前置知識:樹的基本概念及性質
為了保證學習效果,請保證已經掌握前置知識之后,再來學習本章節!如果在閱讀中遇到困難,也可以回到前面章節查閱。
學習目標
- 掌握圖的基本概念
- 掌握圖的一些性質
圖的概念
基本概念
圖 (Graph)?是一個二元組?𝐺=(𝑉(𝐺),𝐸(𝐺))G=(V(G),E(G))?。其中?𝑉(𝐺)V(G)?是非空集,稱為?點集 (Vertex set)?,對于?𝑉V?中的每個元素,我們稱其為?頂點 (Vertex)?或?節點 (Node)?,簡稱?點?;?𝐸(𝐺)E(G)?為?𝑉(𝐺)V(G)?各結點之間邊的集合,稱為?邊集 (Edge set)?。
常用?𝐺=(𝑉,𝐸)G=(V,E)?表示圖。
當?𝑉,𝐸V,E?都是有限集合時,稱?𝐺G?為?有限圖?。
當?𝑉V?或?𝐸E?是無限集合時,稱?𝐺G?為?無限圖?。
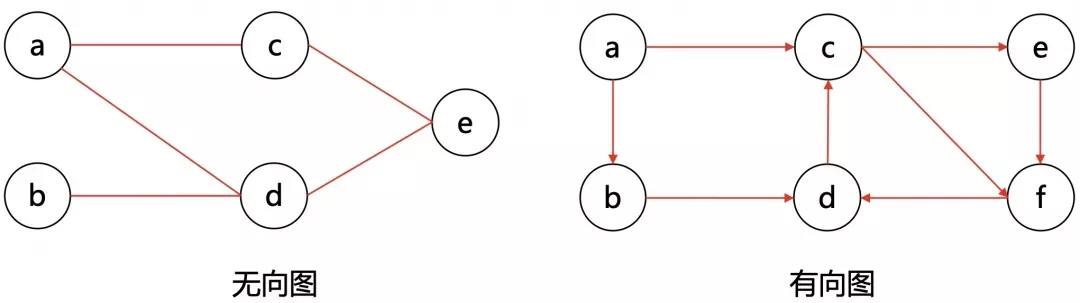
圖有多種,包括?無向圖 (Undirected graph)?,?有向圖 (Directed graph)?,?混合圖 (Mixed graph)?等
若?𝐺G?為無向圖,則?𝐸E?中的每個元素為一個無序二元組?(𝑢,𝑣)(u,v)?,稱作?無向邊 (Undirected edge)?,簡稱?邊 (Edge)?,其中?𝑢,𝑣∈𝑉u,v∈V?。設?𝑒=(𝑢,𝑣)e=(u,v)?,則?𝑢u?和?𝑣v?稱為?𝑒e?的?端點 (Endpoint)?。
若?𝐺G?為混合圖,則?𝐸E?中既有向邊,又有無向邊。
若?𝐺G?的每條邊?𝑒𝑘=(𝑢𝑘,𝑣𝑘)ek?=(uk?,vk?)?都被賦予一個數作為該邊的?權?,則稱?𝐺G?為?賦權圖?。如果這些權都是正實數,就稱?𝐺G?為?正權圖?。
形象地說,圖是由若干點以及連接點與點的邊構成的。
圖上的關系
點與點——鄰接
在無向圖?𝐺=(𝑉,𝐸)G=(V,E)?中,對于兩頂點?𝑢u?和?𝑣v?,若存在邊?(𝑢,𝑣)(u,v)?,則稱?𝑢u?和?𝑣v?是?相鄰(鄰接)的?。
一個頂點?𝑣∈𝑉v∈V?的?鄰域 (Neighborhood)?是所有與之相鄰的頂點所構成的集合,記作?𝑁(𝑣)N(v)?。
PS:鄰接表存儲的就是鄰域,并且由此得名。
點與邊——關聯
在無向圖?𝐺=(𝑉,𝐸)G=(V,E)?中,若點?𝑣v?是邊?𝑒e?的一個端點,則稱?𝑣v?和?𝑒e?是?關聯的。
度數
與一個頂點?𝑣v?關聯的邊的條數稱作該頂點的?度 (Degree)?,記作?𝑑(𝑣)d(v)?。特別地,對于邊?(𝑣,𝑣)(v,v)?,則每條這樣的邊要對?𝑑(𝑣)d(v)?產生?22?的貢獻。
對于無向簡單圖,有?𝑑(𝑣)=∣𝑁(𝑣)∣d(v)=∣N(v)∣?。
握手定理(又稱圖論基本定理):對于任何無向圖?𝐺=(𝑉,𝐸)G=(V,E)?,有?∑𝑣∈𝑉𝑑(𝑣)=2∣𝐸∣∑v∈V?d(v)=2∣E∣?,即無向圖中結點度數的總和等于邊數的兩倍。有向圖中結點的入度之和等于出度之和等于邊數。
推論:?在任意圖中,度數為奇數的點必然有偶數個。
證明:反證法
簡單圖
自環 (Loop)?:對?𝐸E?中的邊?𝑒=(𝑢,𝑣)e=(u,v)?,若?𝑢=𝑣u=v?,則?𝑒e?被稱作一個自環。
重邊/平行邊 (Multiple edge)?:若?𝐸E?中存在兩個完全相同的元素(邊)?𝑒1,𝑒2e1?,e2??,則它們被稱作(一組)重邊。
簡單圖 (Simple graph)?:若一個圖中?沒有自環和重邊,它被稱為簡單圖。非空簡單無向圖中一定存在度相同的結點。
如果一張圖中有自環或重邊,則稱它為?多重圖 (Multigraph)?。

? 在無向圖中?(𝑢,𝑣)(u,v)?和?(𝑣,𝑢)(v,u)?算一組重邊,而在有向圖中,?𝑢→𝑣u→v?和?𝑣→𝑢v→u?不為重邊。
? 在題目中,如果沒有特殊說明,是可以存在自環和重邊的,在做題時需特殊考慮。
路徑
途徑 (Walk)?/?鏈 (Chain)?:一個點和邊的交錯序列,其中首尾是點——?𝑣0,𝑒1,𝑣1,𝑒2,𝑣2,…,𝑒𝑘,𝑣𝑘v0?,e1?,v1?,e2?,v2?,…,ek?,vk??,有時簡寫為?𝑣0→𝑣1→𝑣2→?→𝑣𝑘v0?→v1?→v2?→?→vk??。其中?𝑒𝑖ei??的兩個端點分別為?𝑣𝑖?1vi?1??和?𝑣𝑖vi??。通常來說,邊的數量?𝑘k?被稱作這條途徑的?長度?(如果邊是帶權的,長度通常指路徑上的邊權之和,題目中也可能另有定義)。(以下設?𝑤=[𝑣0,𝑒1,𝑣1,𝑒2,𝑣2,?,𝑒𝑘,𝑣𝑘]w=[v0?,e1?,v1?,e2?,v2?,?,ek?,vk?]?。)
跡 (Trail)?:對于一條途徑?𝑤w?,若?𝑒1,𝑒2,?,𝑒𝑘e1?,e2?,?,ek??兩兩互不相同,則稱?𝑤w?是一條跡。
路徑 (Path)?(又稱?簡單路徑 (Simple path)?):對于一條跡?𝑤w?,除了?𝑣0v0??和?𝑣𝑘vk??允許相同外,其余點兩兩互不相同,則稱?𝑤w?是一條路徑。
回路 (Circuit)?:對于一個跡?𝑤w?,若?𝑣0=𝑣𝑘v0?=vk??,則稱?𝑤w?是一個回路。
環/圈 (Cycle)?(又稱?簡單回路/簡單環 (Simple circuit)?):對于一條簡單路徑?𝑤w?,若?𝑣0=𝑣𝑘v0?=vk??,則稱?𝑤w?是一個環。
!!! warning
關于路徑的定義在不同地方可能有所不同,如,“路徑”可能指本文中的“途徑”,“環”可能指本文中的“回路”。如果在題目中看到類似的詞匯,且沒有“簡單路徑”/“非簡單路徑”(即本文中的“途徑”)等特殊說明,最好詢問一下具體指什么。
連通
無向圖
對于一張無向圖?𝐺=(𝑉,𝐸)G=(V,E)?,對于?𝑢,𝑣∈𝑉u,v∈V?,若存在一條途徑使得?𝑣0=𝑢,𝑣𝑘=𝑣v0?=u,vk?=v?,則稱?𝑢u?和?𝑣v?是?連通的 (Connected)?。由定義,任意一個頂點和自身連通,任意一條邊的兩個端點連通。
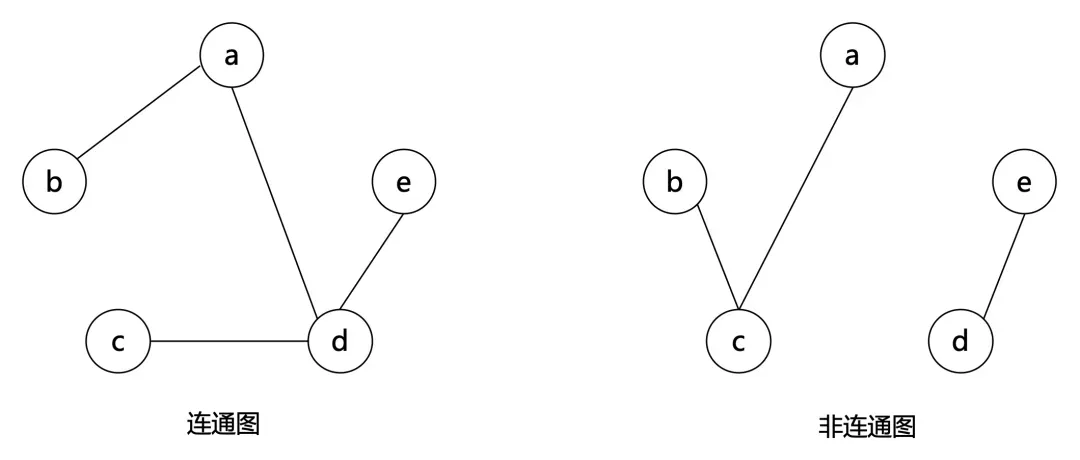
若無向圖?𝐺=(𝑉,𝐸)G=(V,E)?,滿足其中任意兩個頂點均連通,則稱?𝐺G?是?連通圖 (Connected graph)?,?𝐺G?的這一性質稱作?連通性 (Connectivity)?。
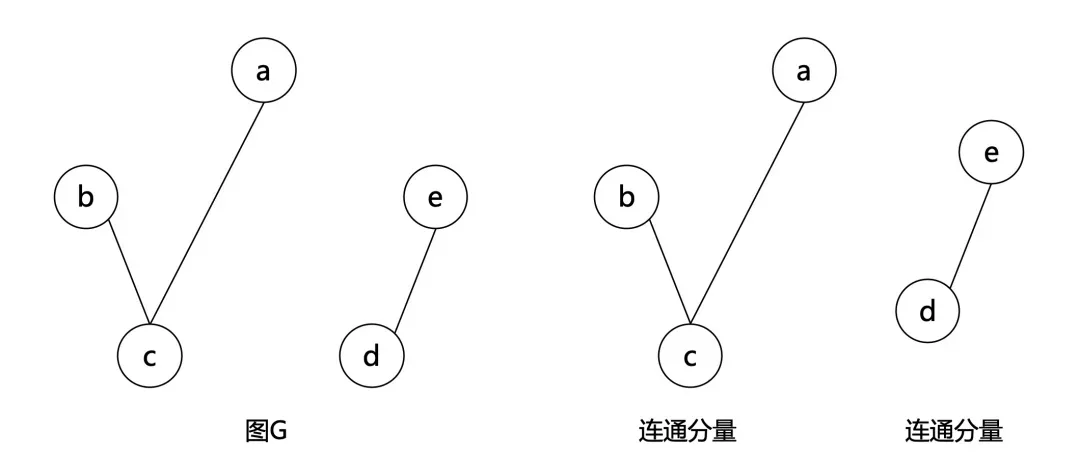
若?𝐻H?是?𝐺G?的一個連通子圖,且不存在?𝐹F?滿足?𝐻?𝐹?𝐺H?F?G?且?𝐹F?為連通圖,則?𝐻H?是?𝐺G?的一個?連通塊/連通分量 (Connected component)?(極大連通子圖)。
有向圖
對于一張有向圖?𝐺=(𝑉,𝐸)G=(V,E)?,對于?𝑢,𝑣∈𝑉u,v∈V?,若存在一條途徑使得?𝑣0=𝑢,𝑣𝑘=𝑣v0?=u,vk?=v?,則稱?𝑢u?可達?𝑣v?。由定義,任意一個頂點可達自身,任意一條邊的起點可達終點。(無向圖中的連通也可以視作雙向可達。)
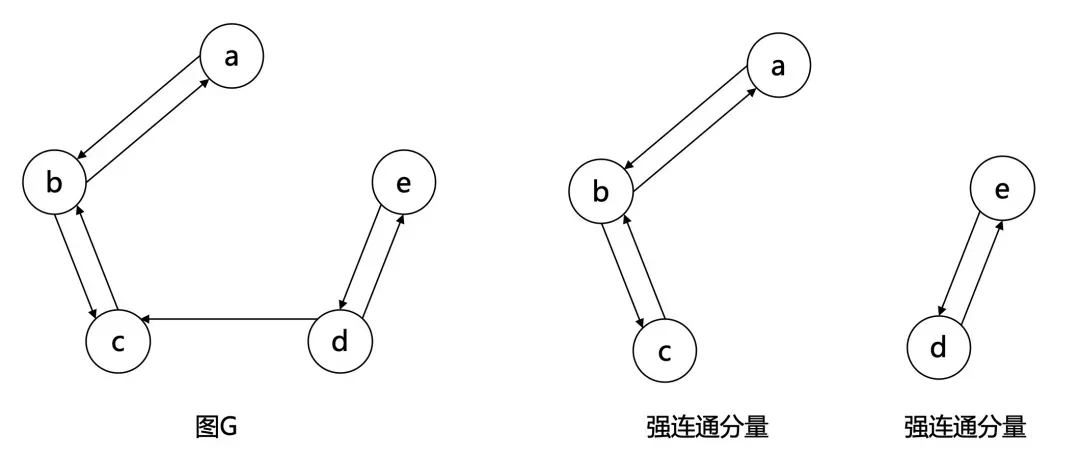
若一張有向圖的節點兩兩互相可達,則稱這張圖是?強連通的 (Strongly connected)?。
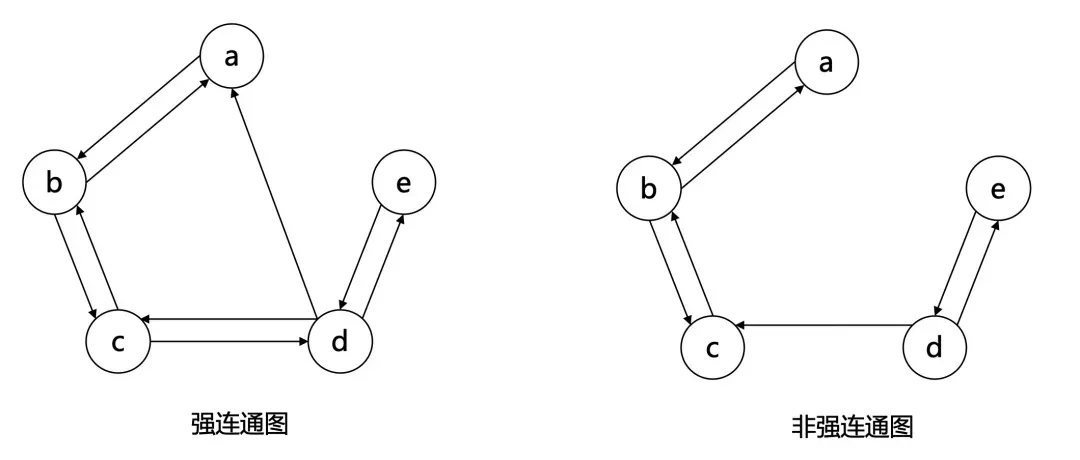
若一張有向圖的邊替換為無向邊后可以得到一張連通圖,則稱原來這張有向圖是?弱連通的 (Weakly connected)?。
與連通分量類似,也有?弱連通分量 (Weakly connected component)?(極大弱連通子圖)和?強連通分量 (Strongly Connected component)?(極大強連通子圖)。
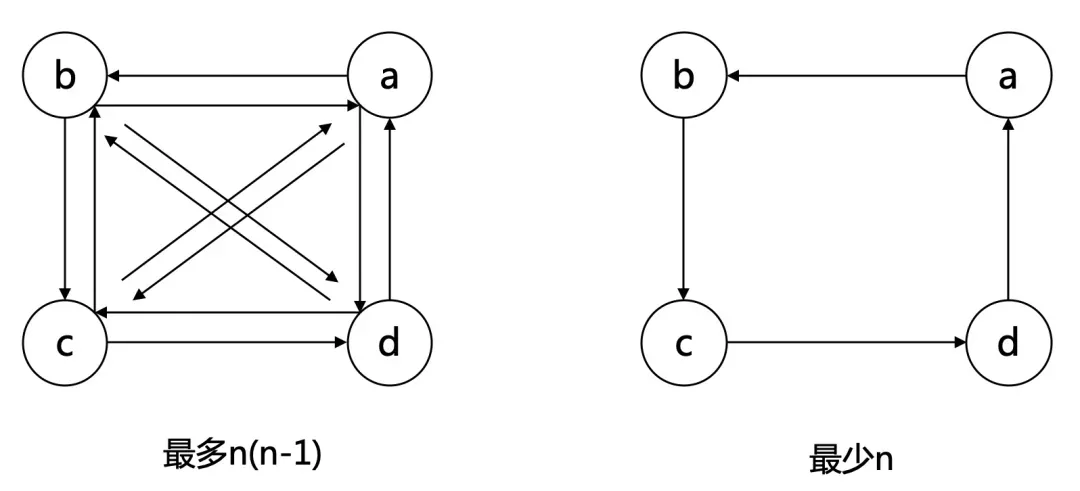
𝑛n?個頂點的強連通圖最多?𝑛(𝑛?1)n(n?1)?條邊,最少?𝑛n?條邊。
圖的連通性也是競賽的一個常見考點,相關算法請后面將學習,現在先理解其概念即可。
稀疏圖/稠密圖
若一張圖的邊數遠小于其點數的平方,那么它是一張?稀疏圖 (Sparse graph)?。
若一張圖的邊數接近其點數的平方,那么它是一張?稠密圖 (Dense graph)?。
這兩個概念并沒有嚴格的定義,一般用于討論?時間復雜度?為?𝑂(∣𝑉∣2)O(∣V∣2)?的算法與?𝑂(∣𝐸∣)O(∣E∣)?的算法的效率差異(在稠密圖上這兩種算法效率相當,而在稀疏圖上?𝑂(∣𝐸∣)O(∣E∣)?的算法效率明顯更高)。
特殊的圖
完全圖
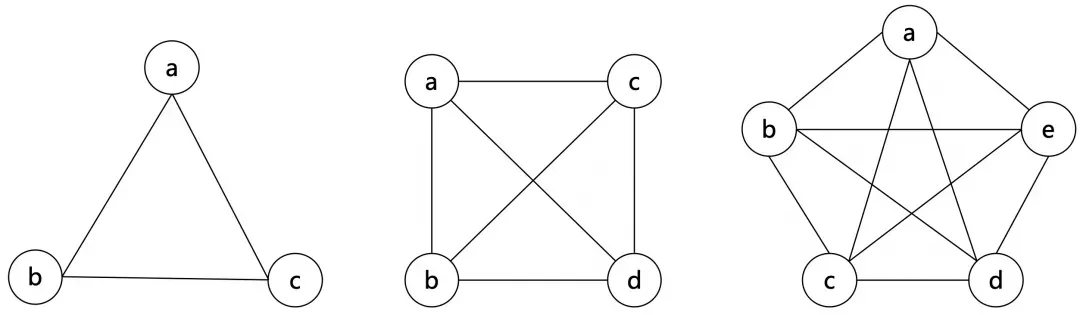
若無向簡單圖?𝐺G?滿足任意不同兩點間均有邊,則稱?𝐺G?為?完全圖 (Complete graph)?,?𝑛n?階完全圖記作?𝐾𝑛Kn??。若有向圖?𝐺G?滿足任意不同兩點間都有兩條方向不同的邊,則稱?𝐺G?為?有向完全圖 (Complete digraph)?。
環圖/圈圖
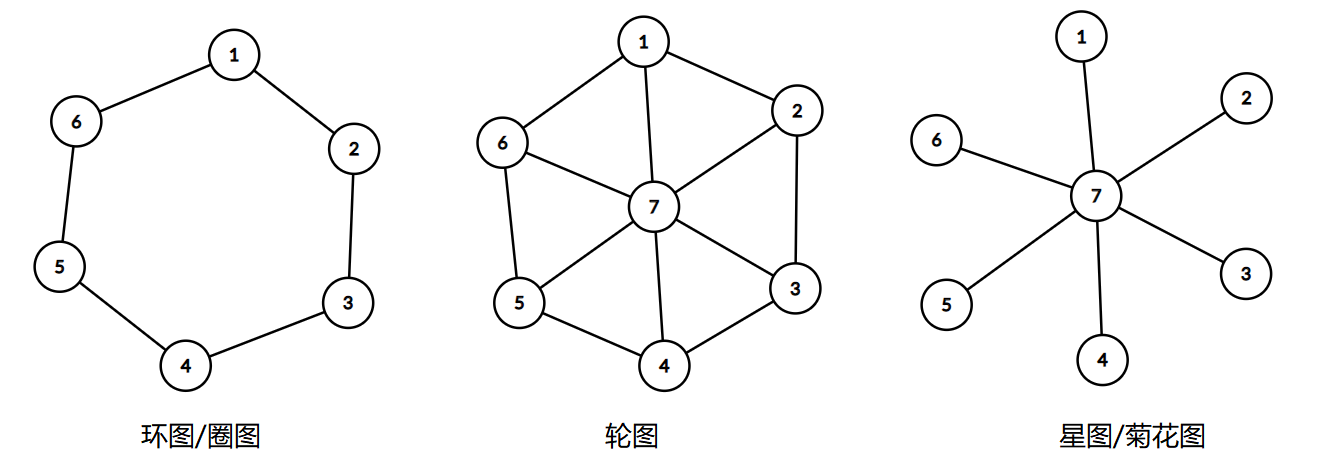
若無向簡單圖?𝐺=(𝑉,𝐸)G=(V,E)?的所有邊恰好構成一個圈,則稱?𝐺G?為?環圖/圈圖 (Cycle graph)?,?𝑛n?(?𝑛≥3n≥3?) 階圈圖記作?𝐶𝑛Cn??。易知,一張圖為圈圖的充分必要條件是,它是?22?- 正則連通圖。
星圖/菊花圖
若無向簡單圖?𝐺=(𝑉,𝐸)G=(V,E)?滿足,存在一個點?𝑣v?為支配點,其余點之間沒有邊相連,則稱?𝐺G?為?星圖/菊花圖 (Star graph)?,?𝑛+1n+1?(?𝑛≥1n≥1?) 階星圖記作?𝑆𝑛Sn??。
輪圖
若無向簡單圖?𝐺=(𝑉,𝐸)G=(V,E)?滿足,存在一個點?𝑣v?為支配點,其它點之間構成一個圈,則稱?𝐺G?為?輪圖 (Wheel Graph)?,?𝑛+1n+1?(?𝑛≥3n≥3?) 階輪圖記作?𝑊𝑛Wn??。
鏈
若無向簡單圖?𝐺=(𝑉,𝐸)G=(V,E)?的所有邊恰好構成一條簡單路徑,則稱?𝐺G?為?鏈 (Chain/Path Graph)?,?𝑛n?階的鏈記作?𝑃𝑛Pn??。易知,一條鏈由一個圈圖刪去一條邊而得。
樹
如果一張無向連通圖不含環,則稱它是一棵?樹 (Tree)?。相關內容詳見 樹基礎 。
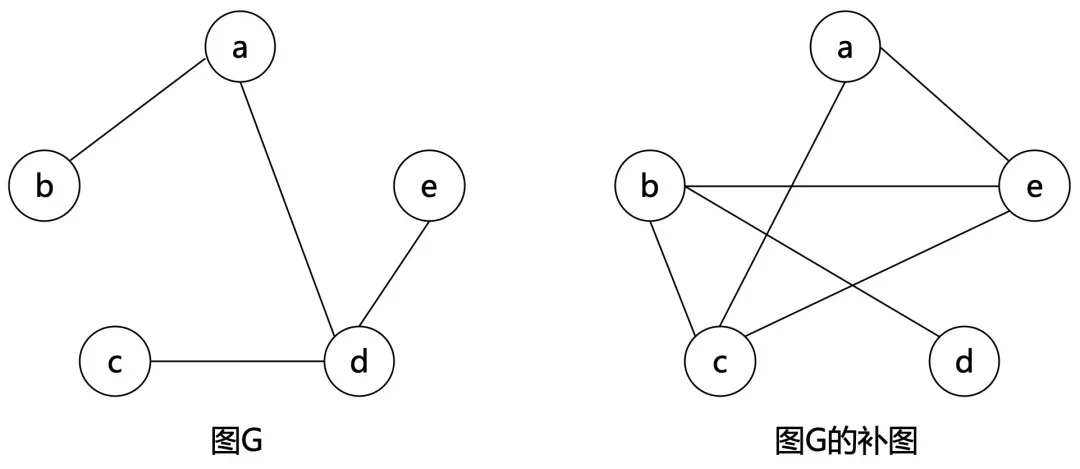
補圖
對于無向簡單圖?𝐺=(𝑉,𝐸)G=(V,E)?,它的?補圖 (Complement graph)?指的是這樣的一張圖:記作?𝐺ˉGˉ?,滿足?𝑉(𝐺ˉ)=𝑉(𝐺)V(Gˉ)=V(G)?,且對任意節點對?(𝑢,𝑣)(u,v)?,?(𝑢,𝑣)∈𝐸(𝐺ˉ)(u,v)∈E(Gˉ)?當且僅當?(𝑢,𝑣)?𝐸(𝐺)(u,v)∈/E(G)?。
反圖
對于有向圖?𝐺=(𝑉,𝐸)G=(V,E)?,它的?反圖 (Transpose Graph)?指的是點集不變,每條邊反向得到的圖,即:若?𝐺G?的反圖為?𝐺′=(𝑉,𝐸′)G′=(V,E′)?,則?𝐸′={(𝑣,𝑢)∣(𝑢,𝑣)∈𝐸}E′={(v,u)∣(u,v)∈E}?。
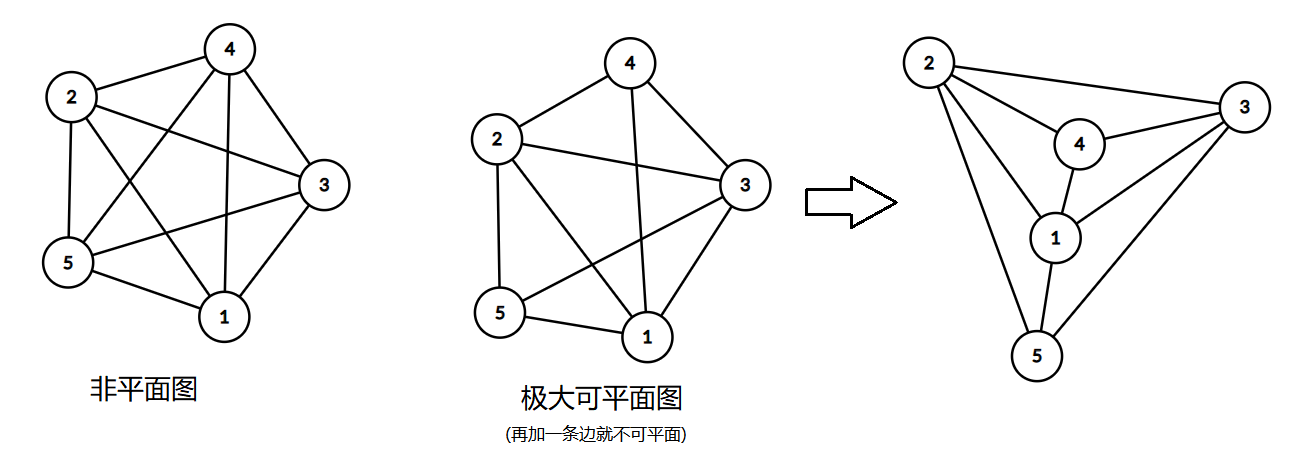
平面圖
如果一張圖可以畫在一個平面上,且沒有兩條邊在非端點處相交,那么這張圖是一張?平面圖 (Planar graph)?。一張圖的任何子圖都不是?𝐾5K5??或?𝐾3,3K3,3??是其為一張平面圖的充要條件。對于簡單連通平面圖?𝐺=(𝑉,𝐸)G=(V,E)?且?𝑉≥3V≥3?,?∣𝐸∣≤3∣𝑉∣?6∣E∣≤3∣V∣?6?。
?
學習目標
- 掌握圖的四種存儲方法的代碼實現
- 理解圖的四種存儲方法各自的時間空間復雜度
- 能夠根據題目的要求和數據范圍,選擇合適存圖方式
圖的邏輯結構
一張圖是由節點和邊構成的,一個無向圖如下圖所示:
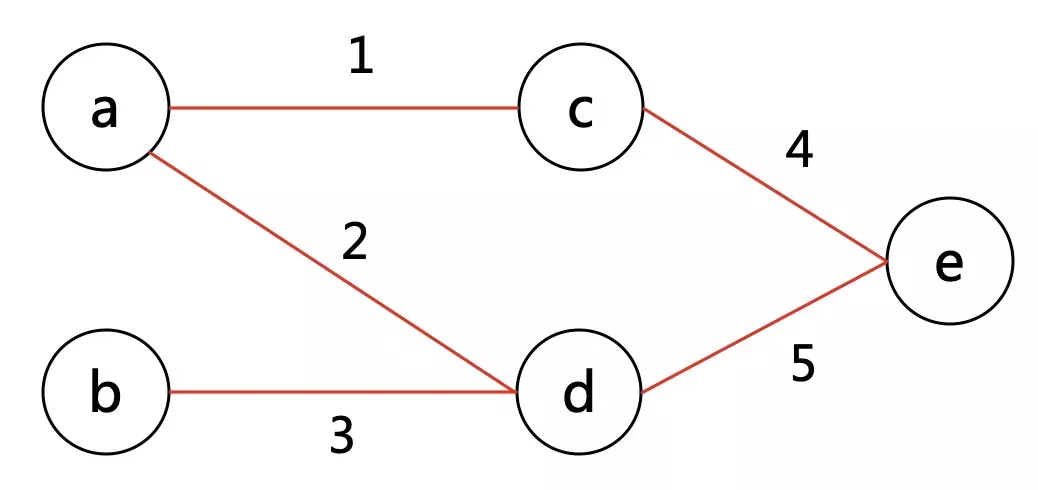
什么叫?「邏輯結構」?就是說為了方便研究,我們把圖?抽象?成這個樣子。
根據這個邏輯結構,我們可以認為每個節點的實現如下:
// 圖節點的邏輯結構
struct node {int data; // 存當前結點信息vector<int> neighbors; // 存鄰接的所有結點
}
看到這個實現,你有沒有很熟悉?它和我們之前說的多叉樹節點幾乎完全一樣:
// 樹節點的邏輯結構
struct node {int data; // 存當前結點信息vector<int> son; // 存所有的子結點
}
Copy
不過呢,上面的這種實現是「邏輯上的」,實際上我們很少用這個node類實現圖,而是用接下來介紹的幾種方法去存儲。其中包含我們前面經常提到的?鄰接表和鄰接矩陣。
圖的存儲方法
接下來描述圖的具體四種存儲方式,這四種方式是我們今后和圖這種數據結構打交道的接口,請一定要掌握。
首先約定,用?𝑛n?代指圖的點數,用?𝑚m?代指圖的邊數,用?𝑑+(𝑢)d+(u)?代指點?𝑢u?的出度,即以?𝑢u?為出發點的邊數。
直接存邊
方法
使用一個數組來存邊,數組中的每個元素都包含一條邊的起點與終點(帶邊權的圖還包含邊權)。(或者使用多個數組分別存起點,終點和邊權。)
#include <iostream>
#include <vector>
using namespace std;struct Edge {int u, v, w; // 一條邊的 起點、終點、權值
};int n, m;
vector<Edge> e;
vector<bool> vis;// 函數功能:判斷 u,v 之間有沒有邊
bool find_edge(int u, int v) {for (int i = 1; i <= m; ++i) {if (e[i].u == u && e[i].v == v) {return true;}}return false;
}// 遍歷圖
void dfs(int u) {if (vis[u]) return;vis[u] = true;for (int i = 1; i <= m; ++i) {if (e[i].u == u) {dfs(e[i].v);}}
}int main() {cin >> n >> m;// 初始化 vector 數組,也可以將 vis 定義成: “bool vis[N];” 以省去初始化。下同vis.resize(n + 1, false);e.resize(m + 1);for (int i = 1; i <= m; ++i) cin >> e[i].u >> e[i].v >> e[i].w;return 0;
}
復雜度
查詢是否存在某條邊:?𝑂(𝑚)O(m)?。
遍歷一個點的所有出邊:?𝑂(𝑚)O(m)?。
遍歷整張圖:?𝑂(𝑛𝑚)O(nm)?。
空間復雜度:?𝑂(𝑚)O(m)?。
應用
由于直接存邊的遍歷效率低下,一般不用于遍歷圖。
在 Kruskal 算法中,由于需要將邊按邊權排序,需要直接存邊。
在有的題目中,需要多次建圖(如建一遍原圖,建一遍反圖),此時既可以使用多個其它數據結構來同時存儲多張圖,也可以將邊直接存下來,需要重新建圖時利用直接存下的邊來建圖。
鄰接矩陣
方法
使用一個二維數組?g?來存邊,其中?g[u][v]?為 1 表示存在?𝑢u?到?𝑣v?的邊,為 0 表示不存在。
如果是帶邊權的圖,可以在?g[u][v]?中存儲?𝑢u?到?𝑣v?的邊的邊權,0 表示沒有連接,其他值表示權重。
如果是無向圖,則將一條無向邊拆成兩條方向相反的邊即可。(所謂的「無向」,也就等同于「雙向」)
#include <iostream>
#include <vector>
using namespace std;const int N = 1e5+5;
int n, m;
bool vis[N];
bool g[N][N];bool find_edge(int u, int v) { return g[u][v]; }void dfs(int u) {if (vis[u]) return;vis[u] = true;for (int v = 1; v <= n; ++v) {if (g[u][v]) {dfs(v);}}
}int main() {cin >> n >> m;fill_n(vis, N, false); // 將 vis 數組清 false,類似 memsetfill_n(g, N*N, false);for (int i = 1; i <= m; ++i) {int u, v;cin >> u >> v;g[u][v] = true; // u->v 有條單向邊// 如果是雙向邊// g[u][v] = g[v][u] = true;}return 0;
}
復雜度
查詢是否存在某條邊:?𝑂(1)O(1)?。
遍歷一個點的所有出邊:?𝑂(𝑛)O(n)?。
遍歷整張圖:?𝑂(𝑛2)O(n2)?。
空間復雜度:?𝑂(𝑛2)O(n2)?。
應用
鄰接矩陣只適用于沒有重邊(或重邊可以忽略)的情況。
其最顯著的優點是可以?𝑂(1)O(1)?查詢一條邊是否存在。
由于鄰接矩陣在稀疏圖上效率很低(尤其是在點數較多的圖上,空間無法承受),所以一般只會?在稠密圖上使用鄰接矩陣。并且,在稠密圖上使用鄰接矩陣的運行效率遠高于鄰接表,這是因為 CPU 中順序訪問的速度是遠高于隨機訪問的(緩存命中)。
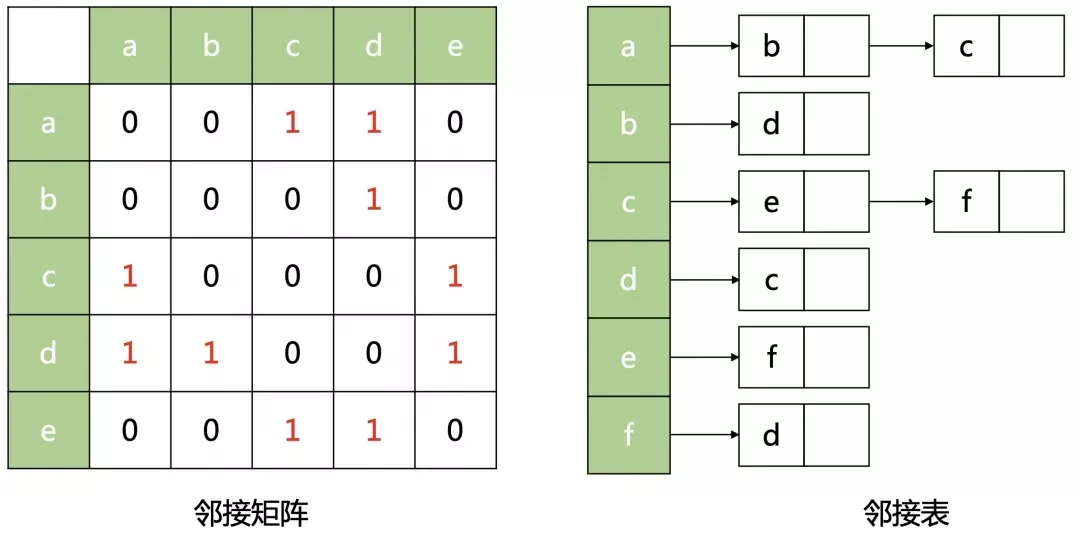
鄰接表
方法
使用一個支持動態增加元素的數據結構構成的數組,如?vector<int> g[N]?來存邊,其中?g[u]?存儲的是點?𝑢u?的所有出邊的相關信息(終點、邊權等)。
#include <iostream>
#include <vector>
using namespace std;const int N = 1e5+5;
int n, m;
bool vis[N];
vector<int> g[N];bool find_edge(int u, int v) {for (int i = 0; i < g[u].size(); ++i) {if (g[u][i] == v) {return true;}}return false;
}void dfs(int u) {if (vis[u]) return;vis[u] = true;for (int i = 0; i < g[u].size(); ++i) dfs(g[u][i]);
}int main() {cin >> n >> m;vis.resize(n + 1, false);g.resize(n + 1);for (int i = 1; i <= m; ++i) {int u, v;cin >> u >> v;g[u].push_back(v);// 如果是無向圖,還須:// g[v].push_back(u);}return 0;
}
復雜度
查詢是否存在?𝑢u?到?𝑣v?的邊:?𝑂(𝑑+(𝑢))O(d+(u))?(如果事先進行了排序就可以使用 二分查找 做到?𝑂(log?(𝑑+(𝑢)))O(log(d+(u)))?)。
遍歷點?𝑢u?的所有出邊:?𝑂(𝑑+(𝑢))O(d+(u))?。
遍歷整張圖:?𝑂(𝑛+𝑚)O(n+m)?。
空間復雜度:?𝑂(𝑚)O(m)?。
應用
存各種圖都很適合,除非有特殊需求(如需要快速查詢一條邊是否存在,且點數較少,可以使用鄰接矩陣)。
尤其適用于需要對一個點的所有出邊進行排序的場合。
鏈式前向星
方法
本質上是用鏈表實現的鄰接表,示例代碼如下:
#include <iostream>
#include <vector>
using namespace std;const int N = 1e5+5;
int n, m;bool vis[N];
int head[N], nxt[N], to[N], cnt; // 鏈式前向星三要素void add(int u, int v) { // 添加一條 u->v 的邊nxt[++cnt] = head[u]; // cnt 這條邊的后繼(同是 u 的出邊的上一條邊)to[cnt] = v; // 當前邊的終點是 vhead[u] = cnt; // 起點 u 的第一條邊放到了下標 cnt 處(其實是最后一條)
}bool find_edge(int u, int v) {for (int i = head[u]; ~i; i = nxt[i]) { // ~i 表示 i != -1if (to[i] == v) {return true;}}return false;
}void dfs(int u) {if (vis[u]) return;vis[u] = true;cout << u << ' ';for (int i = head[u]; ~i; i = nxt[i])dfs(to[i]);
}int main() {cin >> n >> m;fill_n(vis, N, false);fill_n(head, N, -1);for (int i = 1; i <= m; ++i) {int u, v;cin >> u >> v;add(u, v);}dfs(1);return 0;
}
如果圖是賦權圖,即邊帶有權重時,此時數組定義過多,也可以寫成結構體去保存,參考代碼如下:
#include<bits/stdc++.h>
using namespace std;const int N = 1e5; //點數最大值
int n, m; //n個點,m條邊
int head[N], cnt = -1; //head[i],表示以i為起點的第一條邊在邊集數組的位置(編號)struct Edge
{int to, w, next; // 終點,邊權,同起點的上一條邊的編號
}edge[N];//邊集void add_edge(int u, int v, int w)// 加邊,u 起點,v 終點,w 邊權
{edge[++cnt].next = head[u]; // 以u為起點上一條邊的編號,也就是與這個邊起點相同的上一條邊的編號edge[cnt].to = v; // 終點edge[cnt].w = w; // 權值head[u] = cnt; // 更新以u為起點上一條邊的編號
}
int main()
{cin >> n >> m;int u, v, w;fill_n(head, N, -1);for (int i = 1; i <= m; i++) // 輸入m條邊{cin >> u >> v >> w;add_edge(u, v, w); // 加邊// 加雙向邊// add_edge(u, v, w);// add_edge(v, u, w);}// 輸出每個結點的出邊for (int i = 1; i <= n; i++){cout << i << endl;for (int j = head[i]; ~j; j = edge[j].next) // 遍歷以 i為起點的邊{cout << i << " " << edge[j].to << " " << edge[j].w << endl;}cout << endl;}return 0;
}
/*
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
*/
復雜度
查詢是否存在?𝑢u?到?𝑣v?的邊:?𝑂(𝑑+(𝑢))O(d+(u))?。
遍歷點?𝑢u?的所有出邊:?𝑂(𝑑+(𝑢))O(d+(u))?。
遍歷整張圖:?𝑂(𝑛+𝑚)O(n+m)?。
空間復雜度:?𝑂(𝑚)O(m)?。
應用
注意:利用鏈式前向星遍歷的邊的順序和輸入順序是相反的!
存各種圖都很適合,但是缺點也很明顯,?不能快速查詢一條邊是否存在,也不能方便地對一個點的出邊進行排序。
優點是邊是帶編號的,有時會非常有用,而且如果邊是從數組的偶數位開始存儲( 按上面示例代碼寫法是從 0 開始存儲的,cnt?的初始值為 -1),存雙向邊時?i ^ 1?即是?i?的反邊(常用于網絡流 )。
總結
圖的存儲方法比較多,每種方法各有優缺點,對比如下:
| 直接存邊 | 鄰接矩陣 | 鄰接表 | 鏈式前向星 | |
|---|---|---|---|---|
| 使用場合 | 需要將邊按邊權排序時;需要重新建圖時利用直接存下的邊來建圖 | 只適用于沒有重邊(或重邊可以忽略)的情況;可以?𝑂(1)O(1)?查詢邊;在稠密圖上效率很高 | 消耗空間較小,各種場合都適用,尤其適用于需要對點的出邊排序的場合 | 消耗空間小,各種場合都適用 |
| 缺點 | 遍歷效率低下,一般不用于遍歷圖 | 只適用于沒有重邊(或重邊可以忽略)的情況。 | 需熟練掌握 vector 操作? | 不能迅速查詢邊和對一個點的出邊排序 |
總的來說,就是:
- 需要對所有邊進行排序時,直接存邊;
- 圖很稠密,用鄰接矩陣;
- 其他一般情況,用鄰接表或鏈式前向星都可以。
請在理解各種方法的優缺點并掌握其代碼實現以后,面對具體問題應思考選擇合適的方法。


 | 文件系統和諧共處的基礎)

)


并不可怕,可怕的是...)

![[ACTF新生賽2020]SoulLike](http://pic.xiahunao.cn/[ACTF新生賽2020]SoulLike)




。Javaee項目,ssm vue前后端分離項目)




