
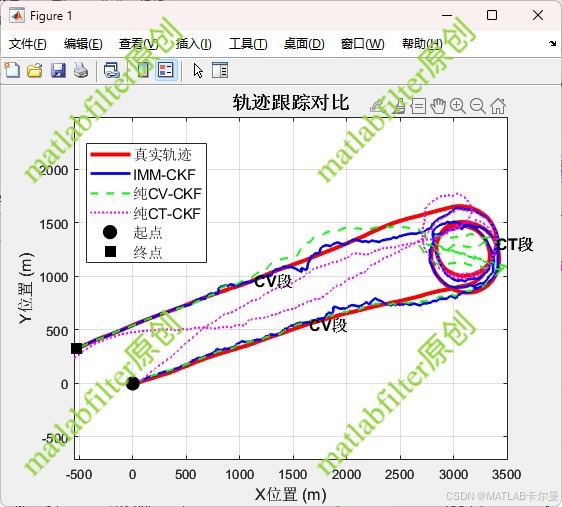
本程序實現了基于交互多模型(IMM)+容積卡爾曼濾波(CKF)的多模型融合定位方法,并與純CV?CKFCV-CKFCV?CKF(勻速模型)和CT?CKFCT-CKFCT?CKF(勻角速度轉彎模型)方法對比。目標是應對目標運動過程中模型切換(如直線、轉彎)的情況,提升濾波估計精度。
文章目錄
- 程序簡介
- 運行結果
- MATLAB源代碼
程序簡介
這段程序實現了基于交互多模型(IMMIMMIMM)與非線性濾波方法的目標跟蹤算法,主要用于解決目標在不同運動模式下(如直線、轉彎)動態切換時的定位與速度估計問題。程序中綜合了兩種典型的運動模型,通過動態調整模型概率,實現了對機動目標的精準跟蹤,同時與單一模型方法(如勻速、勻角速度)進行了性能對比。
代碼通過模擬復雜的真實運動軌跡和觀測數據,利用多模型的融合策略動態適配不同運動階段,提升了估計精度和穩定性。最終,程序輸出了完整的估計結果、誤差曲線及模型概率的變化情況,清晰展示了多模型方法在處理機動目標時的優勢與效果,適合用于定位導航、目標跟蹤等應用場景的算法驗證與教學示范。
更多介紹見代碼中的中文注釋注釋。
運行結果
軌跡跟蹤對比:
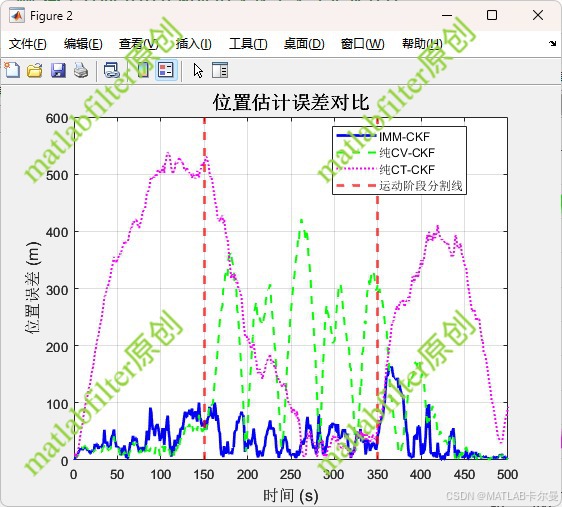
位置估計誤差對比:
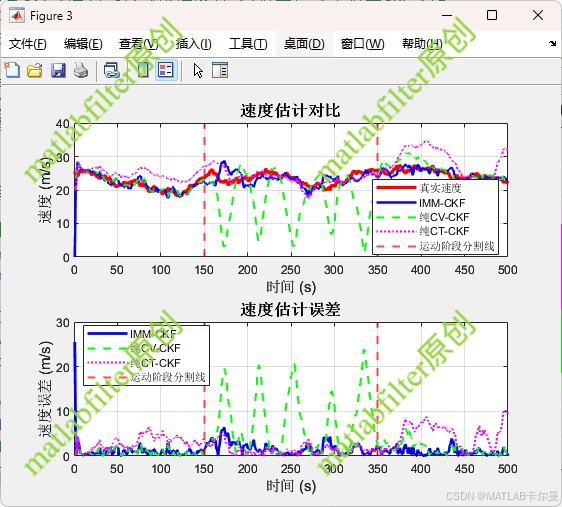
速度估計誤差對比:
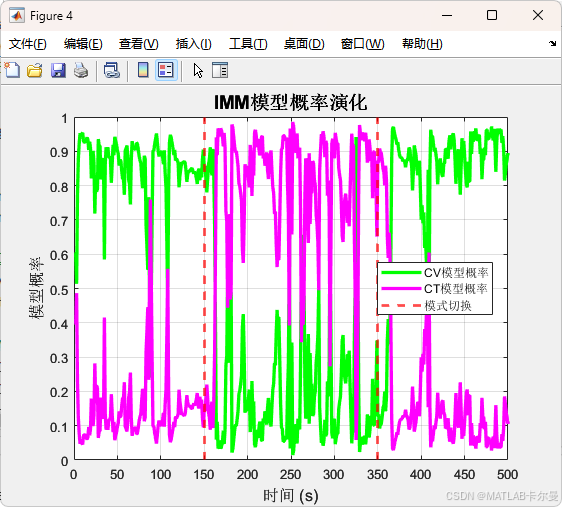
概率曲線:
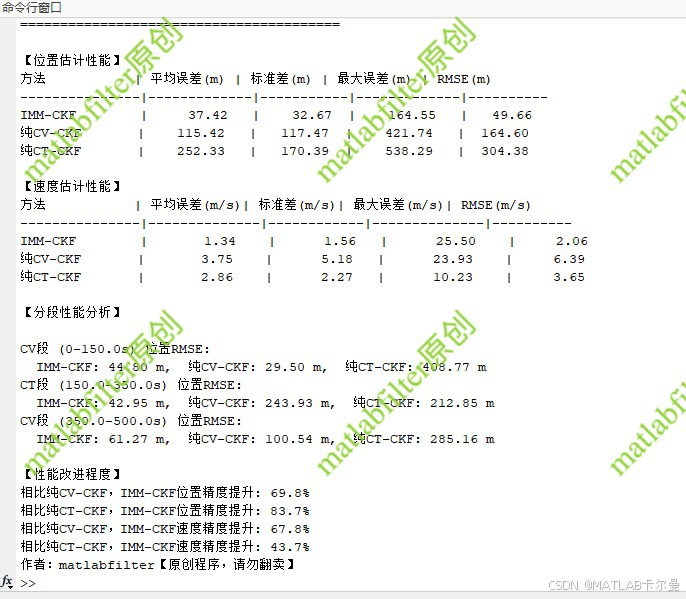
誤差輸出:
MATLAB源代碼
程序結構如下:
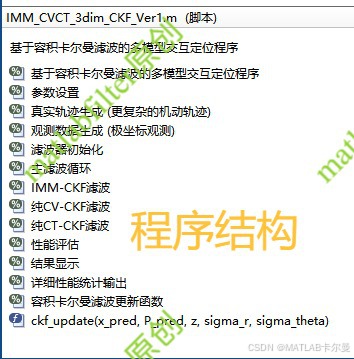
部分代碼如下:
%% 基于容積卡爾曼濾波的多模型交互定位程序
% 包含CV(勻速)和CT(勻角速度轉彎)模型,與單模型CKF對比
% 作者:matlabfilter
% 2025-07-20/Ver1clear; clc; close all;
rng(0);
%% 參數設置
T = 1; % 采樣時間
N = 500; % 仿真步數
omega = 0.08; % CT模型角速度 (rad/s)% 測量噪聲參數
sigma_r = 8; % 距離測量標準差
sigma_theta = 0.08; % 角度測量標準差% 過程噪聲參數
q_cv = 0.2; % CV模型過程噪聲強度
q_ct = 0.2; % CT模型過程噪聲強度% IMM參數
pi11 = 0.98; pi12 = 0.02; % CV到CV和CV到CT的轉移概率
pi21 = 0.03; pi22 = 0.97; % CT到CV和CT到CT的轉移概率
Pi = [pi11, pi12; pi21, pi22]; % 模型轉移概率矩陣mu = [0.6; 0.4]; % 初始模型概率%% 真實軌跡生成 (更復雜的機動軌跡)
x_true = zeros(4, N); % [x, y, vx, vy]
x_true(:,1) = [0; 0; 25; 5]; % 初始狀態% 生成復合機動軌跡完整的代碼,下載鏈接:https://download.csdn.net/download/callmeup/91421888
如需幫助,或有導航、定位濾波相關的代碼定制需求,請點擊下方卡片聯系作者

:總體介紹)









 邏輯備份實操)

 運行HelloWorld)
區別)

)


