1. 實驗內容分析
對實驗內容的理解及關鍵點:
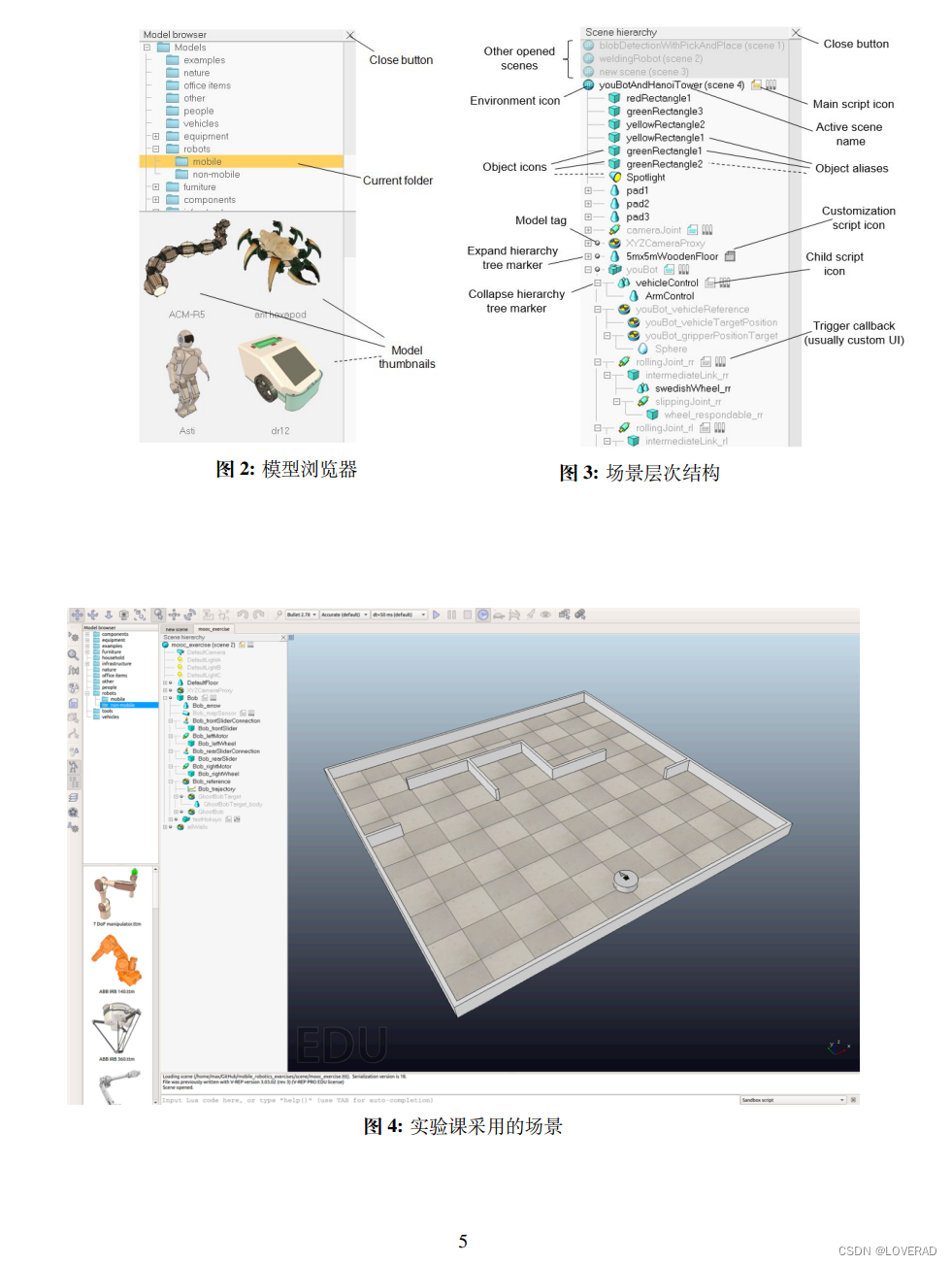
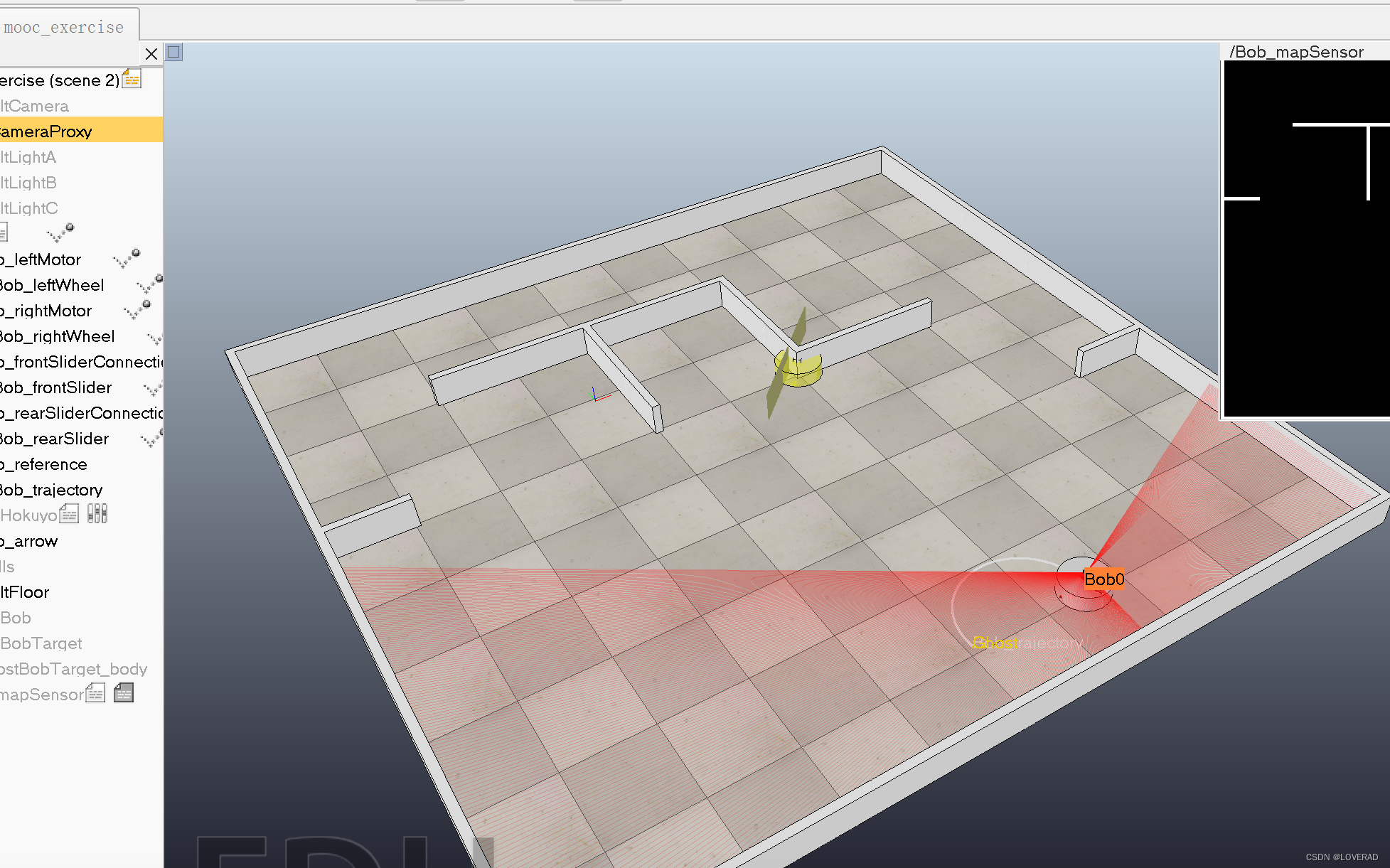
理解這個實驗的關鍵點在于理解如何使用CoppeliaSim和MATLAB來控制和操作機器人。需要熟悉這兩個工具的基本操作,例如如何加載場景、如何修改機器人參數、如何使用MATLAB客戶端程序來控制機器人等。此外,還需要理解機器人的基本運動原理,例如,改變車輪的速度會如何影響機器人的運動。這些知識和技能將對我們在機器人技術領域的進一步學習和研究有很大的幫助。
任務一及任務二的實驗思路:
任務一:加載場景、修改機器人參數
- 首先,需要加載預設的場景文件。這可以通過菜單欄的File–> Open Scene…選項來完成,或者直接雙擊場景文件。
- 加載場景后,需要點擊開始按鈕(場景視圖上方的播放按鈕)來啟動場景。
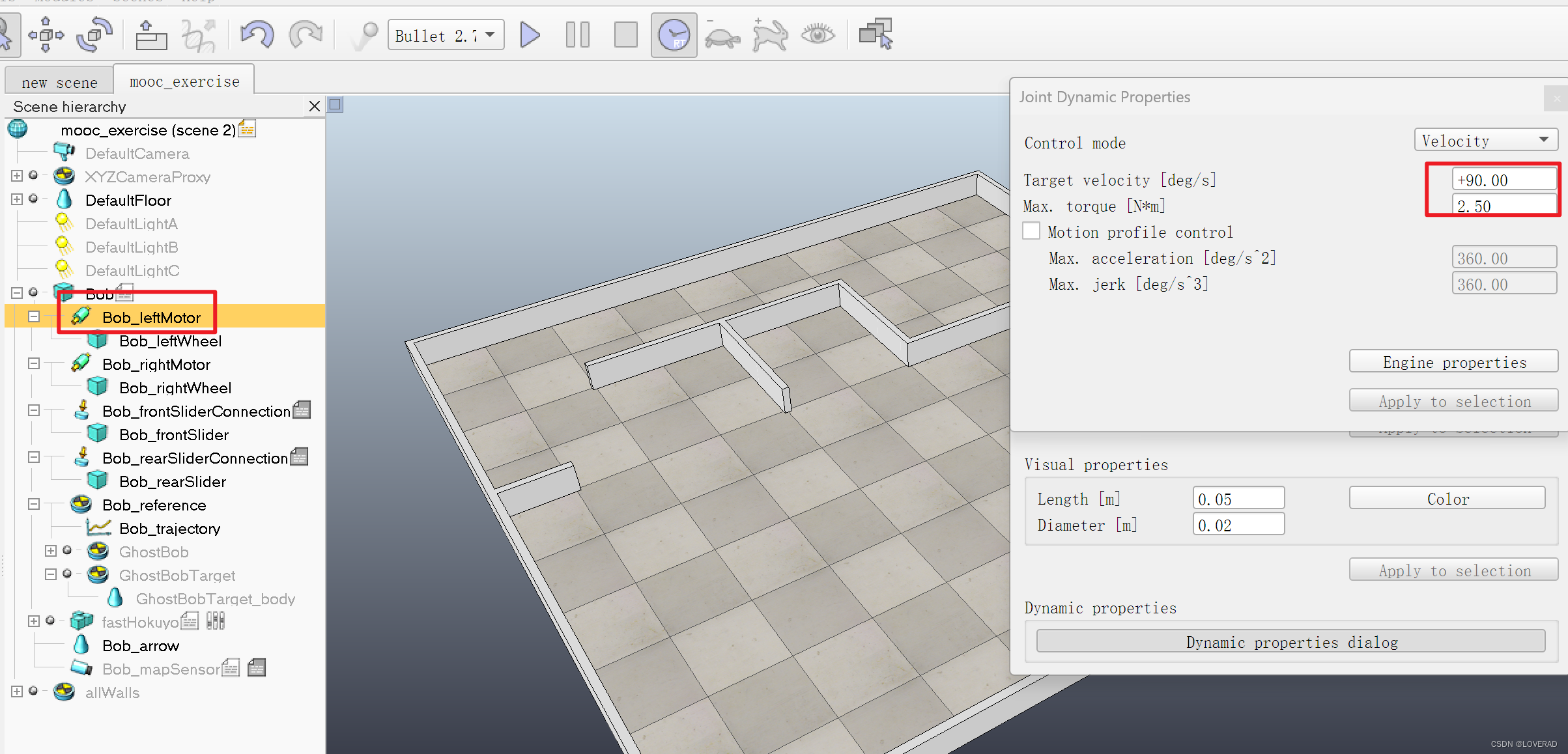
- 接下來,需要展開場景層次中的機器人模型,雙擊Bob_leftMotor的圖標來打開joint property對話框。
- 在joint property對話框中,點擊Show dynamic parameters來打開動力學參數對話框。
- 在動力學參數對話框中,更改選定電機的Target velocity(目標速度)。將其設置為90度/秒,這樣機器人就會開始移動。
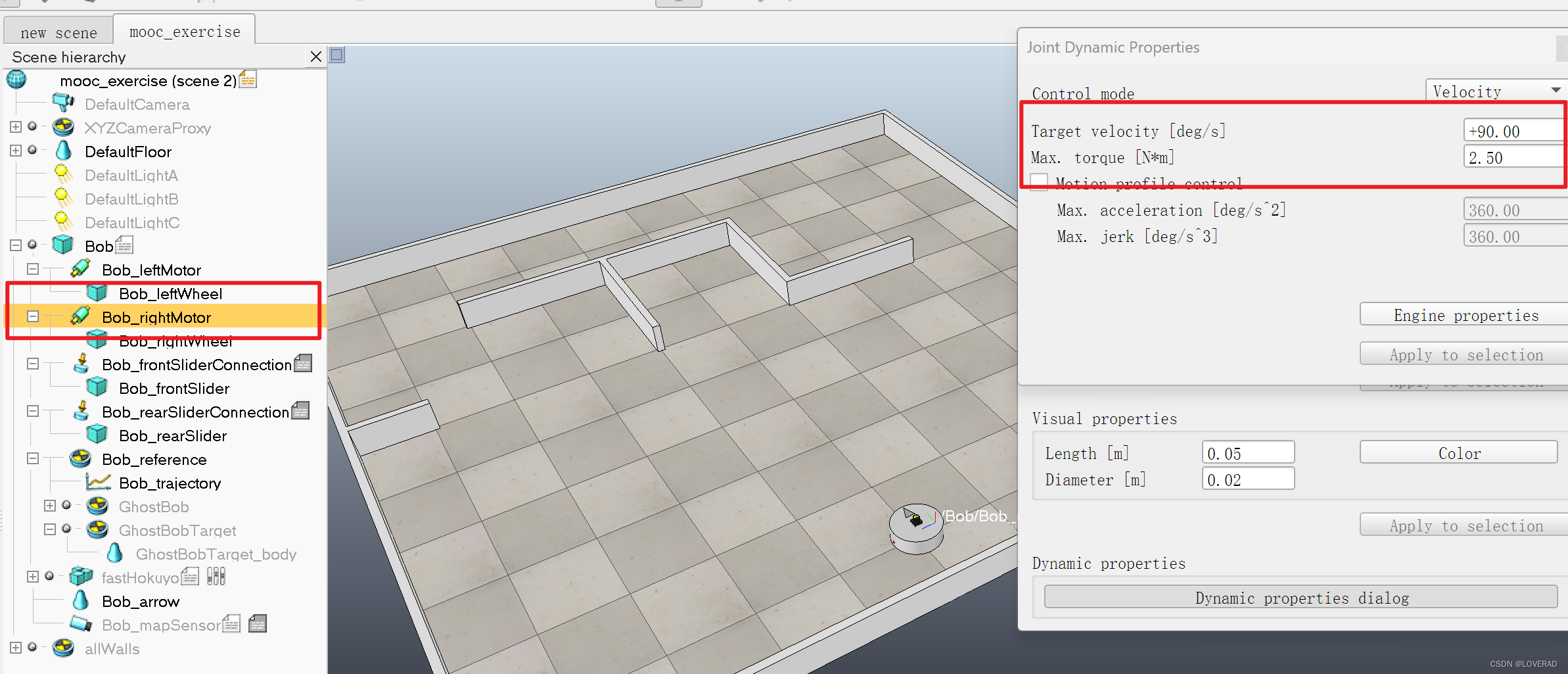
- 最后,對機器人的另一個電機Bob_rightMotor執行同樣的操作,然后按下停止按鈕。
任務二:利用MATLAB客戶端程序實現對機器人的控制
- 首先,需要啟動CoppeliaSim并加載場景文件。
- 然后,需要啟動MATLAB,打開測試程序(test.m),并設置斷點,按F10單步執行程序,觀察每一步執行后場景的變化。
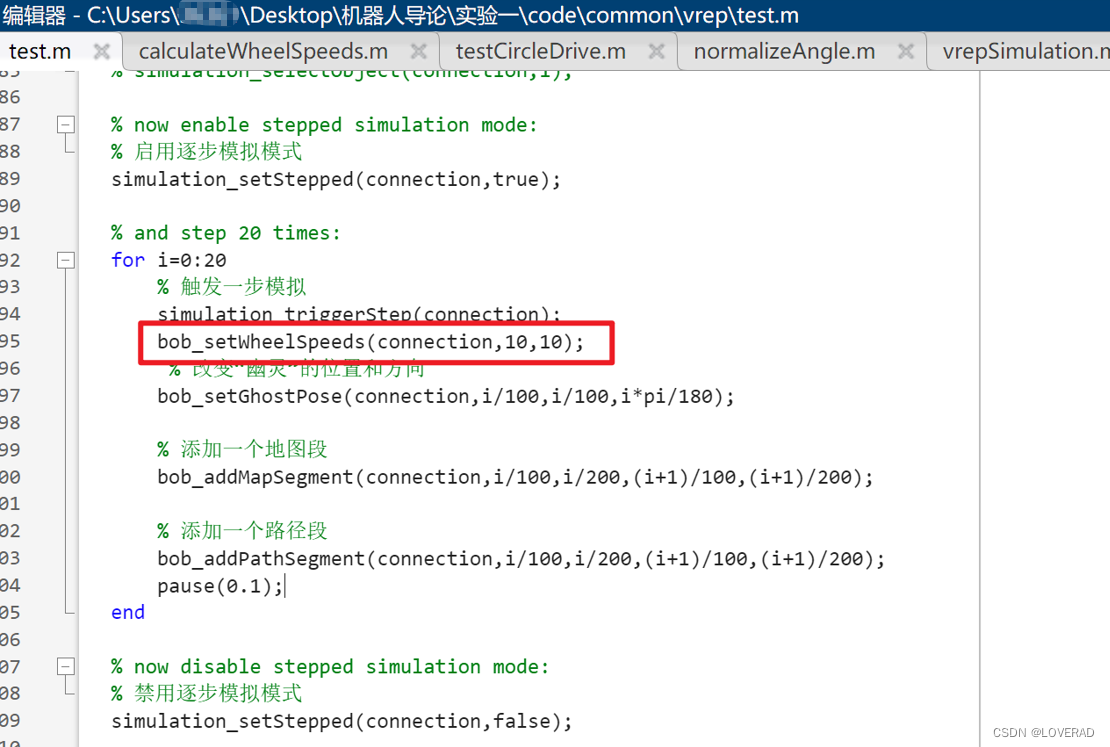
- 在程序的循環部分,添加代碼向機器人發送不同的命令。可以添加一行代碼bob_setWheelSpeeds(connection , 10, 10)將左右車輪速度設置為10 rad/s。
- 如果程序運行沒有報錯,并且CoppeliaSim成功執行仿真,那么這個實驗就完成了。
2. 實驗過程分析
- 機器人的運動:通過觀察機器人在模擬過程中的運動,我們可以了解到機器人的運動狀態,包括速度、方向等。如果機器人能夠按照預期的路徑和速度進行運動,那么說明我們對機器人的控制是成功的。
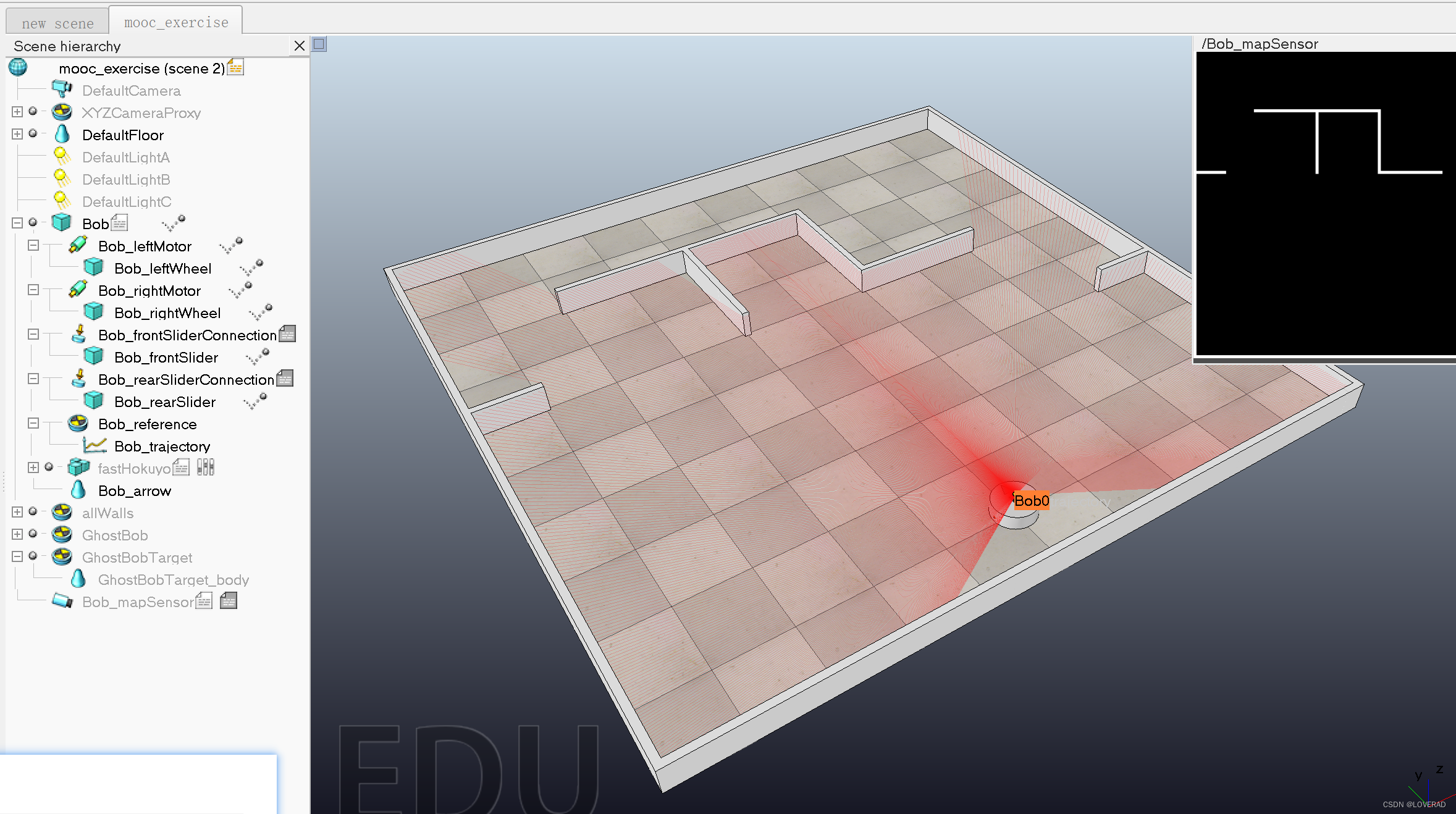
- 地圖和路徑的變化:通過觀察地圖和路徑的變化,我們可以了解到機器人對環境的認知。如果地圖和路徑能夠準確地反映出環境的實際情況,那么說明我們的環境感知和地圖構建是成功的。
- 機器人的參數的變化:通過觀察機器人的參數的變化,我們可以了解到機器人的內部狀態。例如,我們可以通過觀察輪速、編碼器值、位置和方向的變化,來了解機器人的運動狀態和位置狀態。
- 全局地圖的顯示:全局地圖顯示了機器人的當前環境,包括地圖段和路徑段。如果全局地圖能夠準確地反映出環境的實際情況,那么說明我們的環境感知和地圖構建是成功的。
- 目標位置的顯示:目標位置顯示了機器人的預期位置和方向。如果機器人能夠按照預期的路徑和速度進行運動,那么說明我們對機器人的控制是成功的。
3. 實驗結果分析
3.1 加載場景、修改機器人參數
加載場景文件
修改Bob_leftMotor電機參數
修改Bob_ right Motor電機參數
3.2 利用 MATLAB 客戶端程序實現對機器人的控制
設置斷點,按F10單步執行程序,觀察每一步執行后場景的變化。
可以看到目標位置在每一步模擬中的顯示。目標位置顯示了機器人的預期位置和方向
在循環中添加一行代碼,將左右車輪速度設置為10 rad/s
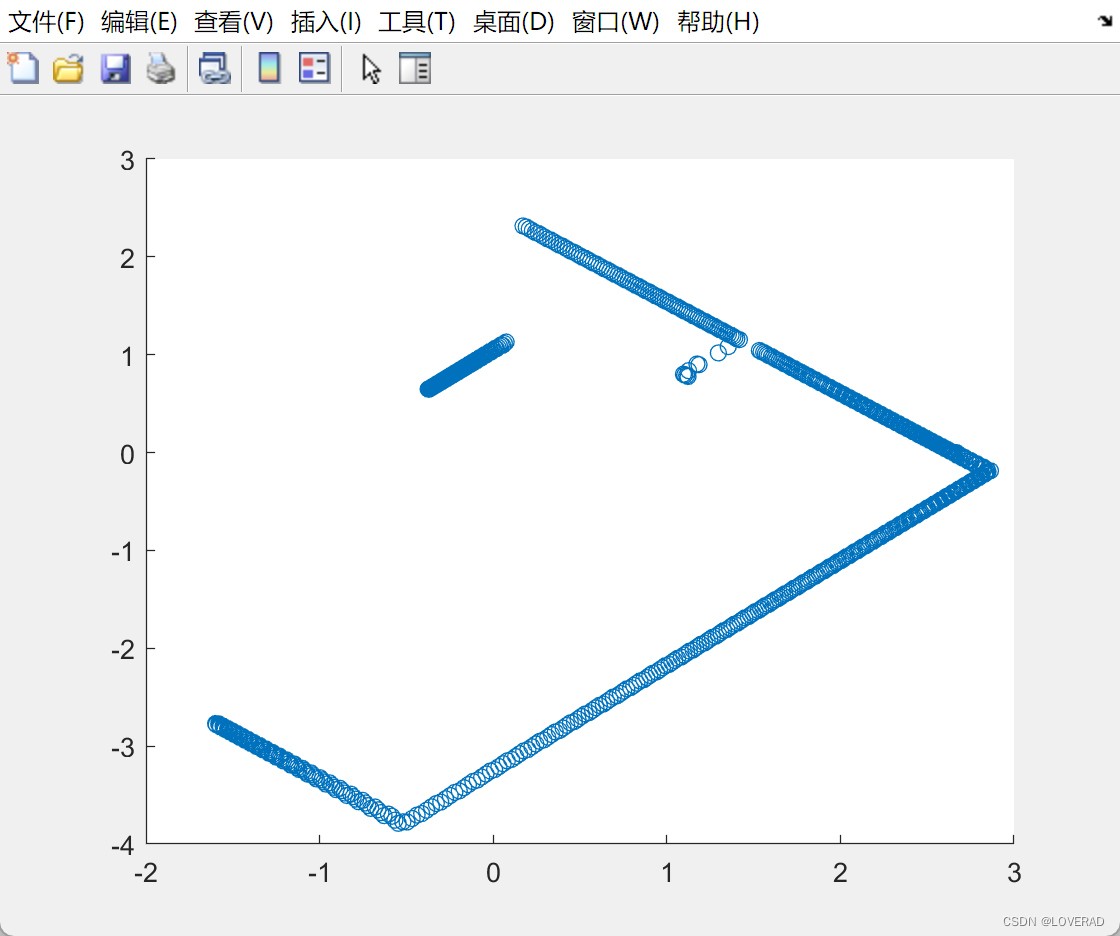
全局地圖
運行截圖

實驗結果分析:
? ? ?通過觀察機器人的參數的變化,我了解到機器人的內部狀態。通過觀察輪速、編碼器值、位置和方向的變化,了解到了機器人的運動狀態和位置狀態。
4. 遇到的問題和心得
遇到的問題
- 在修改機器人參數,更改電機速度的時候不能夠點擊對話框按鈕,最后發現是因為程序正在執行中不能夠修改參數,關閉程序后,重新點擊對話框按鈕就可以設置參數了。
- 不理解test.m中的代碼作用,通過單步執行,可以實時觀察到地圖場景以及機器人運行路線,方向。對代碼有了更加清晰的認識和理解。
實驗心得
????????通過這個實驗我理解了機器人運動的基本原理:通過控制機器人的輪速,我可以觀察到改變輪速會如何影響機器人的運動,從而理解機器人運動的基本原理。
????????熟悉了機器人模擬器的操作:通過加載場景、修改機器人參數、添加地圖和路徑段等操作。掌握了MATLAB和CoppeliaSim的使用:通過編寫和執行MATLAB代碼來控制CoppeliaSim中的機器人,掌握了如何使用MATLAB和CoppeliaSim來進行機器人仿真。
????????我不僅學會了這些操作和機器人運動背后的原理也提高了問題的解決能力:在實驗過程中,可能會遇到各種問題,如代碼錯誤、模擬器崩潰等,都會一直鍛煉著我的能力,讓我直面困難,勇于實踐。



。Javaee項目。ssm項目。)




 | 文件系統和諧共處的基礎)

)


并不可怕,可怕的是...)

![[ACTF新生賽2020]SoulLike](http://pic.xiahunao.cn/[ACTF新生賽2020]SoulLike)



