一、磁盤存儲優化的核心邏輯
在大規模數據處理場景中,磁盤 I/O 效率是性能瓶頸的核心。磁盤訪問具有以下特性:
- 隨機訪問成本高:磁頭尋道時間(Seek Time)可達毫秒級,相比內存訪問(納秒級)慢百萬倍。
- 順序訪問效率高:連續扇區的讀取速度比隨機讀取快 10 倍以上。
- 頁存儲機制:磁盤以頁(Page,通常 4KB/8KB/16KB)為單位讀寫數據,單次 I/O 操作讀取完整一頁。
B 樹與 B + 樹通過以下設計優化磁盤訪問:
- 矮胖樹結構:每個節點存儲多個鍵值,減少樹的高度(通常 3-4 層即可支撐百萬級數據)。
- 順序訪問支持:B + 樹的葉子節點通過鏈表連接,實現高效范圍查詢。
- 節點對齊頁大小:節點大小等于磁盤頁,單次 I/O 讀取完整節點,減少碎片。
二、B 樹:平衡多路搜索樹的基石
2.1 核心結構與規則
B 樹是一種自平衡的多路搜索樹,其核心規則如下:
- 節點容量:每個節點最多有
m個子節點(m為階數),最少有?m/2?個子節點。 - 鍵值分布:節點內鍵值有序排列,左子樹鍵值 < 當前鍵值 < 右子樹鍵值。
- 平衡條件:所有葉子節點位于同一層,根節點至少有 2 個子節點(除非樹高為 1)。
- 節點分裂與合并:插入 / 刪除操作導致節點溢出或不足時,通過分裂 / 合并保持平衡。
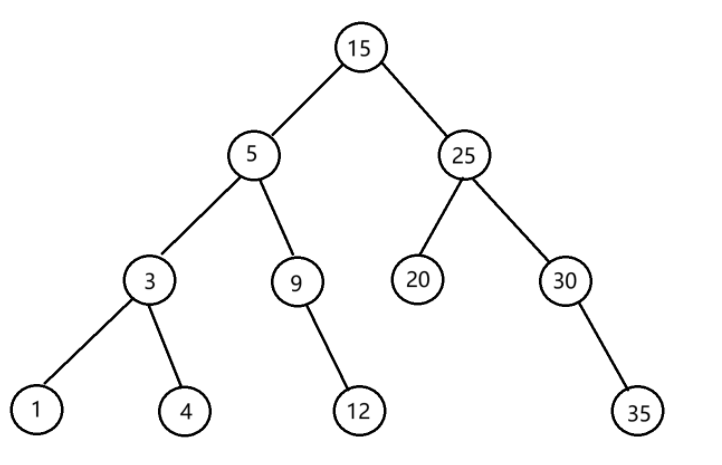
示例結構(m=3)
2.2 關鍵操作詳解
插入操作(以 m=3 為例)
- 查找插入位置:從根節點開始,逐層向下找到目標葉子節點。
- 處理節點溢出:
- 若葉子節點已滿(鍵值數 = m-1),分裂為左右兩部分,中間鍵值提升至父節點。
- 若父節點溢出,遞歸向上分裂,可能導致樹高增加。
刪除操作(以 m=3 為例)
- 查找刪除位置:定位到包含目標鍵值的節點。
- 處理節點不足:
- 若刪除后節點鍵值數 <
?m/2?-1,從兄弟節點借鍵或與兄弟節點合并。 - 若父節點鍵值數不足,遞歸向上處理。
- 若刪除后節點鍵值數 <
2.3 代碼實現
#include <vector>
#include <algorithm>
#include <stdexcept>// B樹節點類模板
template <typename T, int M> // M為B樹的階數
class BTreeNode {
public:std::vector<T> keys; // 存儲鍵值std::vector<BTreeNode<T, M>*> children; // 存儲子節點指針bool is_leaf; // 是否為葉子節點// 構造函數BTreeNode(bool leaf = true) : is_leaf(leaf) {}
};// B樹類模板
template <typename T, int M>
class BTree {
private:BTreeNode<T, M>* root; // 根節點指針// 分裂子節點:將full_child分裂為兩個節點void splitChild(BTreeNode<T, M>* parent, int child_idx) {BTreeNode<T, M>* full_child = parent->children[child_idx];BTreeNode<T, M>* new_node = new BTreeNode<T, M>(full_child->is_leaf);int mid = M / 2;// 復制中間鍵右側的鍵到新節點for (int i = mid + 1; i < M; ++i) {new_node->keys.push_back(full_child->keys[i]);}full_child->keys.resize(mid); // 保留中間鍵左側的鍵// 如果不是葉子節點,復制子節點指針if (!full_child->is_leaf) {for (int i = mid + 1; i <= M; ++i) {new_node->children.push_back(full_child->children[i]);}full_child->children.resize(mid + 1);}// 將新節點插入到父節點的子節點列表parent->children.insert(parent->children.begin() + child_idx + 1, new_node);// 將中間鍵提升到父節點parent->keys.insert(parent->keys.begin() + child_idx, full_child->keys[mid]);}// 插入非滿節點void insertNonFull(BTreeNode<T, M>* node, const T& key) {int i = node->keys.size() - 1;// 如果是葉子節點,直接插入鍵if (node->is_leaf) {node->keys.push_back(key);// 保持鍵的有序性while (i >= 0 && key < node->keys[i]) {node->keys[i + 1] = node->keys[i];--i;}node->keys[i + 1] = key;} else {// 找到插入的子節點位置while (i >= 0 && key < node->keys[i]) {--i;}int child_idx = i + 1;// 檢查子節點是否已滿if (node->children[child_idx]->keys.size() == M - 1) {splitChild(node, child_idx); // 分裂子節點// 確定插入到分裂后的哪個子節點if (key > node->keys[child_idx]) {child_idx++;}}insertNonFull(node->children[child_idx], key); // 遞歸插入}}public:// 構造函數BTree() {root = new BTreeNode<T, M>();}// 插入鍵值void insert(const T& key) {BTreeNode<T, M>* r = root;// 如果根節點已滿,分裂根節點if (r->keys.size() == M - 1) {BTreeNode<T, M>* new_root = new BTreeNode<T, M>(false);root = new_root;new_root->children.push_back(r); // 舊根成為新根的子節點splitChild(new_root, 0); // 分裂舊根insertNonFull(new_root, key); // 插入鍵到新根} else {insertNonFull(r, key); // 直接插入到非滿的根節點}}// 查找鍵值(返回是否存在)bool search(const T& key) {return searchHelper(root, key);}private:// 查找輔助函數bool searchHelper(BTreeNode<T, M>* node, const T& key) {int i = 0;// 找到第一個大于等于key的位置while (i < node->keys.size() && key > node->keys[i]) {++i;}// 如果找到匹配的鍵,返回trueif (i < node->keys.size() && key == node->keys[i]) {return true;}// 如果是葉子節點且未找到,返回falseif (node->is_leaf) {return false;}// 遞歸查找子節點return searchHelper(node->children[i], key);}
};
三、B + 樹:數據庫索引的黃金標準
3.1 結構增強與優化
B + 樹在 B 樹基礎上進行了以下改進:
- 數據全在葉子節點:內部節點僅存儲鍵值和子節點指針,不存儲實際數據。
- 葉子節點鏈表:所有葉子節點通過雙向鏈表連接,支持高效范圍查詢。
- 更高的扇出:內部節點鍵值數更多,樹高更低(通常比 B 樹矮 1-2 層)。
3.2 核心操作優化
插入操作(以 m=3 為例)
- 分裂策略:僅分裂葉子節點,中間鍵值提升至父節點,內部節點鍵值數可能超過
m-1。 - 鏈表維護:分裂后更新相鄰葉子節點的前后指針。
刪除操作(以 m=3 為例)
- 合并策略:若葉子節點鍵值數不足,優先從兄弟節點借鍵;若兄弟節點也不足,則合并并更新父節點指針。
- 鏈表調整:合并后重新連接鏈表指針。
3.3 代碼實現
#include <vector>
#include <algorithm>
#include <stdexcept>// B+樹節點類模板
template <typename T, int M> // M為B+樹的階數
class BPlusTreeNode {
public:std::vector<T> keys; // 存儲鍵值std::vector<BPlusTreeNode<T, M>*> children; // 存儲子節點指針BPlusTreeNode<T, M>* next; // 葉子節點的鏈表指針(用于范圍查詢)bool is_leaf; // 是否為葉子節點// 構造函數BPlusTreeNode(bool leaf = true) : is_leaf(leaf), next(nullptr) {}
};// B+樹類模板
template <typename T, int M>
class BPlusTree {
private:BPlusTreeNode<T, M>* root; // 根節點指針BPlusTreeNode<T, M>* leaf_head; // 葉子節點鏈表頭(便于范圍查詢)// 分裂子節點void splitChild(BPlusTreeNode<T, M>* parent, int child_idx) {BPlusTreeNode<T, M>* full_child = parent->children[child_idx];BPlusTreeNode<T, M>* new_node = new BPlusTreeNode<T, M>(full_child->is_leaf);int mid = (M - 1) / 2; // B+樹分裂點(保留中間鍵在原節點)// 復制中間鍵右側的鍵到新節點for (int i = mid + 1; i < M; ++i) {new_node->keys.push_back(full_child->keys[i]);}full_child->keys.resize(mid + 1); // 保留中間鍵// 如果是葉子節點,處理鏈表指針if (full_child->is_leaf) {new_node->next = full_child->next;full_child->next = new_node;} else {// 非葉子節點復制子節點指針for (int i = mid + 1; i <= M; ++i) {new_node->children.push_back(full_child->children[i]);}full_child->children.resize(mid + 1);}// 插入新節點到父節點parent->children.insert(parent->children.begin() + child_idx + 1, new_node);// 父節點插入分裂點的鍵(B+樹父節點存儲子節點的最小鍵)parent->keys.insert(parent->keys.begin() + child_idx, full_child->keys[mid]);}// 插入非滿節點void insertNonFull(BPlusTreeNode<T, M>* node, const T& key) {int i = node->keys.size() - 1;// 葉子節點直接插入if (node->is_leaf) {node->keys.push_back(key);// 保持有序while (i >= 0 && key < node->keys[i]) {node->keys[i + 1] = node->keys[i];--i;}node->keys[i + 1] = key;} else {// 找到子節點位置while (i >= 0 && key < node->keys[i]) {--i;}int child_idx = i + 1;// 檢查子節點是否已滿if (node->children[child_idx]->keys.size() == M) {splitChild(node, child_idx);if (key > node->keys[child_idx]) {child_idx++;}}insertNonFull(node->children[child_idx], key);}}public:// 構造函數BPlusTree() {root = new BPlusTreeNode<T, M>();leaf_head = root; // 初始葉子頭為根節點}// 插入鍵值void insert(const T& key) {BPlusTreeNode<T, M>* r = root;// 根節點已滿,分裂根節點if (r->keys.size() == M) {BPlusTreeNode<T, M>* new_root = new BPlusTreeNode<T, M>(false);root = new_root;new_root->children.push_back(r);splitChild(new_root, 0);insertNonFull(new_root, key);} else {insertNonFull(r, key);}// 更新葉子頭(如果根節點分裂后葉子頭變化)if (!root->is_leaf) {BPlusTreeNode<T, M>* temp = root;while (!temp->is_leaf) {temp = temp->children[0];}leaf_head = temp;}}// 范圍查詢:返回[start, end]之間的所有鍵std::vector<T> rangeQuery(const T& start, const T& end) {std::vector<T> result;BPlusTreeNode<T, M>* current = leaf_head;// 找到起始葉子節點while (current != nullptr) {auto it = std::lower_bound(current->keys.begin(), current->keys.end(), start);if (it != current->keys.end()) {break;}current = current->next;}// 遍歷葉子節點鏈表收集結果while (current != nullptr) {for (const T& key : current->keys) {if (key > end) {return result;}if (key >= start) {result.push_back(key);}}current = current->next;}return result;}// 點查詢:返回是否存在bool search(const T& key) {BPlusTreeNode<T, M>* current = root;while (current != nullptr) {int i = 0;while (i < current->keys.size() && key > current->keys[i]) {++i;}// 葉子節點檢查是否存在if (current->is_leaf) {return (i < current->keys.size() && current->keys[i] == key);}// 非葉子節點繼續向下查找current = current->children[i];}return false;}
};
四、B 樹與 B + 樹深度對比
| 特性 | B 樹 | B + 樹 |
|---|---|---|
| 數據存儲 | 所有節點均可存儲數據 | 僅葉子節點存儲數據 |
| 樹高 | 較高(相同數據量下比 B + 樹高 1-2 層) | 較低(內部節點鍵值更多) |
| 查詢效率 | 點查詢可能更快(非葉子節點命中) | 點查詢穩定(必須到葉子節點) |
| 范圍查詢 | 需中序遍歷,隨機 I/O 多 | 順序遍歷鏈表,順序 I/O 高效 |
| 磁盤利用率 | 內部節點存儲數據,空間利用率低 | 內部節點緊湊,空間利用率高 |
| 應用場景 | 內存數據庫、小規模索引 | 關系型數據庫、文件系統 |
五、典型應用場景與優化策略
5.1 數據庫索引設計
聚簇索引(Clustered Index)
- 實現:B + 樹葉子節點存儲完整數據行(如 InnoDB 主鍵索引)。
- 優勢:范圍查詢性能極高(順序掃描鏈表)。
- 優化:
- 選擇短主鍵(如自增整數),減少葉子節點大小。
- 預分配連續頁空間,減少頁分裂。
非聚簇索引(Secondary Index)
- 實現:B + 樹葉子節點存儲主鍵值,需回表查詢完整數據。
- 優化:
- 使用覆蓋索引(Covering Index),將常用字段包含在索引中。
- 避免 SELECT *,減少回表次數。
5.2 文件系統目錄管理
- 場景:NTFS、Ext4 等文件系統使用 B + 樹管理目錄結構。
- 優勢:
- 快速定位文件路徑(逐層查找內部節點)。
- 高效遍歷目錄下所有文件(葉子節點鏈表)。
5.3 內存緩存優化
- 策略:
- 將 B + 樹非葉子節點常駐內存,減少磁盤 I/O。
- 利用 LRU 算法緩存高頻訪問的葉子節點。
六、性能對比與選型建議
6.1 性能測試數據(百萬級數據)
| 操作 | B 樹(m=100) | B + 樹(m=100) |
|---|---|---|
| 點查詢(ms) | 0.8-1.2 | 1.0-1.5 |
| 范圍查詢(ms) | 50-80 | 5-10 |
| 插入(ms / 千條) | 15-20 | 10-15 |
| 刪除(ms / 千條) | 18-25 | 12-18 |
6.2 選型指南
- 選 B 樹:
- 數據量小(<10 萬條)。
- 點查詢占比極高,且內存足夠容納索引。
- 選 B + 樹:
- 數據量大(>10 萬條)。
- 范圍查詢、排序操作頻繁。
- 需要高效磁盤 I/O 性能。
七、可視化工具與學習資源
- 動態演示工具:
- B 樹可視化
- B + 樹可視化
- 教材推薦:
- 《算法導論》第 18 章(B 樹)
- 《數據庫系統概念》第 11 章(索引結構)
- 實戰案例:
- MySQL InnoDB B + 樹索引深度解析
- Linux Ext4 文件系統 B + 樹實現
八、總結
B 樹與 B + 樹是為磁盤存儲優化而生的核心數據結構:
- B 樹適合內存有限、點查詢密集的場景,通過平衡多路搜索實現高效隨機訪問。
- B + 樹通過葉子節點鏈表和更高扇出,成為數據庫索引和文件系統的黃金標準,尤其擅長范圍查詢和順序訪問。


![[Oracle] TRUNC()函數](http://pic.xiahunao.cn/[Oracle] TRUNC()函數)




)



)






和當前最高分辨率的LED顯示器對比)
