requested an effective batch"f" size of {batch_size}. Make sure the batch size matches the length of the generators.")# 隨即生成噪音image = randn_tensor(image_shape, generator=generator, device=self._execution_device, dtype=self.unet.dtype)# 設置步數間隔。例如num_inference_steps = 50,然而總步長為1000,那么就是每次跳20步,例如在當前時刻, timestep=980, prev_timestep=960self.scheduler.set_timesteps(num_inference_steps)for t in self.progress_bar(self.scheduler.timesteps):# 1. 預測出timestep=980時刻對應噪音model_output = self.unet(image, t).sample# 2. 調用scheduler的方法step,執行公式()得到prev_timestep=960時刻的圖像image = self.scheduler.step(model_output, t, image, eta=eta, use_clipped_model_output=use_clipped_model_output, generator=generator).prev_sampleimage = (image / 2 + 0.5).clamp(0, 1)image = image.cpu().permute(0, 2, 3, 1).numpy()if output_type == "pil":image = self.numpy_to_pil(image)if not return_dict:return (image,)return ImagePipelineOutput(images=image)class DDIMScheduler(SchedulerMixin, ConfigMixin):_compatibles = [e.name for e in KarrasDiffusionSchedulers]order = 1@register_to_configdef __init__(self,num_train_timesteps: int = 1000,beta_start: float = 0.0001,beta_end: float = 0.02,beta_schedule: str = "linear",trained_betas: Optional[Union[np.ndarray, List[float]]] = None,clip_sample: bool = True,set_alpha_to_one: bool = True,steps_offset: int = 0,prediction_type: str = "epsilon",thresholding: bool = False,dynamic_thresholding_ratio: float = 0.995,clip_sample_range: float = 1.0,sample_max_value: float = 1.0,timestep_spacing: str = "leading",rescale_betas_zero_snr: bool = False,):if trained_betas is not None:self.betas = torch.tensor(trained_betas, dtype=torch.float32)elif beta_schedule == "linear":self.betas = torch.linspace(beta_start, beta_end, num_train_timesteps, dtype=torch.float32)elif beta_schedule == "scaled_linear":# this schedule is very specific to the latent diffusion model.self.betas = torch.linspace(beta_start**0.5, beta_end**0.5, num_train_timesteps, dtype=torch.float32) ** 2elif beta_schedule == "squaredcos_cap_v2":# Glide cosine scheduleself.betas = betas_for_alpha_bar(num_train_timesteps)else:raise NotImplementedError(f"{beta_schedule} is not implemented for {self.__class__}")# Rescale for zero SNRif rescale_betas_zero_snr:self.betas = rescale_zero_terminal_snr(self.betas)self.alphas = 1.0 - self.betasself.alphas_cumprod = torch.cumprod(self.alphas, dim=0)# At every step in ddim, we are looking into the previous alphas_cumprod# For the final step, there is no previous alphas_cumprod because we are already at 0# `set_alpha_to_one` decides whether we set this parameter simply to one or# whether we use the final alpha of the "non-previous" one.self.final_alpha_cumprod = torch.tensor(1.0) if set_alpha_to_one else self.alphas_cumprod[0]# standard deviation of the initial noise distributionself.init_noise_sigma = 1.0# setable valuesself.num_inference_steps = Noneself.timesteps = torch.from_numpy(np.arange(0, num_train_timesteps)[::-1].copy().astype(np.int64))def scale_model_input(self, sample: torch.Tensor, timestep: Optional[int] = None) -> torch.Tensor:"""Ensures interchangeability with schedulers that need to scale the denoising model input depending on thecurrent timestep.Args:sample (`torch.Tensor`):The input sample.timestep (`int`, *optional*):The current timestep in the diffusion chain.Returns:`torch.Tensor`:A scaled input sample."""return sampledef _get_variance(self, timestep, prev_timestep):alpha_prod_t = self.alphas_cumprod[timestep]alpha_prod_t_prev = self.alphas_cumprod[prev_timestep] if prev_timestep >= 0 else self.final_alpha_cumprodbeta_prod_t = 1 - alpha_prod_tbeta_prod_t_prev = 1 - alpha_prod_t_prevvariance = (beta_prod_t_prev / beta_prod_t) * (1 - alpha_prod_t / alpha_prod_t_prev)return variance# Copied from diffusers.schedulers.scheduling_ddpm.DDPMScheduler._threshold_sampledef _threshold_sample(self, sample: torch.Tensor) -> torch.Tensor:""""Dynamic thresholding: At each sampling step we set s to a certain percentile absolute pixel value in xt0 (theprediction of x_0 at timestep t), and if s > 1, then we threshold xt0 to the range [-s, s] and then divide bys. Dynamic thresholding pushes saturated pixels (those near -1 and 1) inwards, thereby actively preventingpixels from saturation at each step. We find that dynamic thresholding results in significantly betterphotorealism as well as better image-text alignment, especially when using very large guidance weights."https://arxiv.org/abs/2205.11487"""dtype = sample.dtypebatch_size, channels, *remaining_dims = sample.shapeif dtype not in (torch.float32, torch.float64):sample = sample.float() # upcast for quantile calculation, and clamp not implemented for cpu half# Flatten sample for doing quantile calculation along each imagesample = sample.reshape(batch_size, channels * np.prod(remaining_dims))abs_sample = sample.abs() # "a certain percentile absolute pixel value"s = torch.quantile(abs_sample, self.config.dynamic_thresholding_ratio, dim=1)s = torch.clamp(s, min=1, max=self.config.sample_max_value) # When clamped to min=1, equivalent to standard clipping to [-1, 1]s = s.unsqueeze(1) # (batch_size, 1) because clamp will broadcast along dim=0sample = torch.clamp(sample, -s, s) / s # "we threshold xt0 to the range [-s, s] and then divide by s"sample = sample.reshape(batch_size, channels, *remaining_dims)sample = sample.to(dtype)return sampledef set_timesteps(self, num_inference_steps: int, device: Union[str, torch.device] = None):"""Sets the discrete timesteps used for the diffusion chain (to be run before inference).Args:num_inference_steps (`int`):The number of diffusion steps used when generating samples with a pre-trained model."""if num_inference_steps > self.config.num_train_timesteps:raise ValueError(f"`num_inference_steps`: {num_inference_steps} cannot be larger than `self.config.train_timesteps`:"f" {self.config.num_train_timesteps} as the unet model trained with this scheduler can only handle"f" maximal {self.config.num_train_timesteps} timesteps.")self.num_inference_steps = num_inference_steps# "linspace", "leading", "trailing" corresponds to annotation of Table 2. of https://arxiv.org/abs/2305.08891if self.config.timestep_spacing == "linspace":timesteps = (np.linspace(0, self.config.num_train_timesteps - 1, num_inference_steps).round()[::-1].copy().astype(np.int64))elif self.config.timestep_spacing == "leading":step_ratio = self.config.num_train_timesteps // self.num_inference_steps# creates integer timesteps by multiplying by ratio# casting to int to avoid issues when num_inference_step is power of 3timesteps = (np.arange(0, num_inference_steps) * step_ratio).round()[::-1].copy().astype(np.int64)timesteps += self.config.steps_offsetelif self.config.timestep_spacing == "trailing":step_ratio = self.config.num_train_timesteps / self.num_inference_steps# creates integer timesteps by multiplying by ratio# casting to int to avoid issues when num_inference_step is power of 3timesteps = np.round(np.arange(self.config.num_train_timesteps, 0, -step_ratio)).astype(np.int64)timesteps -= 1else:raise ValueError(f"{self.config.timestep_spacing} is not supported. Please make sure to choose one of 'leading' or 'trailing'.")self.timesteps = torch.from_numpy(timesteps).to(device)def step(self,model_output: torch.Tensor,timestep: int,sample: torch.Tensor,eta: float = 0.0,use_clipped_model_output: bool = False,generator=None,variance_noise: Optional[torch.Tensor] = None,return_dict: bool = True,) -> Union[DDIMSchedulerOutput, Tuple]:if self.num_inference_steps is None:raise ValueError("Number of inference steps is 'None', you need to run 'set_timesteps' after creating the scheduler")# 1. get previous step value (=t-1);# timestep=980,self.config.num_train_timesteps=1000, self.num_inference_steps=50# prev_timestep = 960,步數的跳躍間隔為20prev_timestep = timestep - self.config.num_train_timesteps // self.num_inference_steps# 2. compute alphas, betasalpha_prod_t = self.alphas_cumprod[timestep]alpha_prod_t_prev = self.alphas_cumprod[prev_timestep] if prev_timestep >= 0 else self.final_alpha_cumprodbeta_prod_t = 1 - alpha_prod_t# 3. compute predicted original sample from predicted noise also called# "predicted x_0" of formula (12) from https://arxiv.org/pdf/2010.02502.pdfif self.config.prediction_type == "epsilon":pred_original_sample = (sample - beta_prod_t ** (0.5) * model_output) / alpha_prod_t ** (0.5)pred_epsilon = model_outputelif self.config.prediction_type == "sample":pred_original_sample = model_outputpred_epsilon = (sample - alpha_prod_t ** (0.5) * pred_original_sample) / beta_prod_t ** (0.5)elif self.config.prediction_type == "v_prediction":pred_original_sample = (alpha_prod_t**0.5) * sample - (beta_prod_t**0.5) * model_outputpred_epsilon = (alpha_prod_t**0.5) * model_output + (beta_prod_t**0.5) * sampleelse:raise ValueError(f"prediction_type given as {self.config.prediction_type} must be one of `epsilon`, `sample`, or"" `v_prediction`")# 4. Clip or threshold "predicted x_0"if self.config.thresholding:pred_original_sample = self._threshold_sample(pred_original_sample)elif self.config.clip_sample:pred_original_sample = pred_original_sample.clamp(-self.config.clip_sample_range, self.config.clip_sample_range)# 5. compute variance: "sigma_t(η)" -> see formula (16)# σ_t = sqrt((1 ? α_t?1)/(1 ? α_t)) * sqrt(1 ? α_t/α_t?1)variance = self._get_variance(timestep, prev_timestep)std_dev_t = eta * variance ** (0.5)if use_clipped_model_output:# the pred_epsilon is always re-derived from the clipped x_0 in Glidepred_epsilon = (sample - alpha_prod_t ** (0.5) * pred_original_sample) / beta_prod_t ** (0.5)# 6. compute "direction pointing to x_t" of formula (12) from https://arxiv.org/pdf/2010.02502.pdfpred_sample_direction = (1 - alpha_prod_t_prev - std_dev_t**2) ** (0.5) * pred_epsilon# 7. compute x_t without "random noise" of formula (12) from https://arxiv.org/pdf/2010.02502.pdfprev_sample = alpha_prod_t_prev ** (0.5) * pred_original_sample + pred_sample_directionif eta > 0:if variance_noise is not None and generator is not None:raise ValueError("Cannot pass both generator and variance_noise. Please make sure that either `generator` or"" `variance_noise` stays `None`.")if variance_noise is None:variance_noise = randn_tensor(model_output.shape, generator=generator, device=model_output.device, dtype=model_output.dtype)variance = std_dev_t * variance_noiseprev_sample = prev_sample + varianceif not return_dict:return (prev_sample,pred_original_sample,)return DDIMSchedulerOutput(prev_sample=prev_sample, pred_original_sample=pred_original_sample)# Copied from diffusers.schedulers.scheduling_ddpm.DDPMScheduler.add_noisedef add_noise(self,original_samples: torch.Tensor,noise: torch.Tensor,timesteps: torch.IntTensor,) -> torch.Tensor:# Make sure alphas_cumprod and timestep have same device and dtype as original_samples# Move the self.alphas_cumprod to device to avoid redundant CPU to GPU data movement# for the subsequent add_noise callsself.alphas_cumprod = self.alphas_cumprod.to(device=original_samples.device)alphas_cumprod = self.alphas_cumprod.to(dtype=original_samples.dtype)timesteps = timesteps.to(original_samples.device)sqrt_alpha_prod = alphas_cumprod[timesteps] ** 0.5sqrt_alpha_prod = sqrt_alpha_prod.flatten()while len(sqrt_alpha_prod.shape) < len(original_samples.shape):sqrt_alpha_prod = sqrt_alpha_prod.unsqueeze(-1)sqrt_one_minus_alpha_prod = (1 - alphas_cumprod[timesteps]) ** 0.5sqrt_one_minus_alpha_prod = sqrt_one_minus_alpha_prod.flatten()while len(sqrt_one_minus_alpha_prod.shape) < len(original_samples.shape):sqrt_one_minus_alpha_prod = sqrt_one_minus_alpha_prod.unsqueeze(-1)noisy_samples = sqrt_alpha_prod * original_samples + sqrt_one_minus_alpha_prod * noisereturn noisy_samples# Copied from diffusers.schedulers.scheduling_ddpm.DDPMScheduler.get_velocitydef get_velocity(self, sample: torch.Tensor, noise: torch.Tensor, timesteps: torch.IntTensor) -> torch.Tensor:# Make sure alphas_cumprod and timestep have same device and dtype as sampleself.alphas_cumprod = self.alphas_cumprod.to(device=sample.device)alphas_cumprod = self.alphas_cumprod.to(dtype=sample.dtype)timesteps = timesteps.to(sample.device)sqrt_alpha_prod = alphas_cumprod[timesteps] ** 0.5sqrt_alpha_prod = sqrt_alpha_prod.flatten()while len(sqrt_alpha_prod.shape) < len(sample.shape):sqrt_alpha_prod = sqrt_alpha_prod.unsqueeze(-1)sqrt_one_minus_alpha_prod = (1 - alphas_cumprod[timesteps]) ** 0.5sqrt_one_minus_alpha_prod = sqrt_one_minus_alpha_prod.flatten()while len(sqrt_one_minus_alpha_prod.shape) < len(sample.shape):sqrt_one_minus_alpha_prod = sqrt_one_minus_alpha_prod.unsqueeze(-1)velocity = sqrt_alpha_prod * noise - sqrt_one_minus_alpha_prod * samplereturn velocitydef __len__(self):return self.config.num_train_timesteps


_csdn)
)



![洛谷題單3-P1035 [NOIP 2002 普及組] 級數求和-python-流程圖重構](http://pic.xiahunao.cn/洛谷題單3-P1035 [NOIP 2002 普及組] 級數求和-python-流程圖重構)
:3D機房大屏全景解析)


)


Self-Attention(自注意力機制))




MySQL主從同步原理深度剖析)