快速處理和有效利用手與物體交互過程中產生的動態觸覺信號(例如觸摸和抓握)對于觸覺探索和靈巧的物體操作至關重要。將電子皮膚(e-skins)推進到模仿自然觸覺的水平,是恢復截肢者和癱瘓患者喪失的功能的可行解決方案,并實現機器人與人類的安全物理交互以及物體操作的靈巧性。
當前的電子皮膚在與物體交互時會產生觸覺信號幀,隨后使用人工神經網絡 (ANN) 進行處理 。然而,幀編碼的功耗效率低下,因此對實際應用中需要大量傳感器的電子皮膚提出了巨大的挑戰。此外,生成的幀間間隔通常大于 100 ms,這對于靈巧的對象操作來說是不夠的。相比之下,自然的觸覺周圍神經系統能夠以幾毫秒的時間分辨率編碼高度動態的信息。
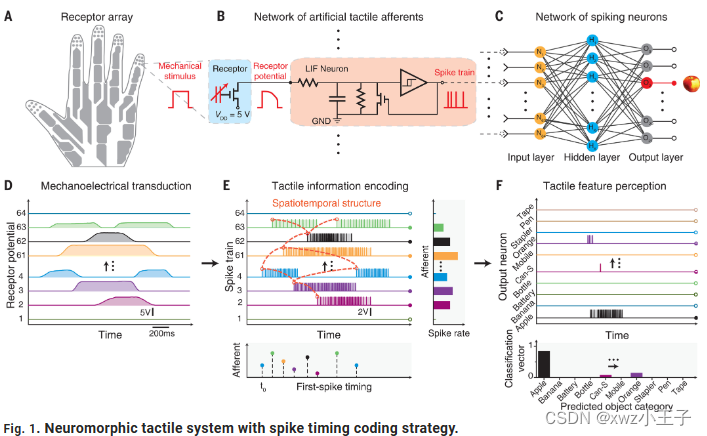
人類觸覺神經系統使用基于稀疏尖峰的根本不同的原理來有效地編碼(包括編碼和解碼)觸覺信息。 人們普遍認為初級感覺神經元使用尖峰速率來傳遞信息,最近的研究表明,觸覺傳入神經集合中第一個尖峰的時間在編碼高度動態的觸覺信息中起著至關重要的作用。
近期Chen等人發表的Science論文研究工作,開發了一種神經形態觸覺人造皮膚,能夠在不同的抓取任務中實現快速、精確的物體區分。通過利用基于尖峰時序的方法來處理觸覺信息,他們能夠在物體分類實驗中提高傳統電子皮膚的性能。此外,人工傳感器允許以毫秒級分辨率對觸覺信息進行編碼,類似于神經系統的性能。這里開發的仿生設備可用于提高假肢和其他機器人系統的性能。
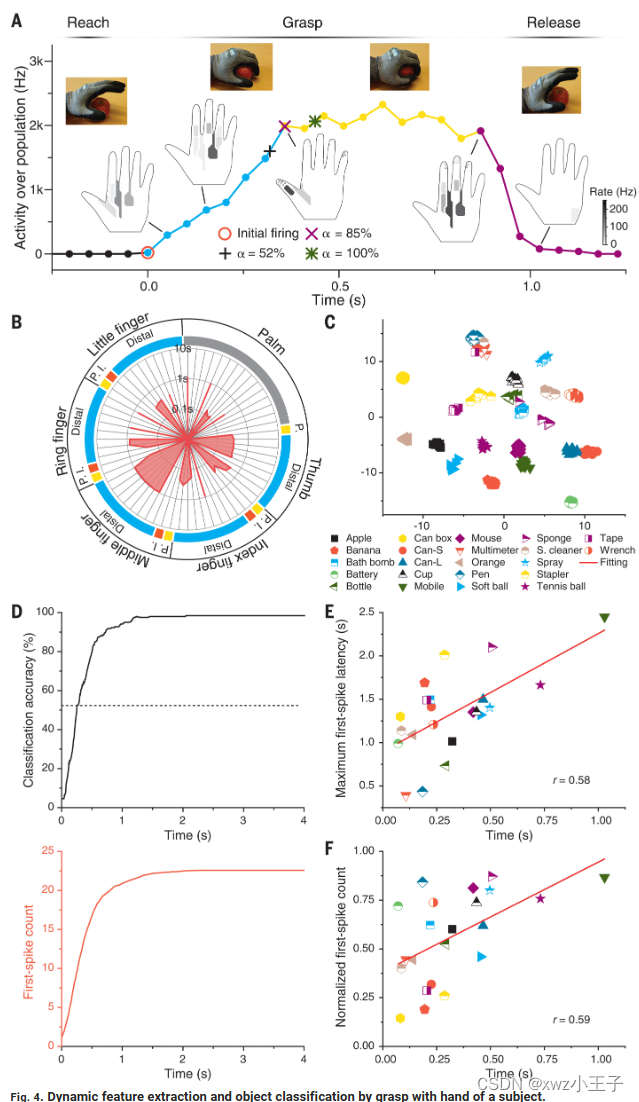
通過抓取22個形狀、大小和剛度不同的日常生活物體,進一步證明了基于系統尖峰時間的動態觸覺信息的有效編碼和利用。抓握由參與者(受試者 1)用左手的電子皮膚進行。例如,抓握蘋果代表著一系列手部姿勢調整的連續運動。這種相互作用可以通過種群上的時間依賴性活動來反映,在傳入元素集合中具有特征性的第一尖峰模式。由于與抓取 22 個物體相關的第一尖峰模式是不同的,因此關于抓取它們的動態信息在第一尖峰模式中得到了很好的編碼。
該工作為推進神經形態觸覺系統的發展奠定了堅實的基礎,該系統從機理上模仿人類的觸覺。在天然皮膚中復制各種機械感受器的人工受體的結合,從而增強信息編碼能力和整體效率,是一條進步路線。在手部假肢的實際應用領域,最佳方法是用美容手套包裹傳感陣列或將受體無縫嵌入其中。這些方法為確保精確的觸覺反饋提供了可行的途徑,同時保留了覆蓋物的美感和功能。

—— 零矢量剎車)


)
)
)












)